WKA-2
( W aseda K yotokagaku A irway - No. 2 )
現有のモデル(シミュレータ)は実際の人体とは異なる点が多く,また訓練者へのフィードバックも少ない.さらに,モデル形状を変えることが出来ないため,そのモデルに慣れてしまうと,それ以降の技術の向上が困難となる.
そこで,2007年度には,口腔形状の変化が気管挿管手技に与える影響を調査し,モデルによる訓練方法を確立するため,動作に特化したモデルであるWKA-2を開発した.
このモデルのコンセプトは以下の2点である.
・ 気管挿管困難症と多様な口腔形状の再現が可能な構造とする.
・ 解剖学的見地にもとづき人体構造に近づける.
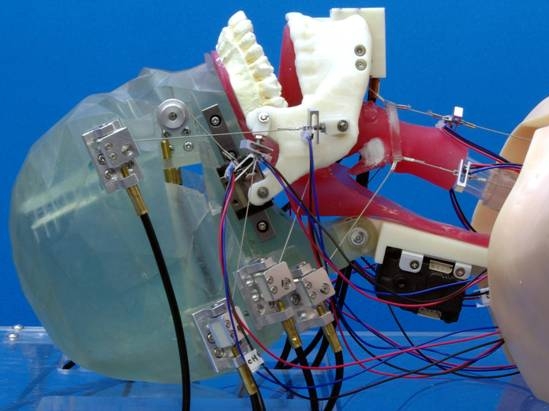
これらの条件を満たすため,ヒトの筋を模したワイヤによって動作を行なわせることを考えた(Fig.1).
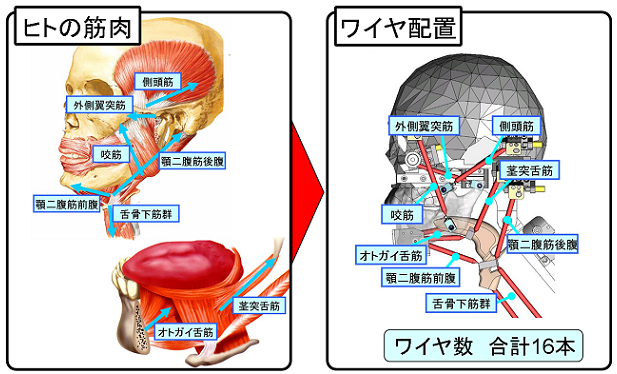
Fig. 1 Arrangement of muscles |
2.機構
2.1 WKA-2
気管挿管訓練用頭部モデルWKA-2は,16本のワイヤを用いて12自由度動作を行なう(Fig.2).なお,動作部位は気管挿管に多大な影響をおよぼす舌と,舌の動作に影響する下顎の2箇所である.
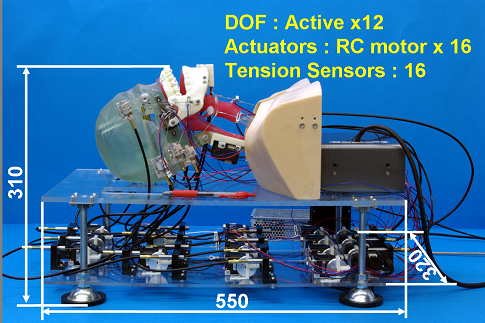
Fig.2 WKA-2(
Waseda
KyotoKagaku
Airway No.
2)
2.2 ワイヤ駆動機構
2.2.1 ワイヤ方向対応ユニット
下顎,舌を動作させるためには,ワイヤ長を変化させる必要があるが,このとき同時にワイヤの角度も変化してしまう.したがって,角度の変化に対応するため各部にプーリを取り付けた.特に頭部プーリには,キャスタのようにプーリの接線を軸とする回転自由度を持たせた(Fig.3).これは,一部のワイヤは動作部分と同一の運動平面上に無いため,プーリを固定してしまうと,角度の変化に対応できなくなるからである.
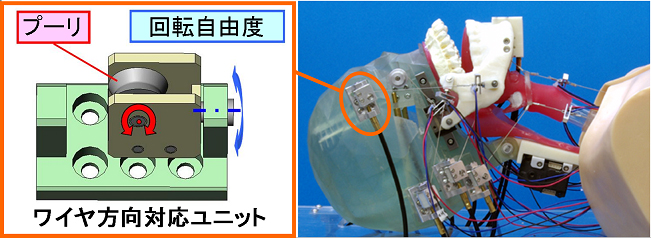
Fig.3 Flexible direction unit
2.2.2 ベアリングユニット
下顎とワイヤの連結部には,受動的な回転自由度を持たせた(Fig.4).この機構と上記の補助機構によりワイヤに加わる摩擦の変化を小さくし,ワイヤによる動力を正確に伝達する事が可能となる.
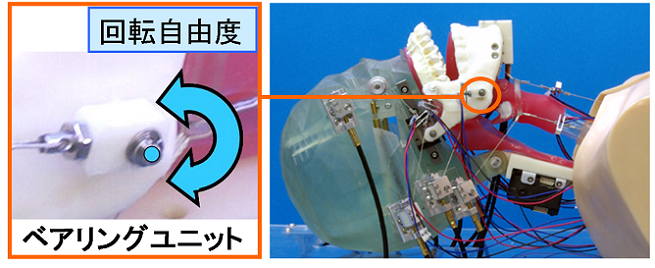
Fig.4 Bearing unit
2.2.3 張力センサ
各ワイヤには張力センサが取り付けてあり,ワイヤにかかる張力が取得可能になっている.このセンサはフォトカプラを利用しており,距離の変化に応じて電流の値が変化する.よって,位置と力の関係を調べておけば,電流値の変化により張力を読み取ることが可能となる(Fig.5).
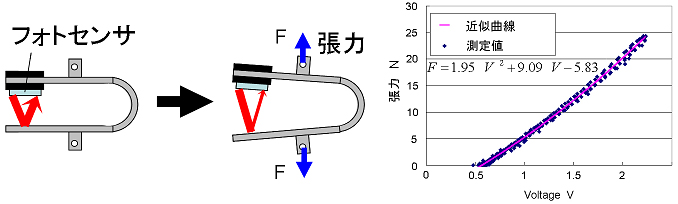
Fig.5 Tension sensor
3.動作
WKA-2は以下のような動作を行なうことができます.これらの動作を組み合わせることにより,様々な状況を再現することが可能となります.
|
|
|
|
▲ページトップ
4.今後の展望
2006年度より開発を開始したWKA-1は気管挿管手技の評価を行うため,各部にフォトセンサを利用した力センサを取り付けた評価特化型のモデルである.
一方,2007年度から開発したWKA-2は,様々な状況を再現するため,アクチュエータを取り付け,ワイヤ駆動を行う動作特化型のモデルである.
今後の予定は,これらのモデルを用いて手術手技訓練の方法を確立していくと共に,動作・評価のどちらにも対応したモデルの製作を行うことである.
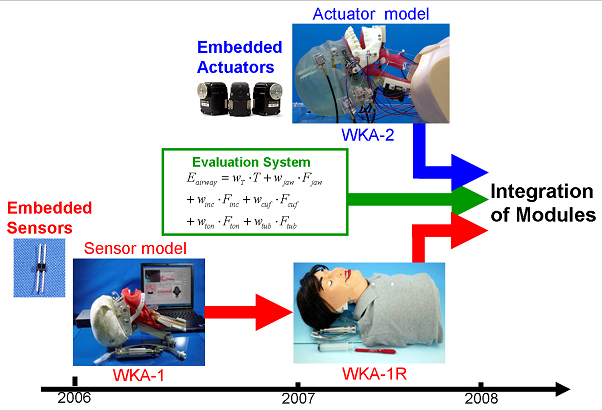
Fig. 6 Research Roadmap |