WKA-3
(Waseda Kyotokagaku Airway-No.3)
現有のモデル(シミュレータ)は実際の人体とは異なる点が多く,また訓練者へのフィードバックも少ない.さらに,モデル形状を変えることが出来ないため,そのモデルに慣れてしまうと,それ以降の技術の向上が困難となる.
そこで,2008年度には,様々な口腔形状の変化を再現可能であり,また,手技の計測が可能な気管挿管訓練シミュレータWKA-3を開発した.
このモデルのコンセプトは以下の2点である.
・ より人間らしい動きを再現するため,関節の筋肉を再現する.
・ フォトセンサを使用した力センサの実装.
これらを実現するため,医学書や医師の意見を参考に人間のモデル化を行った(Fig.1).
 Fig.1 simulator for medical education |
2.機構
2.1 WKA-3
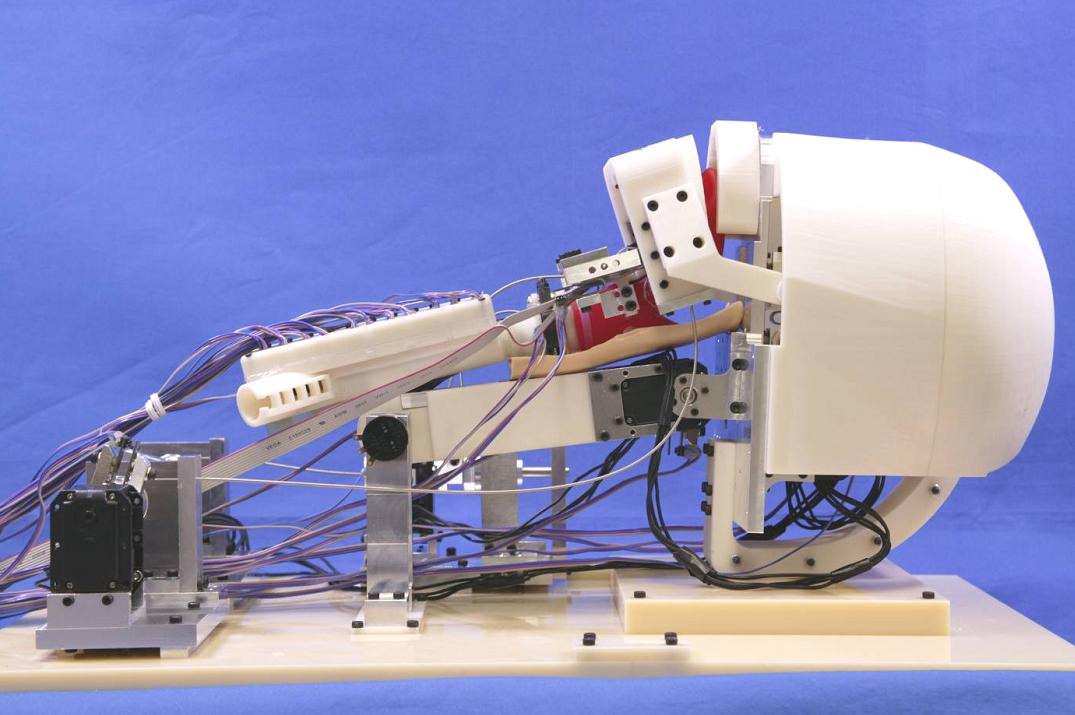
気管挿管訓練用頭部モデルWKA-3は,効果的な訓練を実現することを目的とした全7自由度を有するロボットである(Fig.2).WKA-3は首,下顎,舌,声門,気管を有しており,人間の頭部,口腔内を模擬している.
Fig.2 WKA-3(Waseda KyotoKagaku Airway No.3)
2.2 関節の筋肉の再現
2.2.1 下顎機構
剛性を高めるために,リンク機構をパラレルに配置する設計にした.そのため,下顎の回転運動と直動運動は連動して動作する.また,力センサとトルクセンサを実装しており,訓練者によって下顎にかかる外力を測定し,それに倣って動作する仮想コンプライアンス制御により,人間の関節の筋肉を再現した(Fig.3).
Fig.3 Jaw mechanism
2.2.2 舌部機構
舌はワイヤ張力とばねの力によって駆動しており,スライドガイドや劣駆動型機構で拘束することで,移動と変形を行っている.また,舌部にはタクタイルセンサと力センサを実装しており,喉頭鏡と舌の接触位置,喉頭鏡による舌にかかる力を測定することが可能である.
Fig.4 Tongue mechanism
2.2.3 センサシステム
外力による板ばねの変形をフォトインタラプタによって測定することで力を測定する原理であり,直動方向や回転方向に拘束することで,力センサ,トルクセンサとして,各駆動部に実装を行った(Fig.5).
Fig.5 Sensor mechanism
3.動作
WKA-3は以下のような動作を行なうことができます.これらの動作を組み合わせることにより,様々な状況を再現することが可能となります.
|
|
|
|
▲ページトップ
4.今後の展望
2006年度より開発を開始したWKA-1では手技の測定と評価関数の構築を目指した,評価モデルを製作した.
一方,2007年度から開発したWKA-2では,様々な状況を再現するため,アクチュエータを取り付け,ワイヤ駆動を行う動作モデルを製作した.
それをふまえ,2008年度は動作・評価の機能を統合したモデルの開発を行った.
今後,気管挿管だけでなく,気道管理を含めた総合的なシミュレータの開発を目指す.
 Fig. 6 Research Roadmap |