![]()
|
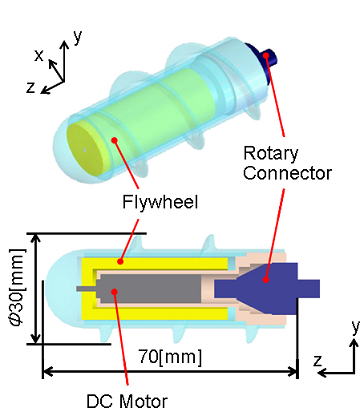
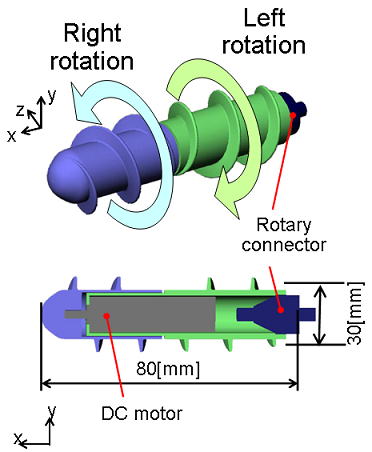
1. WQE-1 大きくわけて, 1. 回転慣性型,2. 逆ねじ型について研究を行いました. |
||
|
1.1. 回転慣性型(Rotational inatia type)
|
|
1.2. 逆ねじ型(Reverse screw type)
|
| ページトップへ |
|---|
![]()
|
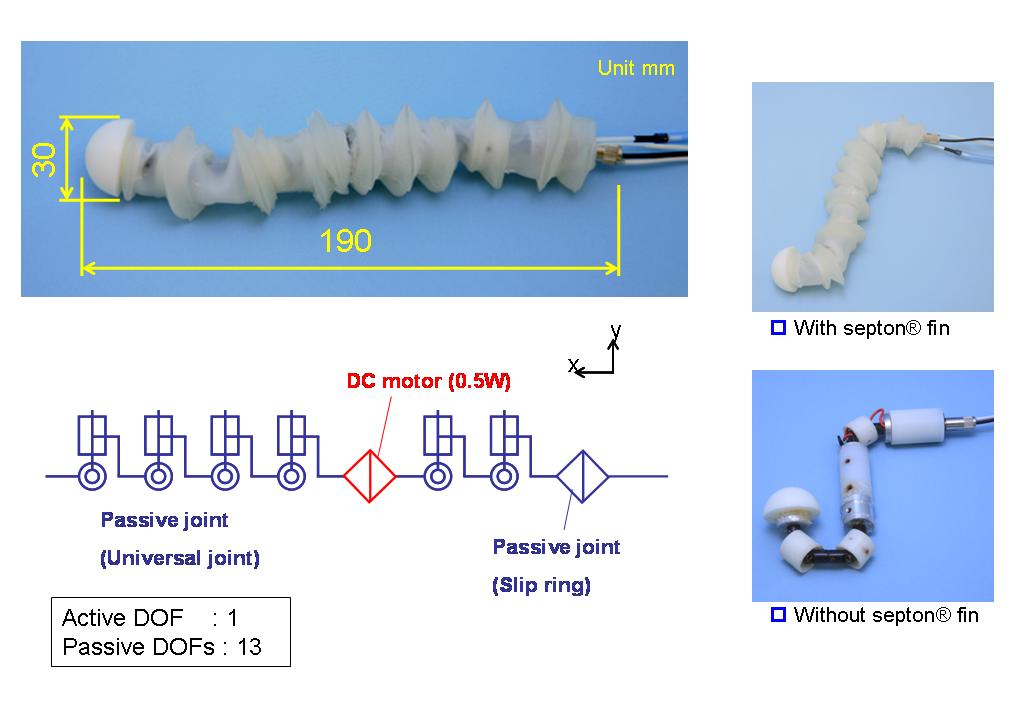
2. WQE-2 | ||
|
| ページトップへ |
|---|
![]()
|
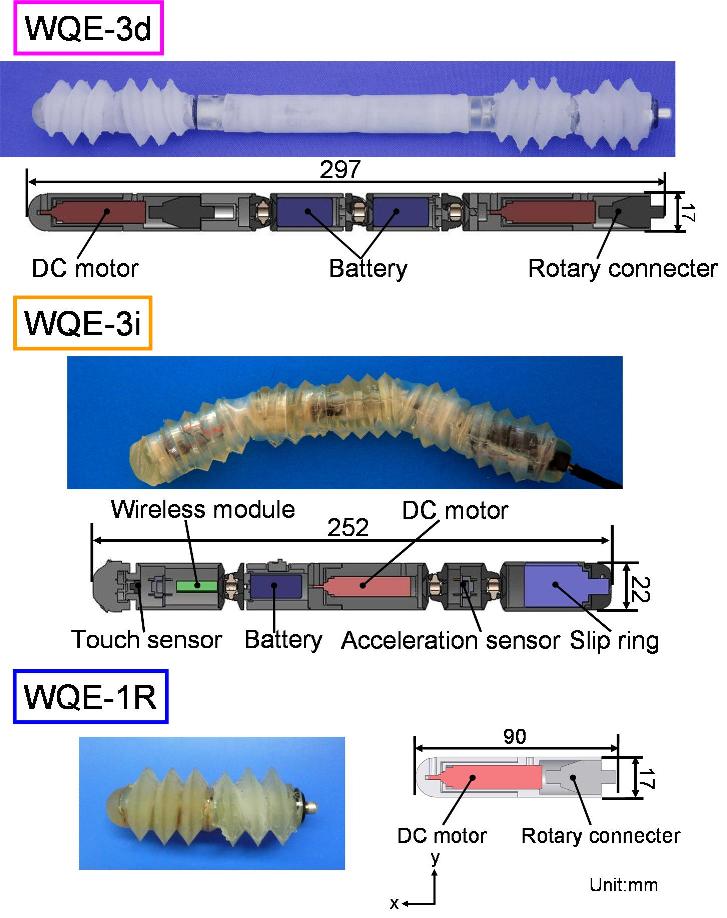
3. WQE-3 | |||||||||
| 3.1.ハードウェア | |||||||||
|
|||||||||
|
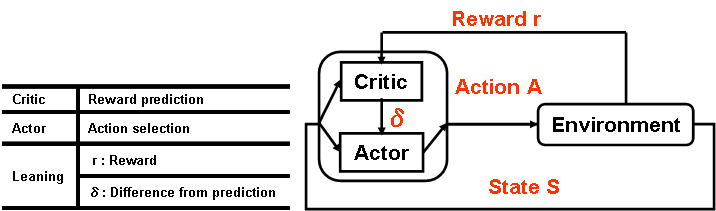
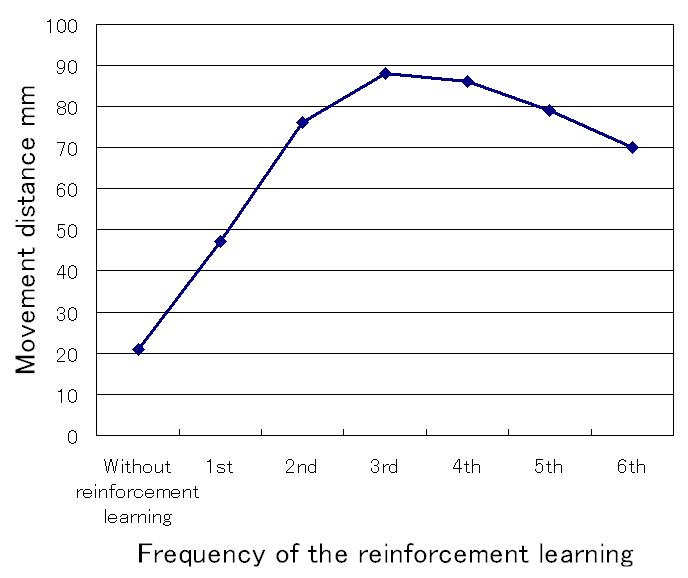
3.2.制御(強化学習)
|
| ページトップへ |
|---|
![]()
|
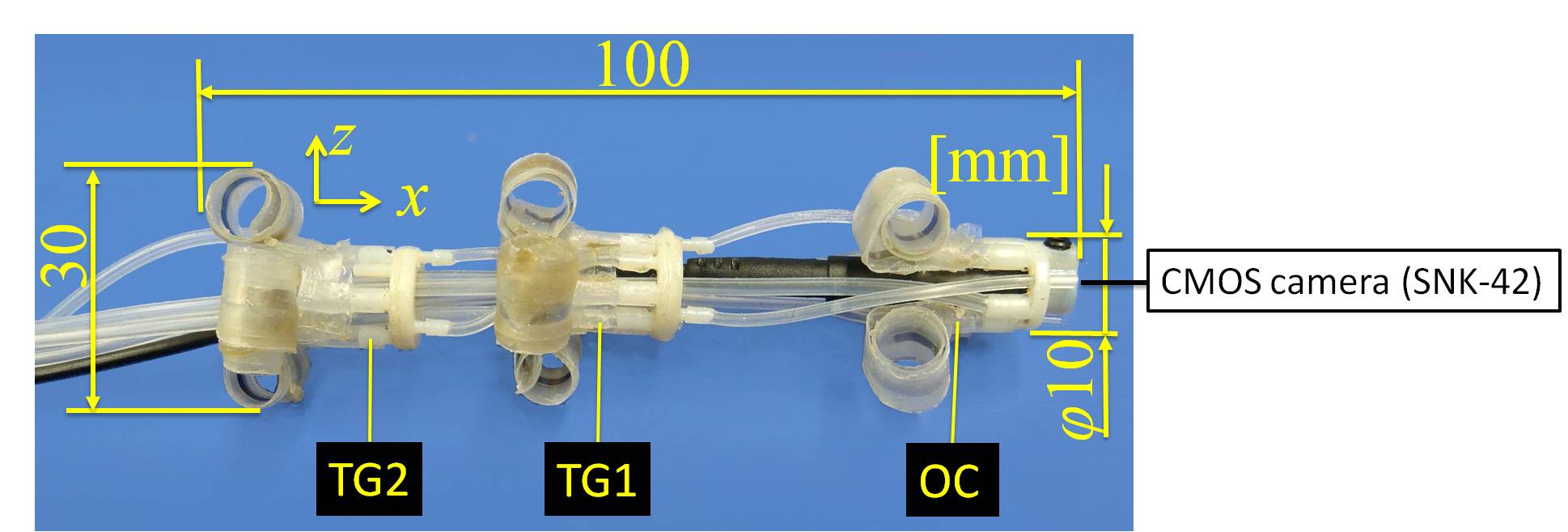
4.WQE-4 |
|||||
|
|
|||||
|
4.1.吹き戻し型脚 |
|||||
|
|
|||||
 |
|||||
|
| |||||
|
| |||||
|
4.2.ハードウェア |
|||||
|
|
|||||
|
|||||
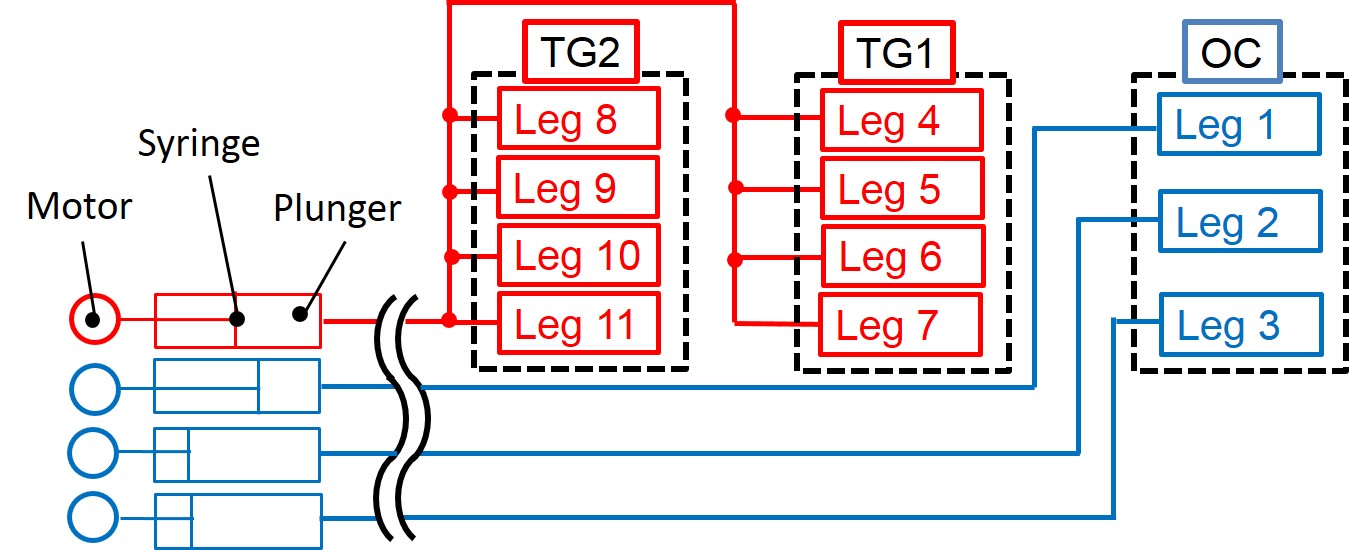
| WQE-4の脚にはシリンジポンプを用いて空気を供給しています.以下にシリンジと脚の対応関係を示します. |
|||||
|
|||||
Movies |
|||||
|
|||||
|
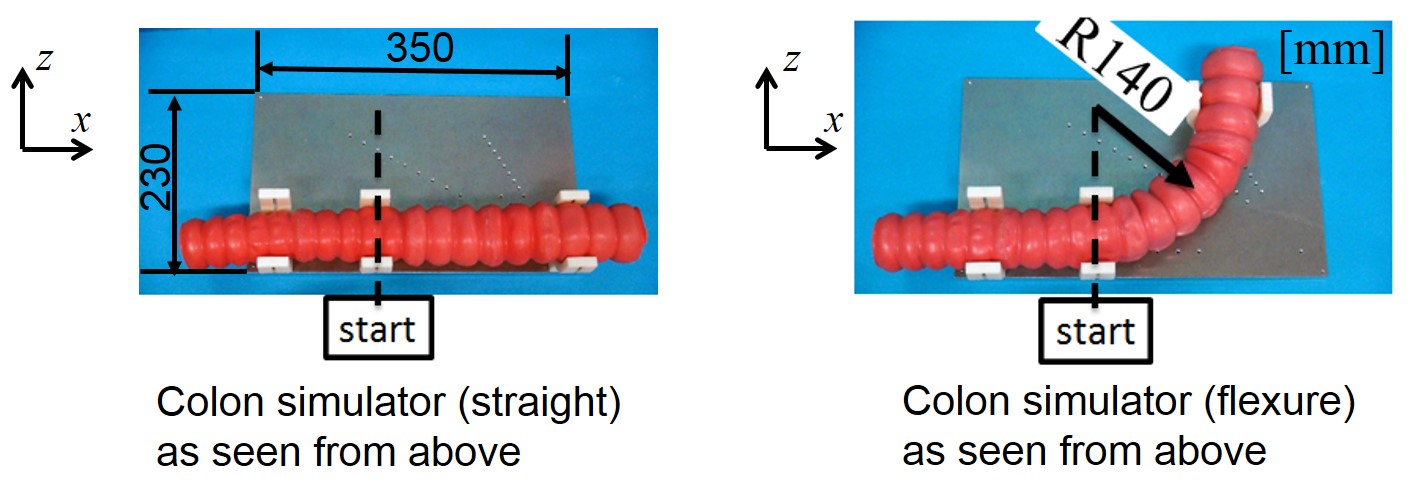
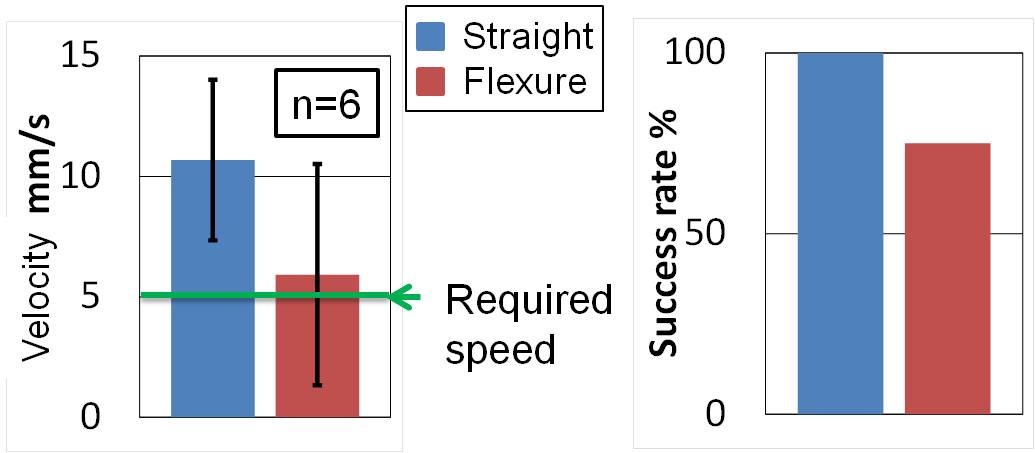
4.3.評価実験 |
|||||
|
|
|||||
|
|||||
|
|
|||||
|
|||||
|
Movie |
|||||
|
|
|||||
|
4.4.今後の展望 |
|||||
|
|
| ページトップへ |
|---|
![]()
|
5.WQE-5 |
|||||
|
|
|||||
|
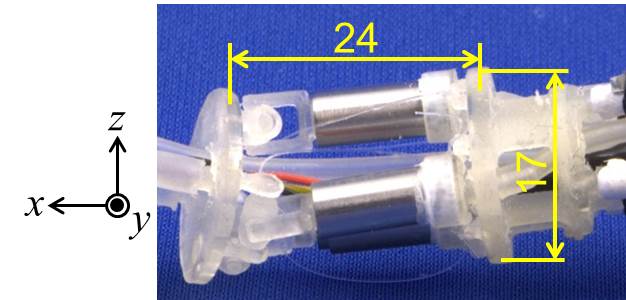
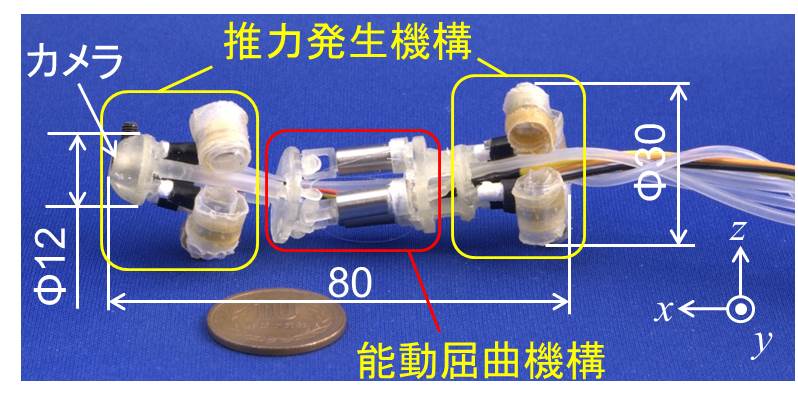
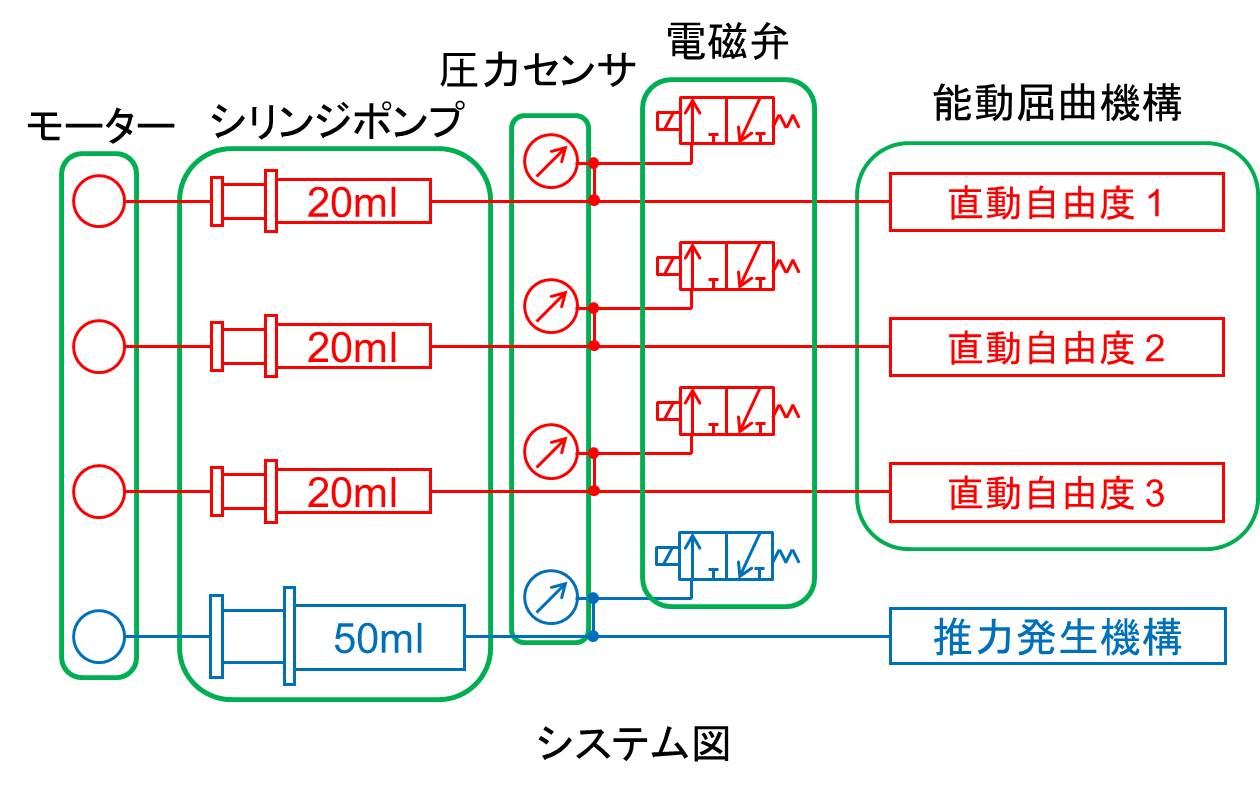
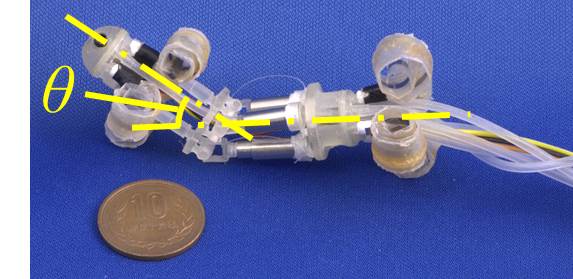
5.1.能動屈曲機構 |
|||||
|
|
|||||
|
|||||
|
| |||||
|
|
|||||
|
|
|||||
  |
|||||
|
Movies |
|||||
|
|||||
|
|
|||||
|
|
|||||
|
|||||
|
|
|||||
|
|||||
|
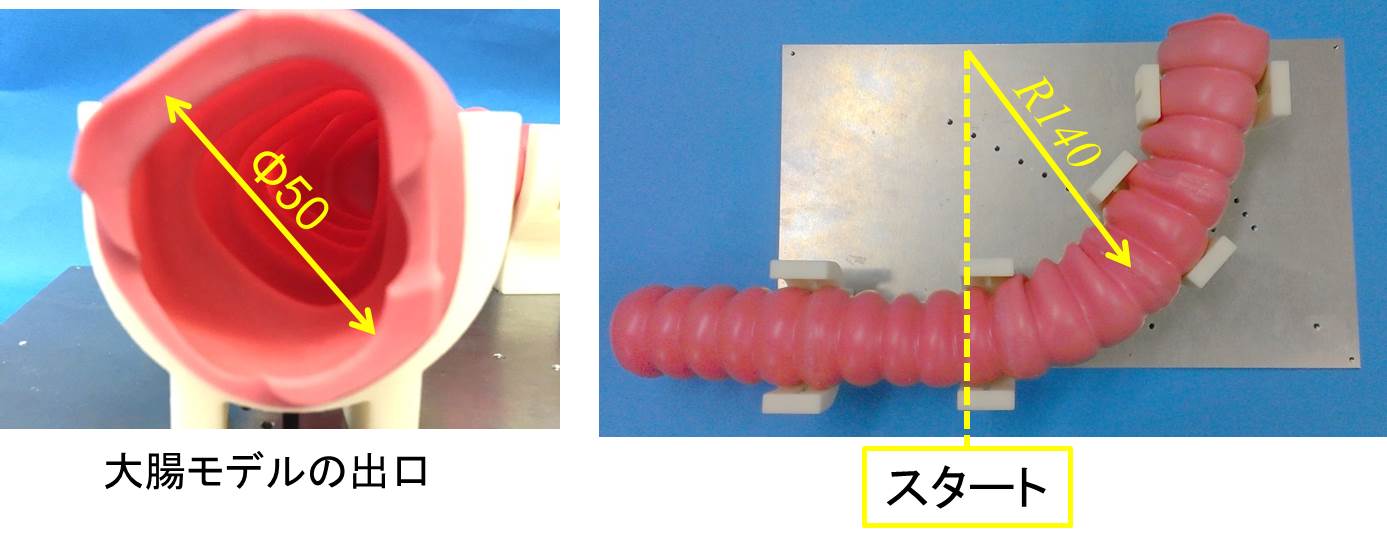
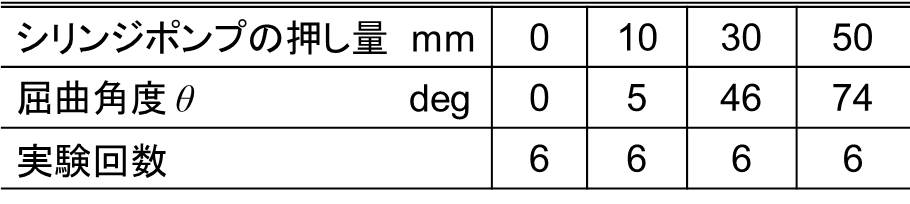
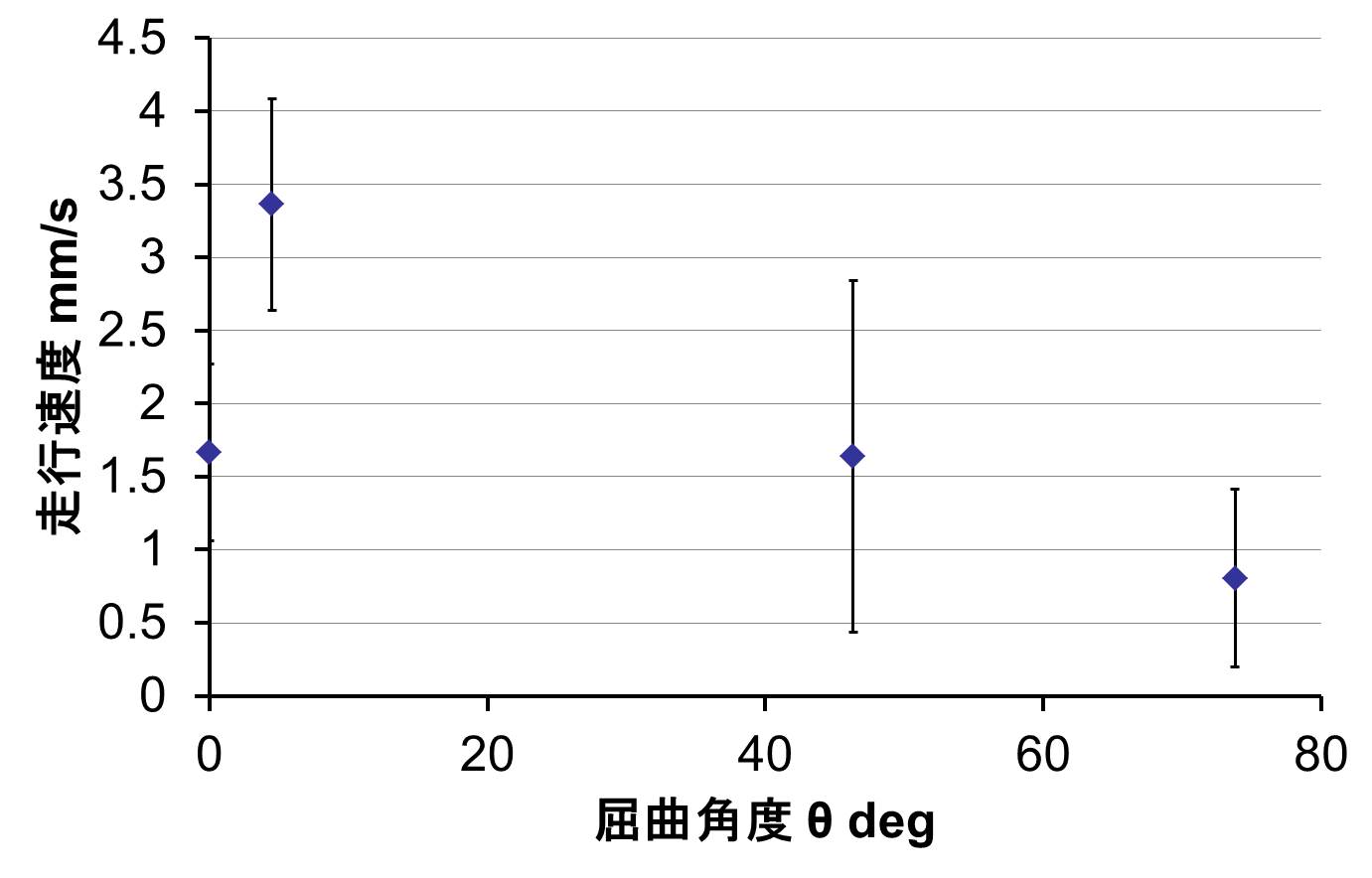
以下にWQE-5の屈曲角度と走行速度の結果を示します. |
|||||
|
|||||
|
|
|||||
|
|
|||||
|
5.4.今後の展望 |
|||||
|
|
| ページトップへ |
|---|