![]()
|
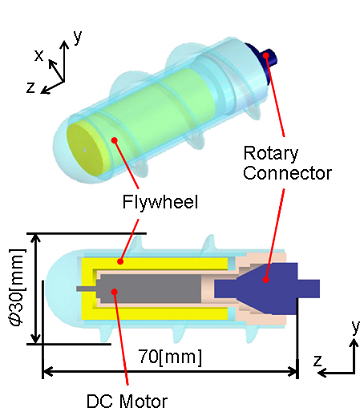
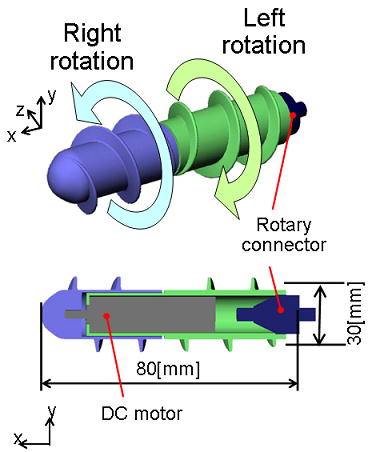
1. WQE-1 In this research, two type robots have been developed. 1.Rotary inertia type and 2.Reverse screw type. |
||
|
1.1. Rotational inatia type
|
|
1.2. Reverse screw type
|
| Page Top |
|---|
![]()
|
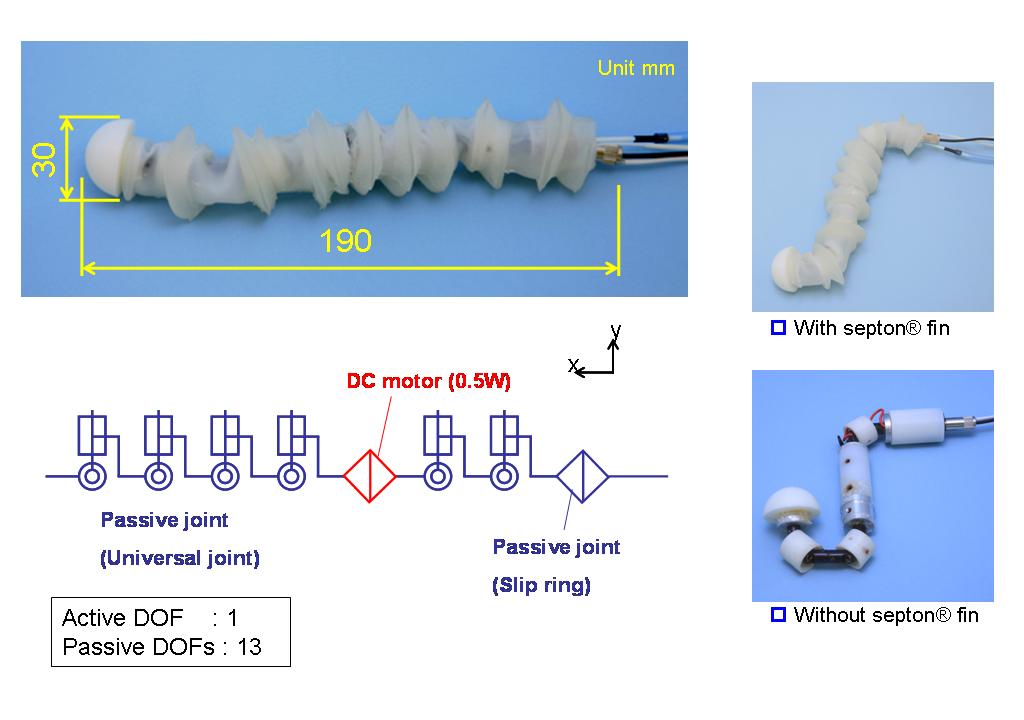
2. WQE-2 | ||
|
| Page Top |
|---|
![]()
|
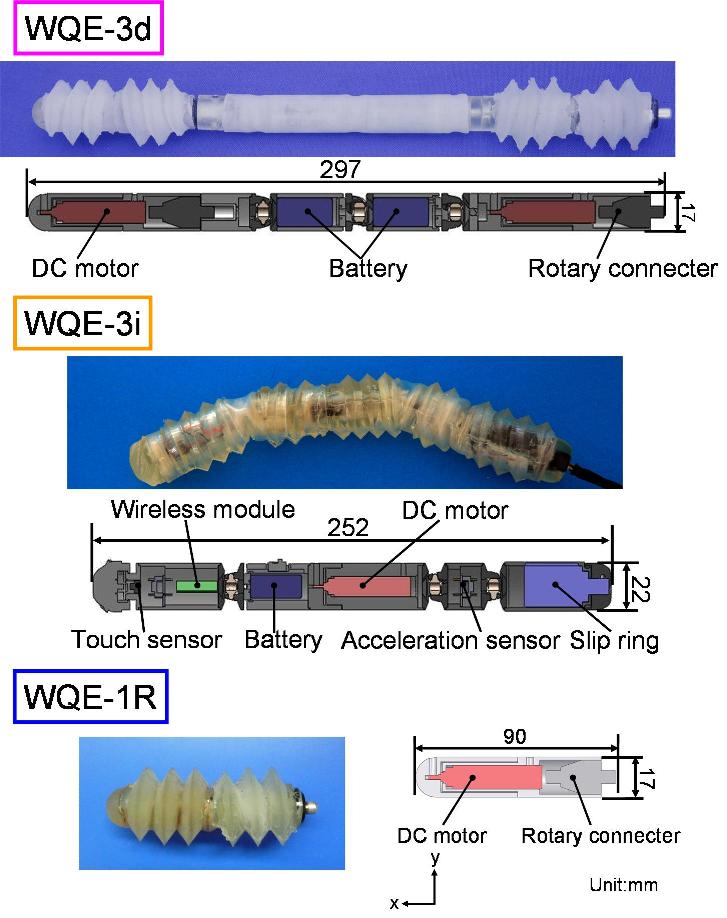
3. WQE-3 | |||||||||
| 3.1.ハードウェア | |||||||||
|
|||||||||
|
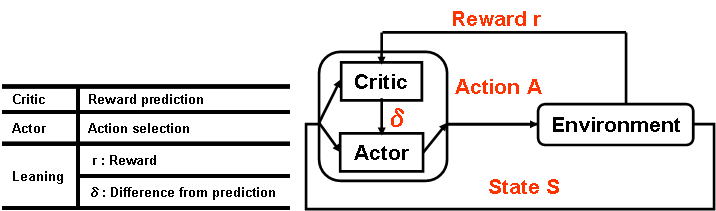
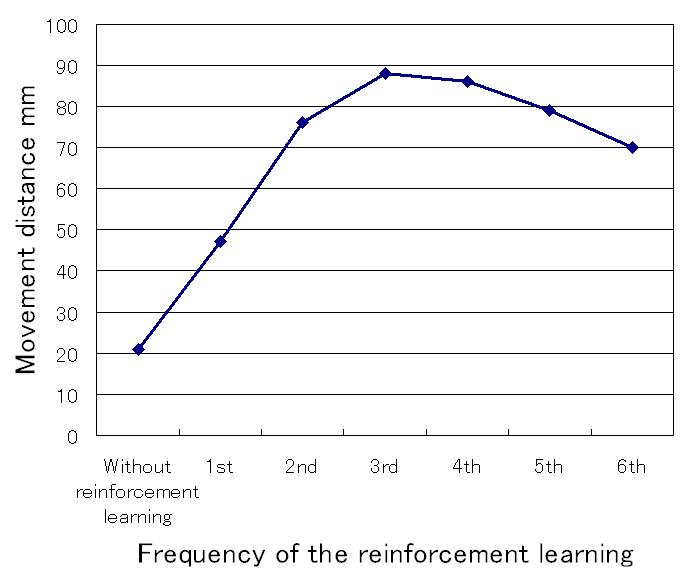
3.2.Control(Reinforcement Learning)
|
| Page Top |
|---|
![]()
|
4.WQE-4 |
|||||
|
|
|||||
|
4.1.Pneumatic actuator |
|||||
|
|
|||||
| |||||
|
| |||||
|
|
|||||
|
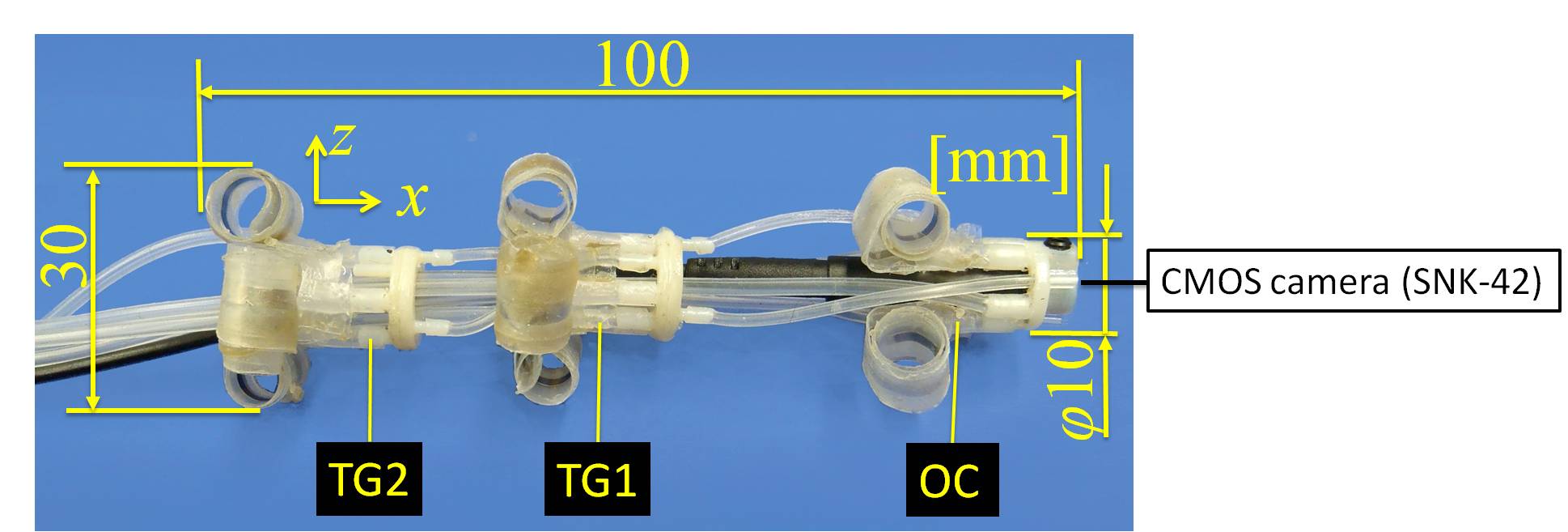
4.2.Hard ware |
|||||
|
|
|||||
|
|||||
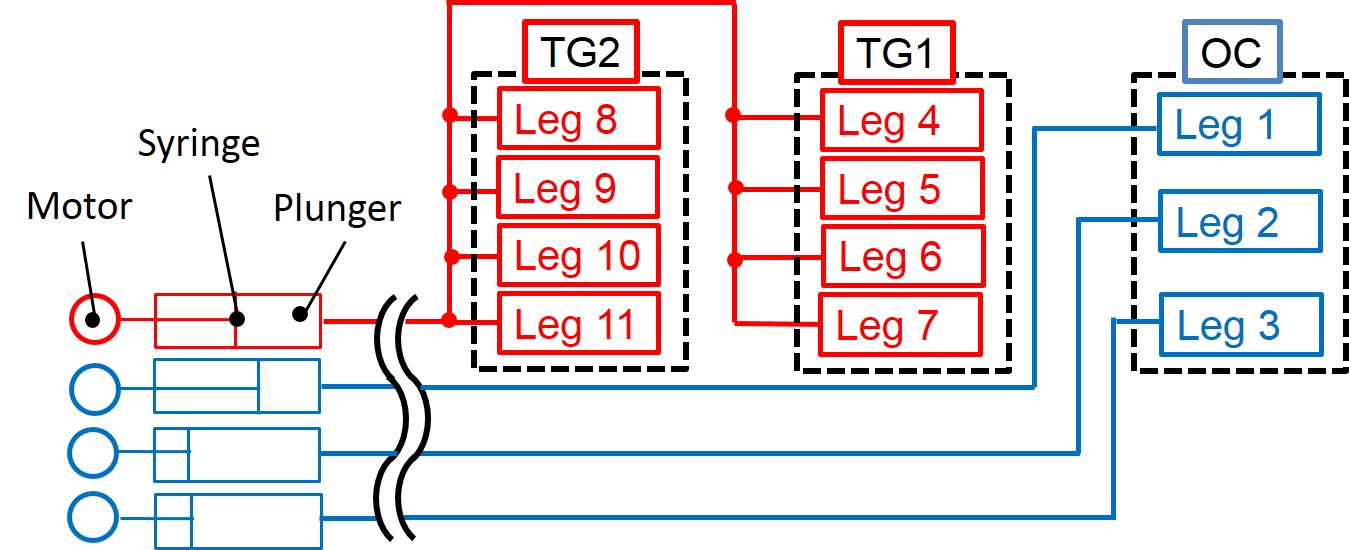
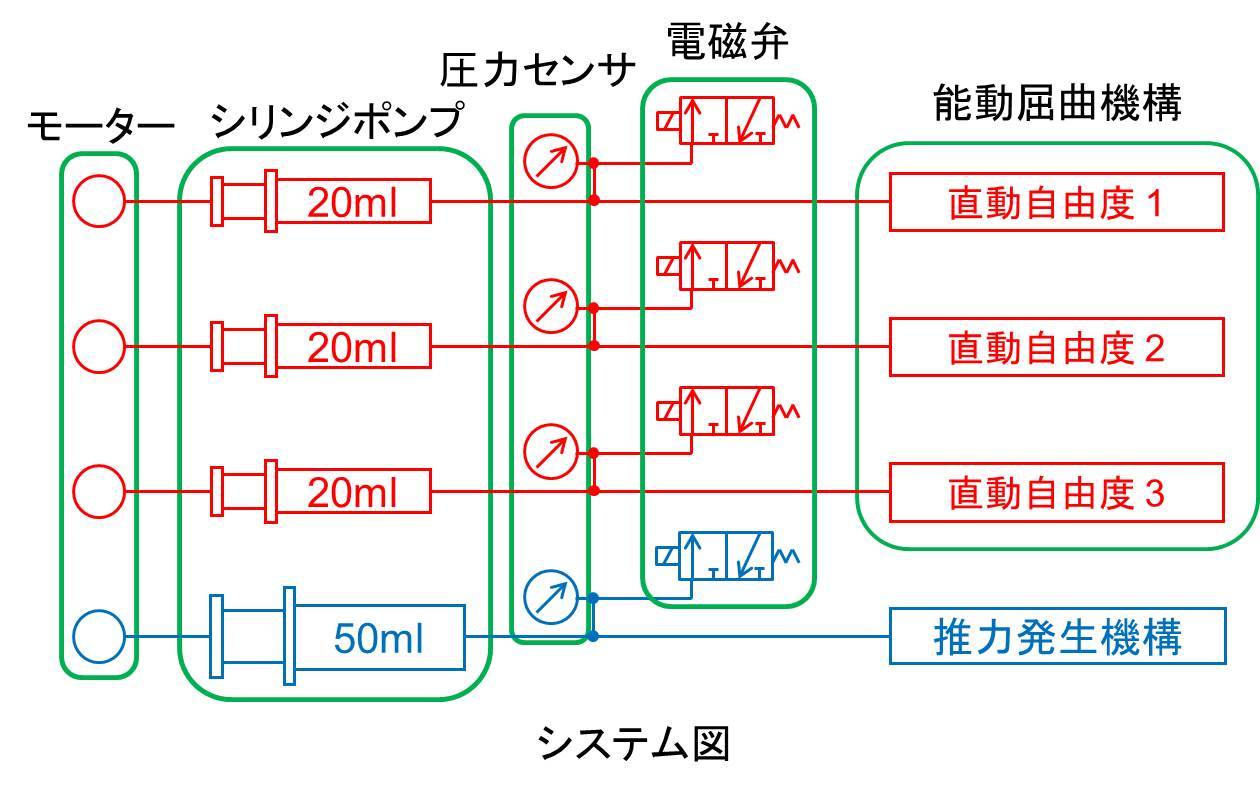
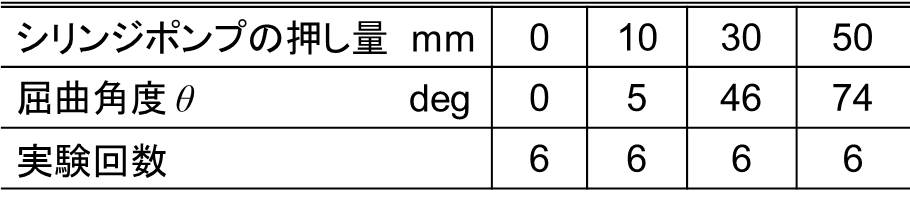
| We supply legs with air by syringe pump. We show the correspondence between the syringe pump and the legs below. |
|||||
|
|||||
Movies |
|||||
|
|||||
|
4.3.Evaluation experiment |
|||||
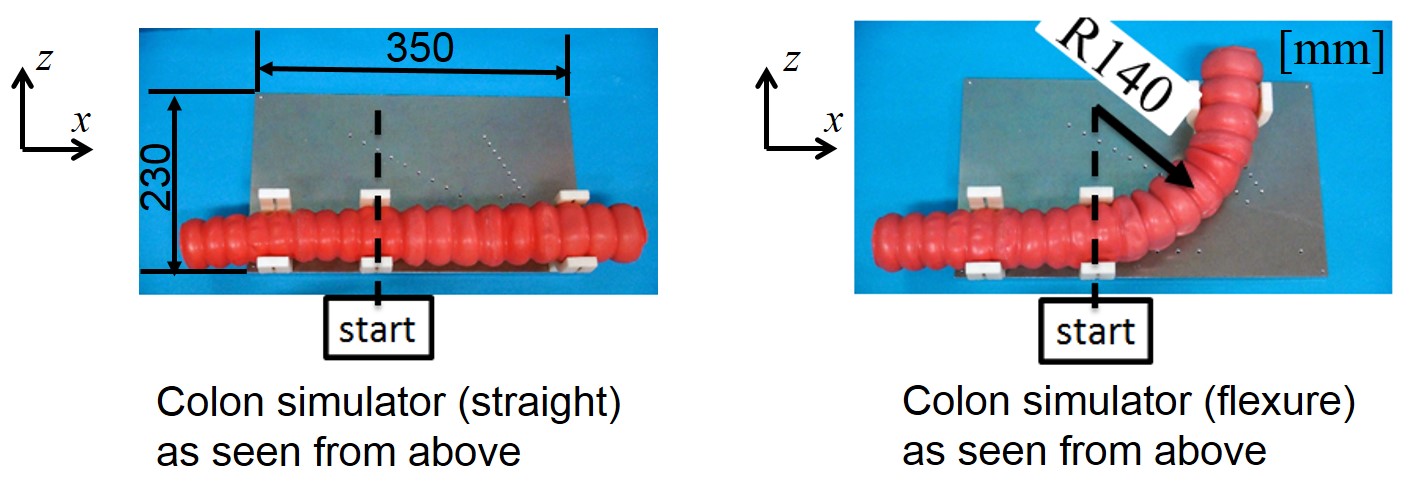
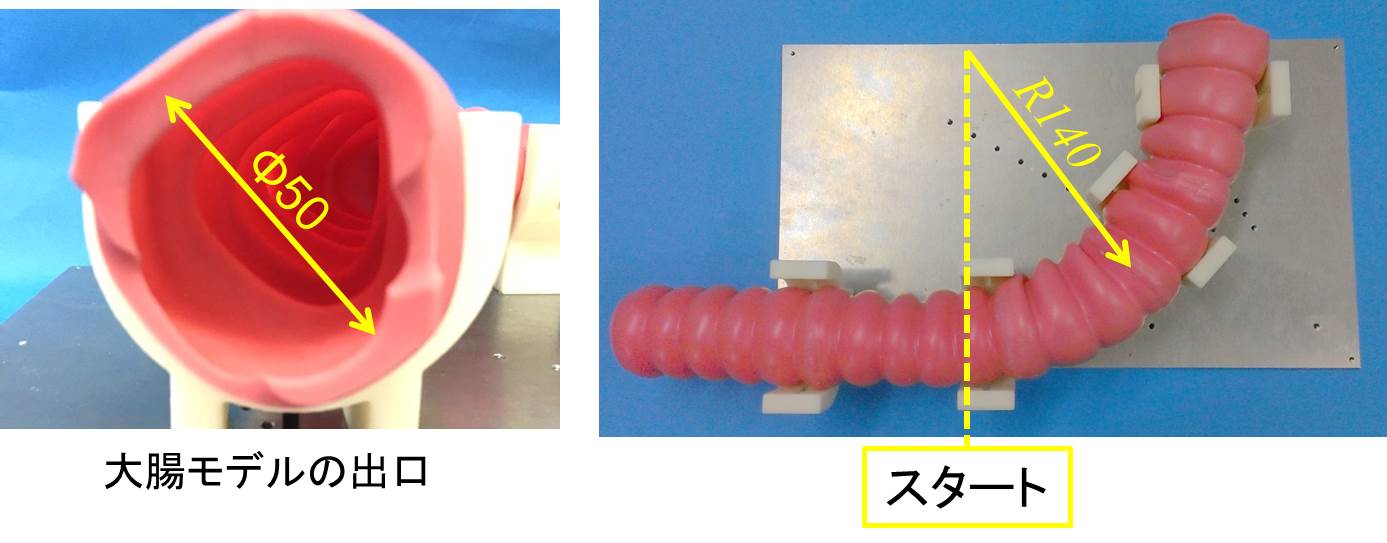
Locomotion performances of WQE-4 are evaluated in the straight colon simulator and the curved colon simulator (R=140[mm],90[deg]). We measured the time required to move 200 mm in each simulator. In the case we found WQE-4 was caught by the colon fold, we stopped the trial and recorded this trial as a failure trial. |
|||||
 |
|||||
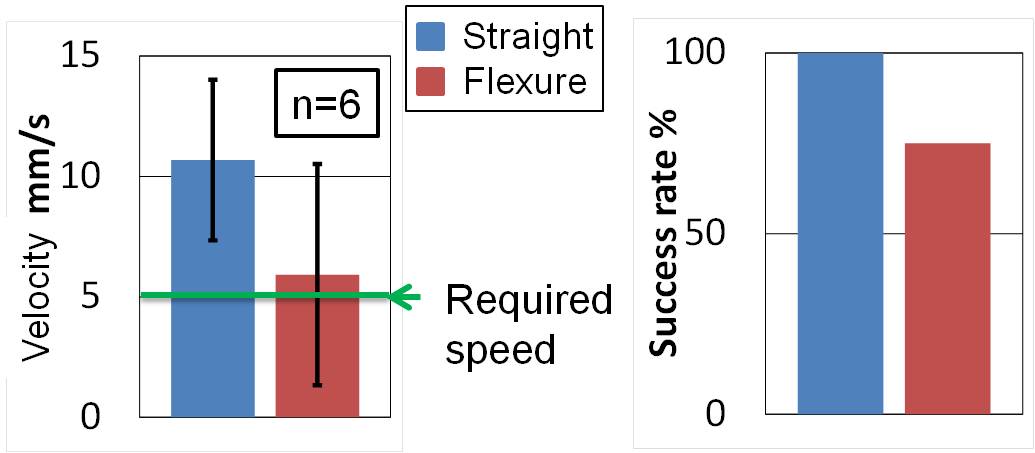
Mean velocity and success rate are shown in below. In this experiment, we confirm the effectiveness of WQE-4 in the colon simulator. |
|||||
 |
|||||
|
Movie |
|||||
|
|
|||||
|
4.4.Future works |
|||||
| We found several failure trials in the experiment with the curved colon simulator. Therefore, further improvements on hardware are required to increase locomotion performance of the robot in the curved colon. Experiments using real colons (colon from dead swain) are expected to estimate performance of WQE-4 in the human colon. |
| Page Top |
|---|
![]()
|
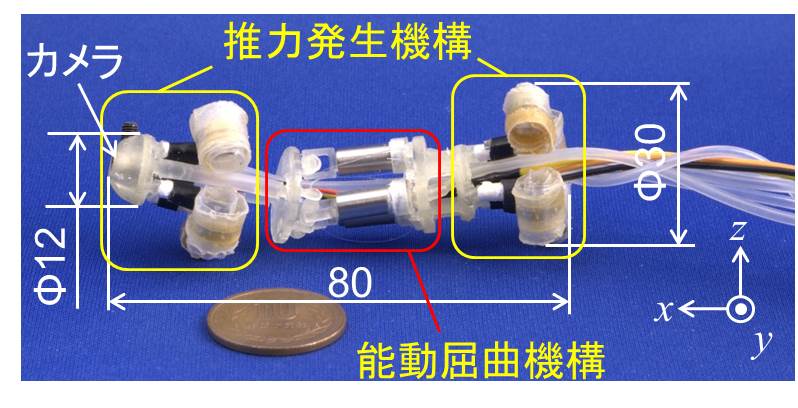
5.WQE-5 |
|||||
|
|
|||||
|
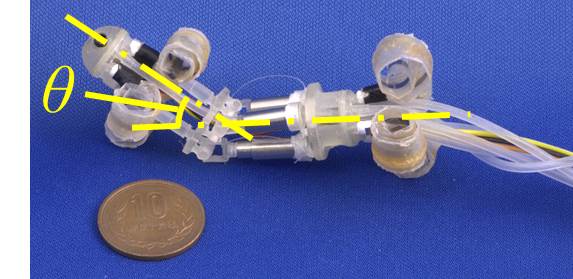
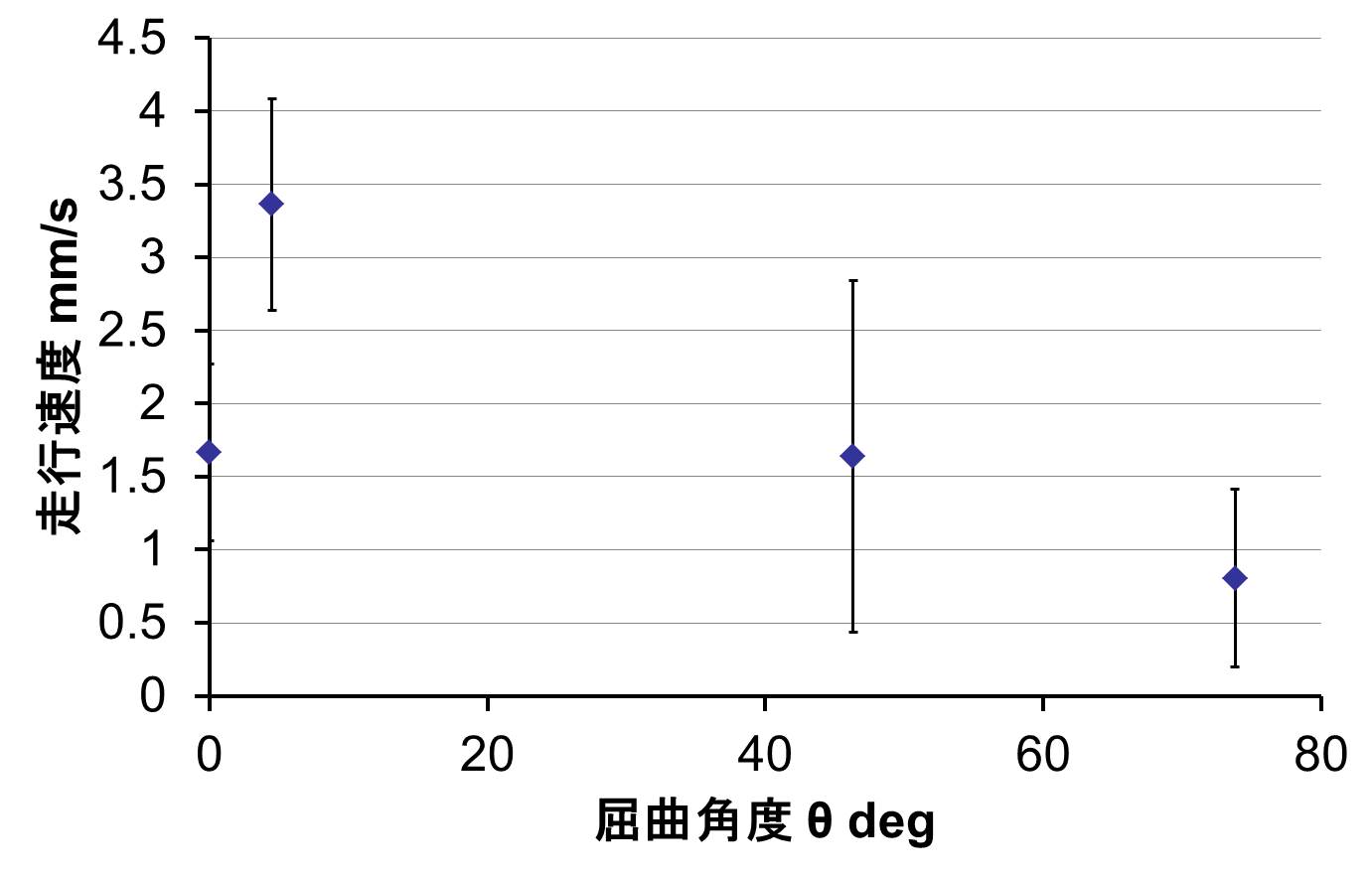
5.1.Active bend mechanism |
|||||
|
|
|||||

|
|||||
|
| |||||
|
|
|||||
|
|
|||||
  |
|||||
|
Movies |
|||||
|
|||||
|
|
|||||
|
|
|||||
|
|||||
|
|
|||||
|
|||||
|
|||||
|
|
|||||
|
|
|||||
|
5.4.Future works |
|||||
|
|
| Page Top |
|---|