WKA-3
(Waseda Kyotokagaku Airway-No.3)
Many companies has developed simulators for the medical training, but these simulators can not reproduce real-world condition of the task, can not provide quantitative information of the trainee performance, and only can reproduce limited patterns of the various cases and individual cases. Consequently, the trainee got used to their performance in those simulators, and the trainee’s performance will never be better. As a result of the fact, we will propose a medical training system. Such training system following characteristics: providing quantitative information, simulating real-world conditions of the task, and assuring training effectiveness. In order to fulfill each of the charateristics, we would like to propose an integrated system, Waseda Kyotokagaku Airway No.3 (WKA-3) which enables to obtain quantitative information for the trainee’s performance and reproduce the various cases, individual differences for the airway difficulties and reproduce stiffness of the patient muscle for the simulating real-world conditions of the task. (Fig.1).
 Fig.1 simulator for medical education |
2.Mecahnism
2.1 WKA-3
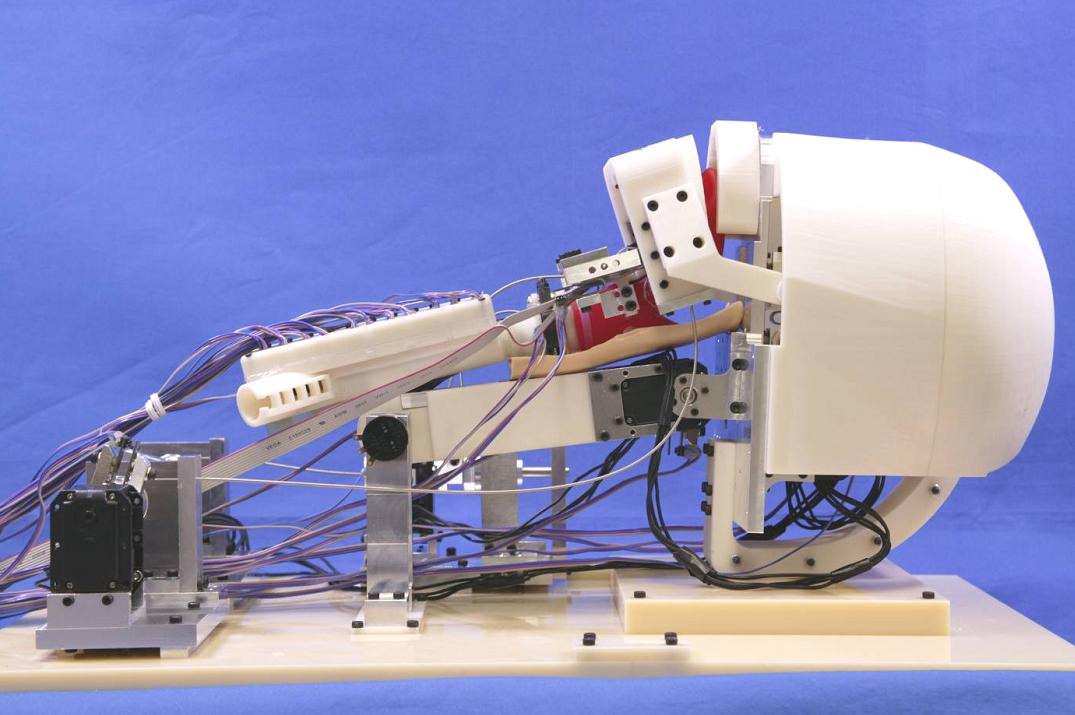
The design concept of the WKA-3 is to reproduce inside and outside of the human, reproduce the stiffness of the human muscle, and enable to measure the quantitative information of the trainee’s performance. For that reason, The WKA-3 consists of 7 parts such neck, mandible, tongue, vocal cord, trachea, head, and oral cavity which is connected with pharynx, larynx, and esophagus as shown in Fig. 2.
Fig.2 WKA-3(Waseda KyotoKagaku Airway No.3)
2.2 Change the stiffness of human's a muscle
2.2.1 Jaw mechanism
Particularly, in case of the mechanism of the mandible of the WKA-3, we adopted a link drive mechanism to reproduce the rotational and translational motion, we embedded force sensors and torque sensors into the link mechanism in order to reproduce the stiffness of the human muscle, and we applied Virtual Compliance Control in the WKA-3. By adjusting virtual compliance coefficients such as damper and spring, we can reproduce a variety of stiffness of the human’s muscles. (Fig.3).
Fig.3 Jaw mechanism
2.2.2 Tongue mechanism
In case of the mechanism of the tongue, the concept of the tongue mechanism focuses on the two points. One is to reproduce the translational motion when operator applies an amount of the force on the tongue. Another is to reproduce a variety of the shape of the tongue such tongue swallowing. For these reason, we propose an under-actuated mechanism which is driven by the wire, spring, and linear guide. By embedding tactile sensors and force sensors on the tongue, we can measure the tactile information and the applied force on the tongue by the medical device which is called laryngoscope.
Fig.4 Tongue mechanism
2.2.3 Sensor system
In case of the mechanism of the force sensor, it consists of four parts such as photo interrupter, reflective white seal, hinge, and U-Shape metal plate. When applying an amount of the force on the hinge, the distance between the photo interrupter and the white reflective seal will be changed. At this time, the light volume emitting form the photo diode of the photo interrupter is reflected by the white reflective seal, and the reflective light volume is absorbed in the photo transistor of the photo interrupter, and the current which flows inside of the photo transistor will be changed according to the reflective light volume. By using calibration device which consists of the high quality of the force sensor, linear guide, and actuators, we can obtain the relationship between the applied force and the output voltage of the photo interrupter. Finally, we embedded the proposed sensors into the driving part of the WKA-3.(Fig.5).
Fig.5 Sensor mechanism
3.Movement of WKA-3
The motions of the WKA-3 are as shown below. By combining these motions, the WAK-3 can reproduce the various cases, the individual differences, and the various situations.
|
|
|
|
▲Go to page top
4.Future work
In 2006, we developed Waseda Kyotokagaku Airway No.1 (WKA-1) which embeds many sensors to acquire quantitative information for the trainee’s performance, and we can evaluate the trainee’s performance from the obtained information. In 2007, we also developed Waseda Kyotokagaku Airway No.2 (WKA-2) to reproduce the various cases, individual differences for the airway difficulties and reproduce stiffness of the human’s muscle for the simulating real-world conditions of the task. Finally, In order to fulfill the function of the WKA-1 and the WKA-2, we developed an integrated system, Waseda Kyotokagaku Airway No.3 (WKA-3). In the future, we will develop a new training system which can simulate real patients for the various medical training.
 Fig. 6 Research Roadmap |