WKA-1
( Waseda Kyotokagaku A irway -No. 1 )
Airway management is a basic skill that it is provided during emergency situation such
as: cardiopulmonary arrest, multiple injury, unconsciousness, and general anesthesia.
In general, Airway management is not only managed in order to supply oxygen into
the lung but also to prevent the lung from gastric foreign body and bleeding due
to an external wound(Fig.1). Even though it is a basic medical operation, different
kinds of accidents (i.e. non-provision of oxygen into the lung, trauma, and complication
by the excessive applied forces on organs) may occur when an unskilled person provides
it
In general, trainees could be trained to perform Airway management by two methods.
The first method is by practicing with a human volunteer with the assistance of
an expert. This approach may too risky for human volunteers so it is scarcely used.
The second method is based on the use of airway management mannequins, which reproduces
with high fidelity the anatomy of the human organs. However, such devices do not
provide any quantitative information about the learning progress of trainees.
In order to provide the amount of feedback information,and assess their operation
objectively, we have developed Airway Management Training system WKA-1.As a first
approach, we have focused on redesigning three kinds of sensor systems and embedding
arrays of sensors to a conventional mannequin. Finally, we carry out the experiment
with doctors and unskilled subjects in order to confirm the effectiveness of proposed
evaluation function.
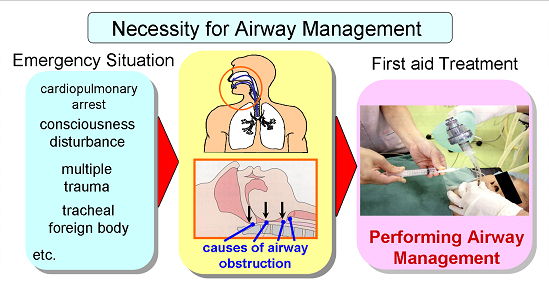
Fig. 1 Purpose of Airway managment |
2.Mechanisms
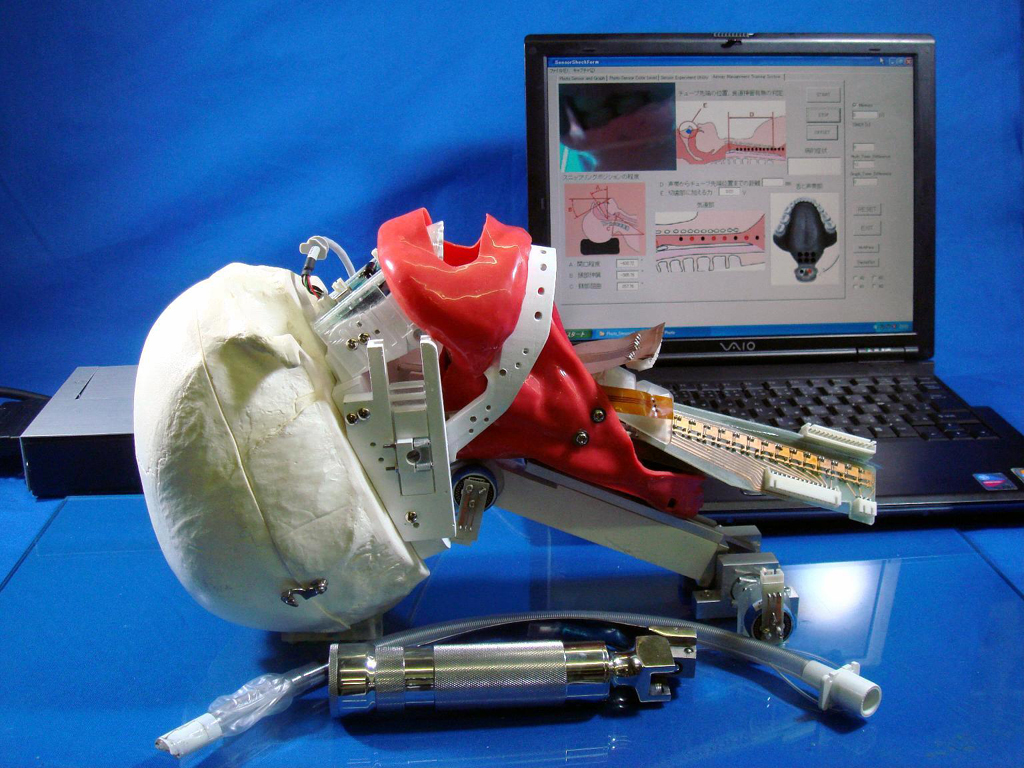
2.1 WKA-1
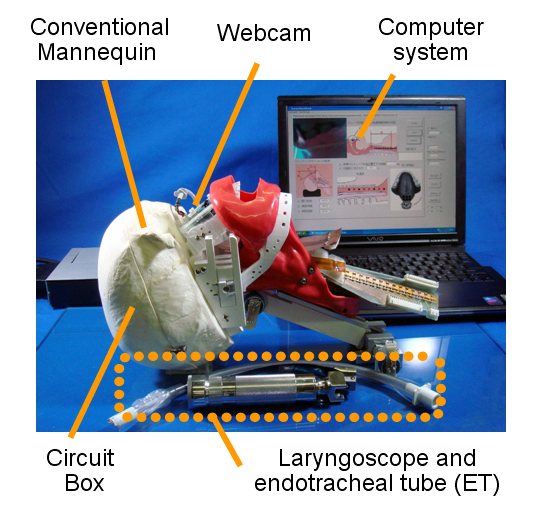
Fig.2 WKA-1(
Waseda
KyotoKagaku
Airway No.
1)
The proposed WKA-1 consists of a conventional mannequin and a computer system(Fig.2). The mannequin is composed by seven main parts such as: head, neck, chest, incisor teeth, tongue, vocal cord, and trachea. The parts was designed based on anatomy.Moreover, all of components embed a lot of sensor systems such as improved Force Detection Sensor System (FDSS), Displacement Detection Sensor System (DDSS), Position Detection Sensor System (PDSS), Potentiometer (PM)(Fig.3).
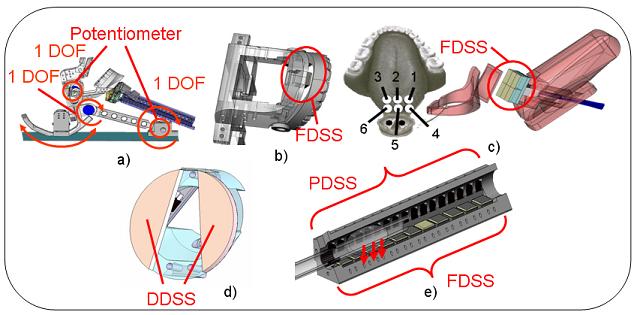
a) Head, b) Incisor teeth, c) Tongue, d) Vocal Cord, e) Trachea
Fig.3 The parts of WKA-1
2.2 Sensor system
2.2.1 Force Detection Sensor System(FDSS)
The FDSS consists of 3 layers: black elastic sponge, white reflective plastic, and photo interrupter(Fig.4). By using photo interrupter,FDSS measures elastic deformation of the elastic sponge. When light is emitted from the GaAs IRED and reflected by the white reflective plastic, the photo transistor received the reflected light. When the distance between the photo interrupter and the white reflective plastic become closer, the reflected light’s quantity becomes larger. The electric current that flows inside the phototransistor will increase in proportion to the reflected light quantity. By using this mechanism, we can sense the upward and downward movement of elastic sponge due to the applied force from trainees. By using an A/D converter, the information obtained from the sensor can be processed by a computer.
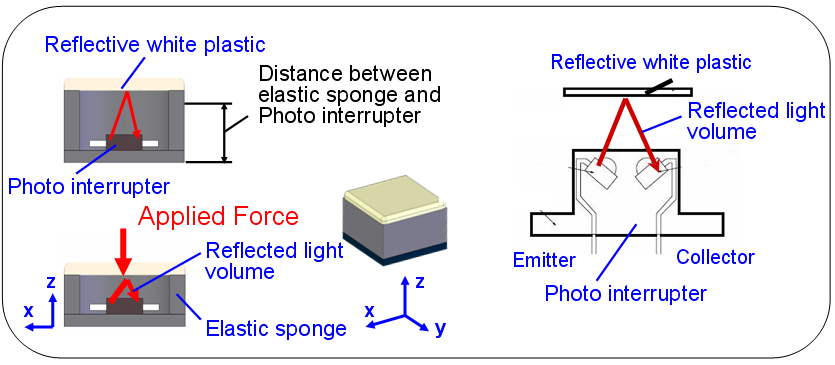
Fig.4 Principle of FDSS
2.2.2 Position Detection Sensor Systems(PDSS)
In order to detect the position of an object, it is required the use of one photo interrupter and a black hollow material surrounded as it is shown in Fig. 4. At first, when an object is not present in front of the photo interrupter, the black hollow material will absorb the emitted light. Therefore, the electric current that flows inside the phototransistor will not change. When any object is placed in front of the photo interrupter, the emitted light will be reflected and the electric current that flows inside the photo interrupter will change. Such current will increase in proportion to the reflected light volume. When the output voltage of PDSS is over threshold 0.3[v], it is converted into 1. Instead, when output voltage of PDSS is less than 0.3[v], it is converted into 0. To sense the position of an object,we embedded 13 photo interrupters separated by intervals of 8mm along a tube.
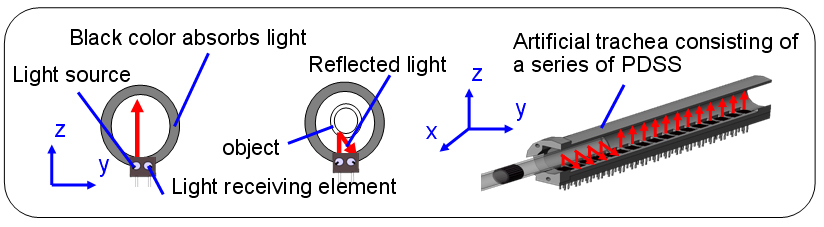
Fig.5 Principle of PDSS
2.2.3 Displacement Detection Sensor System(DDSS)
The DDSS consists of a reflective elastic material and a photo interrupter(Fig.6). The principle of sensor system is similar to that of FDSS; however DDSS uses a black reflective sponge instead of a reflective elastic material.
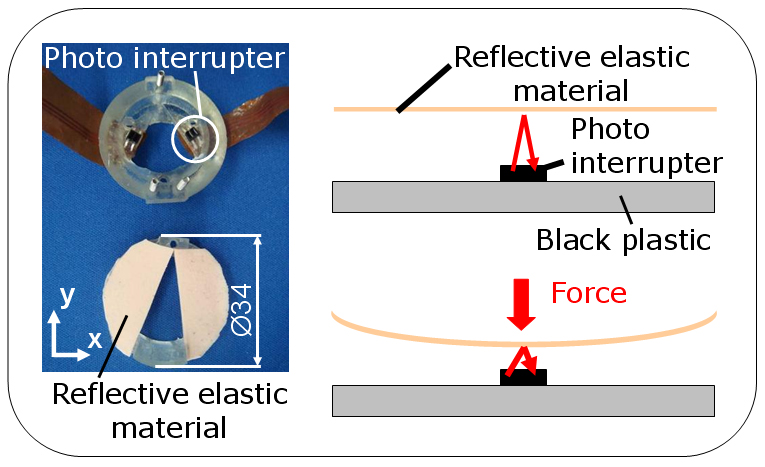
Fig.6 Principle of DDSS
3.Experimental result
In order to verify the usefulness of developed AMTS while acquiring quantitative information, we carried out some preliminary experiments. In particular, we have asked 7 doctors and 5 unskilled students to provide airway management using the WKA-1. We obtained the information of each doctors and unskilled students such as: the time of intubation, the force applied on the incisor teeth, the angle of mouth opening, the forces applied on tongue and vocal cord(Fig.8).
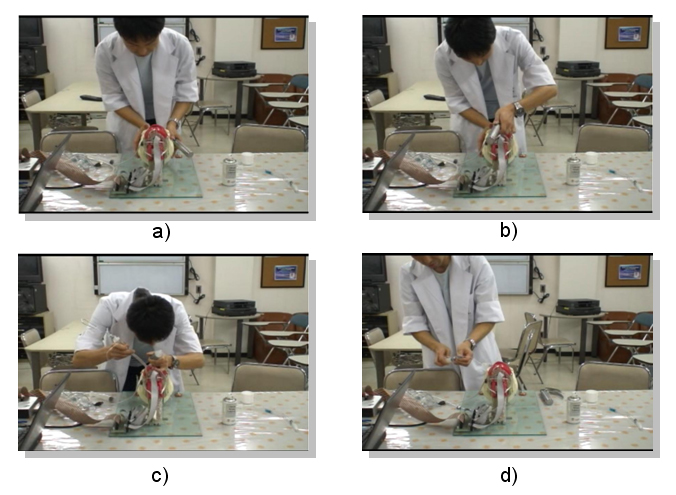
a) 1st Step: Optimal Position of head and neck
b) 2nd Step : Inserting of Laryngoscope into oral cavity, 3rd Step: withdrawal
of the laryngoscope
c) 4th Step: Inserting of endotracheal tube into vocal card
d) 5th Step: Positioning of the endotracheal tube e), 6th Step: Inflating endotracheal
tube's cuff on the trachea
Fig. 7 Procedure of airway management
Most of the doctors finished tracheal intubation within 30 seconds, but most of the unskilled students were over than 30 seconds(P<0.05). Regarding incisor teeth, anesthetists applied a small amount of force on the incisor teeth,while students applied a large amount of force(P<0.05) In addition, during the withdrawal of the laryngoscope in order to observe the vocal cord, operators press the base of the tongue in order to observe the vocal cord. Through the experiment, we could find that sensor #2 and sensor #5 on the tongue (Fig.8.a,Fig.8.b) have a significant difference between doctors and students(P<0.05).
Regarding vocal cord,we defined the Displacement Index (DI) which is based on the computation of the integral of the absolute value of the first order derivative as in (1).(t:Intuabation time,x:Total displacement of the vocal cords) Both the students and doctors have significant difference on the left side of vocal cords(P<0.05)(Fig.8.f). Using these results,we determined evaluation parameters :Intubation time,incisor teeth,mouth opening,tongue,and voocal cord.
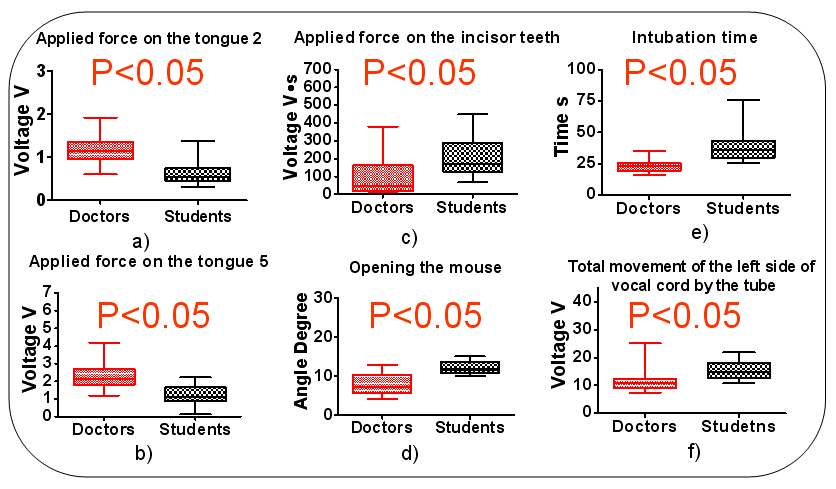
a) Applied force on the tongue 2 b) Applied force on the tongue 5
c) Applied force on the incisor teeth d) opening mouth e) Intubation time
f) Total movement of left side of vocal cord by the tube
Fig. 8 Result of the preliminary experiment with WKA-1