WKA-2
( W aseda K yotokagaku A irway - No. 2 )
Airway management is a basic skill that it is provided during emergency situation such as: cardiopulmonary arrest,
multiple injury, unconsciousness, and general anesthesia. In general, Airway management is not only managed in order
to supply oxygen into the lung but also to prevent the lung from gastric foreign body and bleeding due to an external
wound. Even though it is a basic medical operation, different kinds of accidents (i.e. non-provision of oxygen into
the lung, trauma, and complication by the excessive applied forces on organs) may occur when an unskilled person provides
it.
Moreover, existing patient models(simulators) are different form real human body in many ways,and they can not provide
any kind of the feed back information to the trainee.In addition,once trainees get used to the models,they become
difficult to improve their skill from then on because they can not change their shapes.
Therefore, in order for the trainee to practice efficiently in those cases, we propose Waseda Kyotokagaku Airway-No.2
(WKA-2) which can reproduce the various cases of difficult airway. (Fig.2).
The concepts of this model are following 2 points.
・ WKA-2 can reproduce the various cases of difficult airway and shapes of oral cavity.
・ WKA-2 has a structure anatomy based on human anatomy.
In order to meet these requirements,WKA-2 has wire drive mechanisms that are implemented based on arrangement of
human muscles around tongue and mandible.(Fig.1).
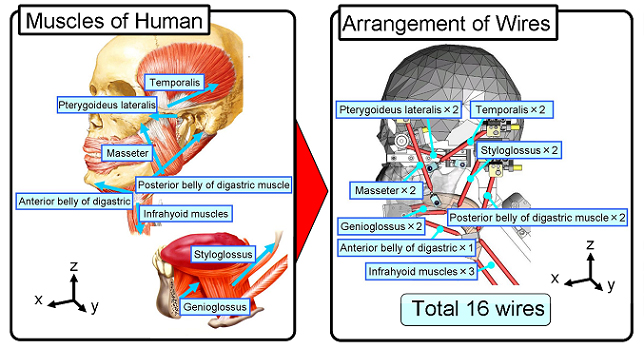
Fig. 1 Arrangement of muscles |
2.Mechanisms
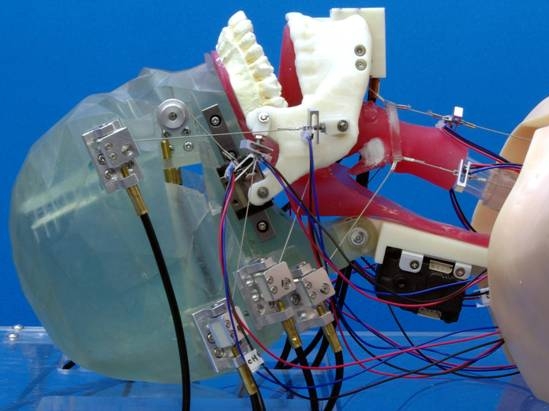
2.1 WKA-2
WKA-2 has wire drive mechanism that are implemented based on the arrangement of human muscles with respect with the tongue and mandible in anatomy (Fig.2), and 16 tension sensors for the virtual compliance control.
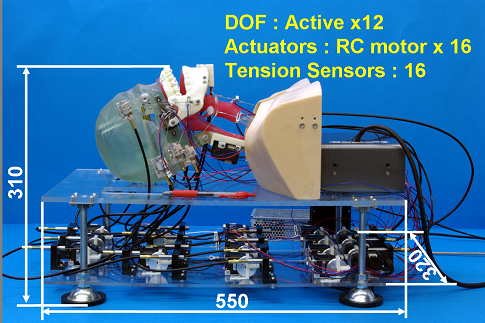
Fig.2 WKA-2(
Waseda
KyotoKagaku
Airway No.
2)
2.2 Wire drive system
2.2.1 Flexible direction unit
In order for the mandible and tongue to change their position, it is required to change the length of each of wires which are connected on the mandible and tongue. At this time, each of the wire's angle which is connected on the mandible, and the tongue changed. Every time they changed their motion, the direction of wires also changed. According to change the length of the wires, it is required to change their direction. For the reason of this, we develop a assistant mechanism for wire drive system(Fig.3).
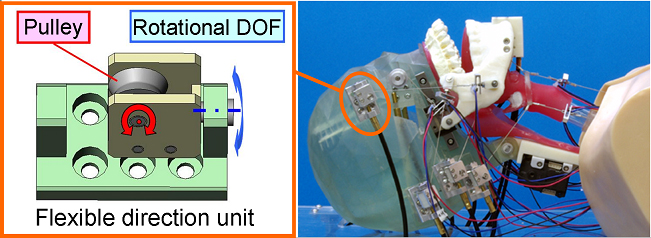
Fig.3 Flexible direction unit
2.2.2 Bearing unit
According to change the wires which connects the mandible and the tongue, the direction of wires changed. In order to change their direction according to change the direction of the wires, it is required to have a degree of freedom passively. Therefore, we developed a bearing unit which can rotate with respect to rotation axis passively, and transmit power perfectly by the wires(Fig.4).
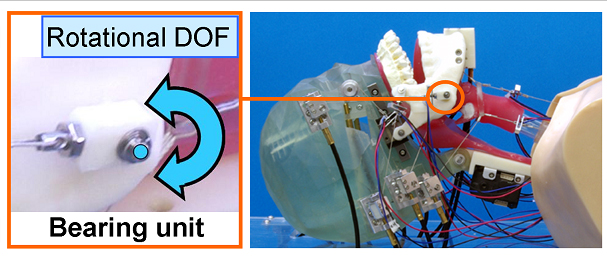
Fig.4 Bearing unit
2.2.3 Tension sensor
In order to measure the applied tension, we have designed the tension sensor.This sensor uses photo interrupter.When the distance between the photo interrupter and the white reflective paper become farther, the electric current that flows inside the phototransistor will decrease.And then, we measured the relation between the output voltage and the applied tension. By using this data,we can read out the tension of wire by the cange of the electric current(Fig.5).
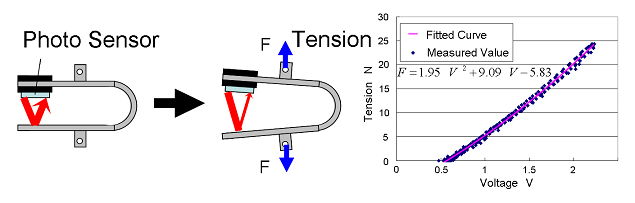
Fig.5 Tension sensor
3.Movement of WKA-2
WKA-2 can reproduce following movements.WKS-2 can reproduce various situations by combining these movements.
|
|
|
|
▲Go to Page Top
4.Future work
Since 2006, we developed WKA-1 which embeds sensor systems to evaluate the skill of airway management. This is a specialized
model for evaluation.
On the other hand,Since 2007,we developed WKA-2 which embeds actuators ,and has wire drive system to reproduce various
situations for airway management training. This is a specialized model for movement.
As a future work, we are planning to establish airway management training with these models,and develop a new model
which has both evaluation and movement systems.
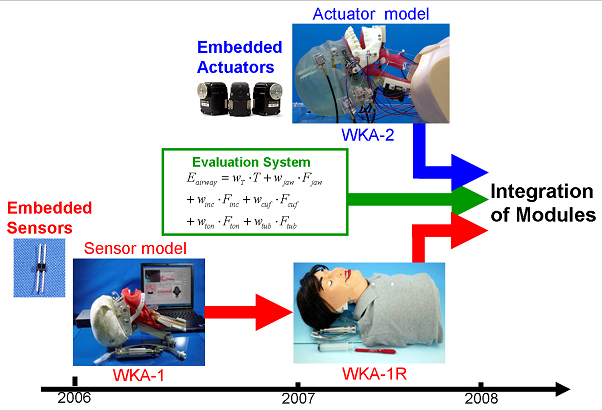
Fig. 6 Research Roadmap |