WKA-4
(Waseda Kyotokagaku Airway-No.4)
本研究は,気管挿管手技を定量的に評価し,その評価を訓練者に対してフィードバックすることが可能な気道管理訓練用頭部モデルの開発に取り組んでいる.気道管理とは,麻酔等により意識を喪失した患者の状態に合わせて最適な器具と手段を選択,実施することにより,肺に酸素が行き届く状態を獲得・維持するという医療行為である.現在,様々な企業から気道管理訓練用シミュレータが販売されている.しかし,事故現場や医療現場で見られる患者の個体差や状態の変化再現でき,手技を定量的に評価可能なモデルは存在しない(Fig.1).
そこで我々は2009年,以下のコンセプトのもと新たな訓練システムであるWKA-4(Waseda Kyotokagaku Airway No. 4)を開発を行った.
・人体構造を忠実に再現するための人体器官の設置
・手技測定のためのセンサシステムの設置
・症例再現のための機構開発
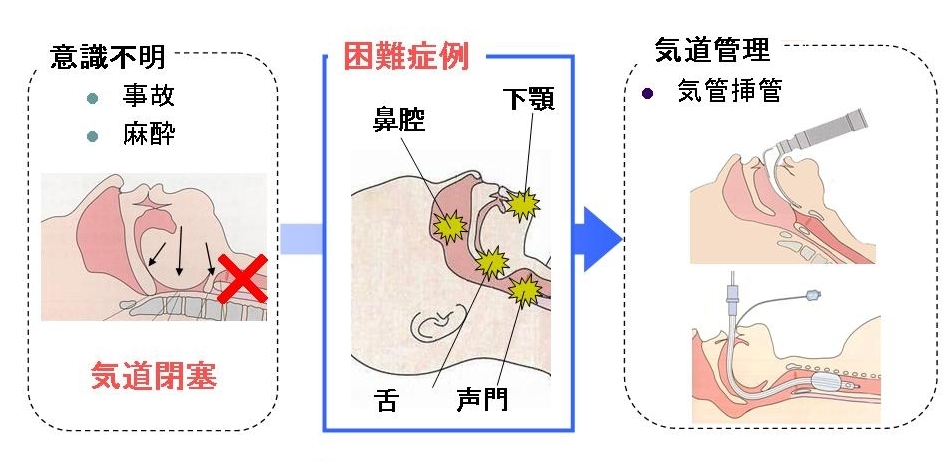 Fig.1 Airway Management |
2. 器官の搭載
WKA-4(Fig.2)は,気道管理に関係する人体器官を全て搭載している.鼻腔部では,鼻腔彎曲状態の再現が可能となっている.また肺部では,カム機構を用いることで,受動的胸壁運動と能動的胸壁運動の両立が可能となっている.これにより,様々な気道管理手技を行うことができる
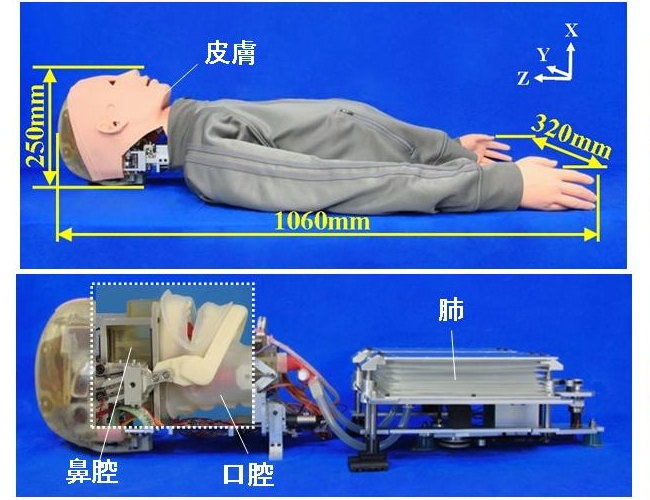
Fig.2 WKA-4(Waseda KyotoKagaku Airway No.4)
3.センサシステムの設置
訓練者の手技を測定するため,またコンプライアンス制御を行うため,各器官に(鼻腔,切歯,下顎,舌,気管),各種センサ(力センサ,トルクセンサ,位置センサ)が取り付けられている.
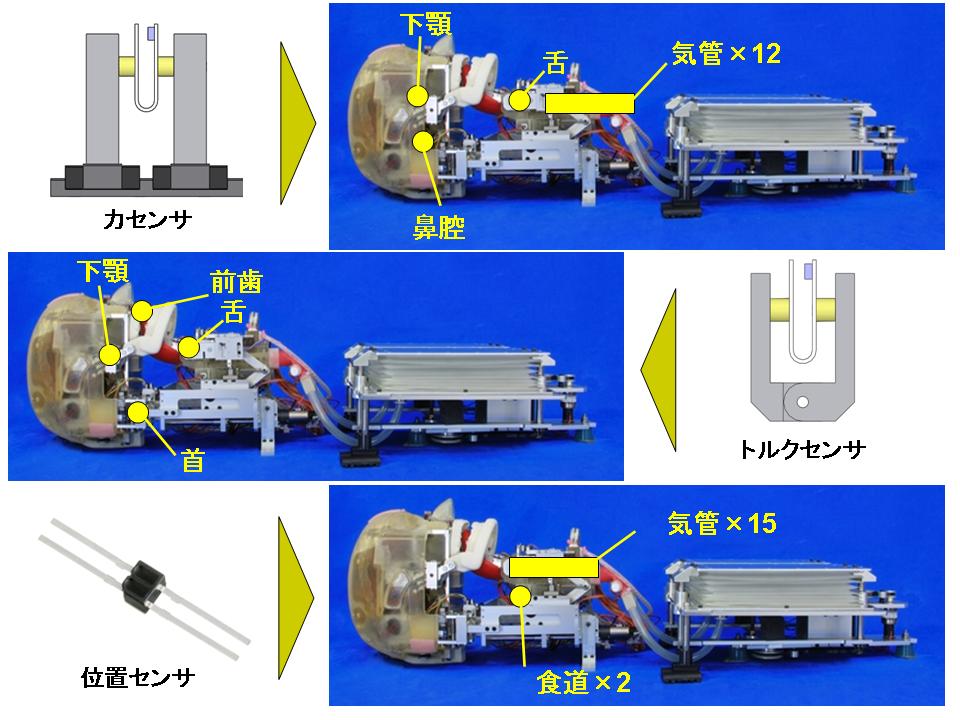
Fig.3 WKA-4 Sensors
4. 機構の開発
WKA-4 は患者の状態再現機能を有し,訓練者は気道管理の困難度合いが異なる状態を体感することが可能となっている.特に下顎部と舌部に関して説明する.
4.1 下顎部
力センサとトルクセンサを用いることで,コンプライアンス制御により筋肉の硬直状態を再現することが可能になっている.またウォームギアによるロック機構を用いることで,物理的な障壁により骨格の異常状態を再現することが可能となっている(Fig.4.1).
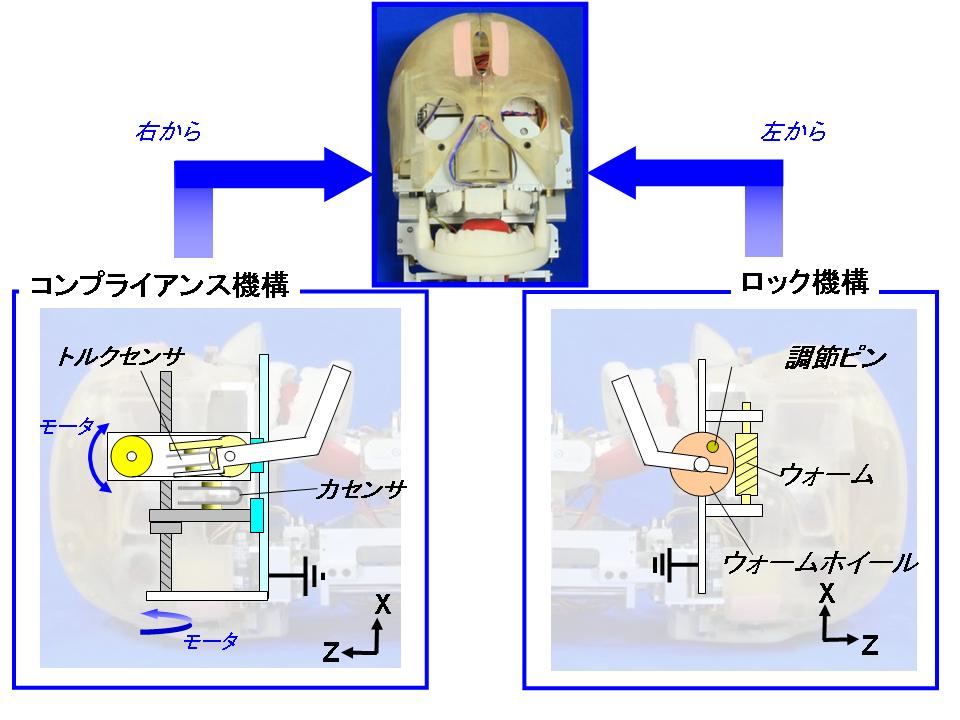
Fig.4.1 jaw mechanism
|
|
|
▲ページトップ
4.2 舌部
舌部では回転自由度を設置することで,舌根沈下の再現が可能となっている.また空気圧を用いることで,伸縮を行い,舌肥大の再現が可能となっている.(Fig.4.2).
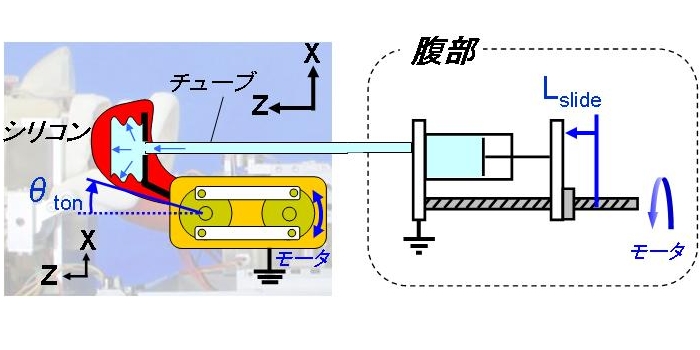
Fig.4.2 tongue mechanism
|
▲ページトップ
5. 実験
実際に医師の方々にWKA-4を使用して頂いた. 以下にその様子を示す.
|
6. 今後の展望
2006年には,訓練用マネキンにセンサを搭載した気管挿管評価モデルWKA-1を作成した.2007年には,アクチュエータを搭載することで症例再現を可能とした動作モデルWKA-2を作成した.2008年には,WKA-1とWKA-2の機能を統合したモデルWKA-3を作成した.
2009年は,WKA-3の機能を拡張し気道管理訓練を可能としたモデルWKA-4を開発した.今後は,必要な機能を取捨選択をおこない,商品化を目指したモデルの開発を目指す.
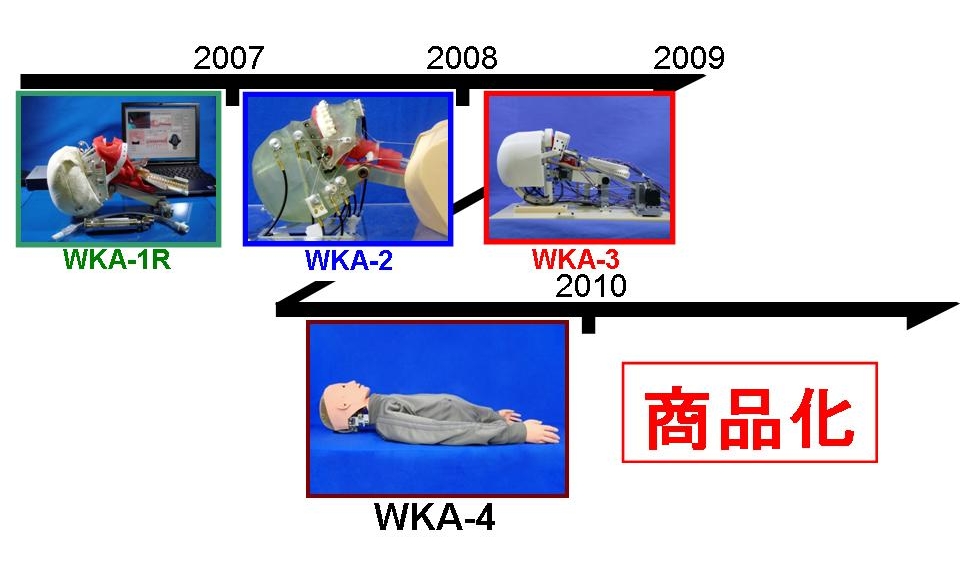 Fig. 6 Research Roadmap |