WKA-5R
(Waseda Kyotokagaku Airway-No.5R)
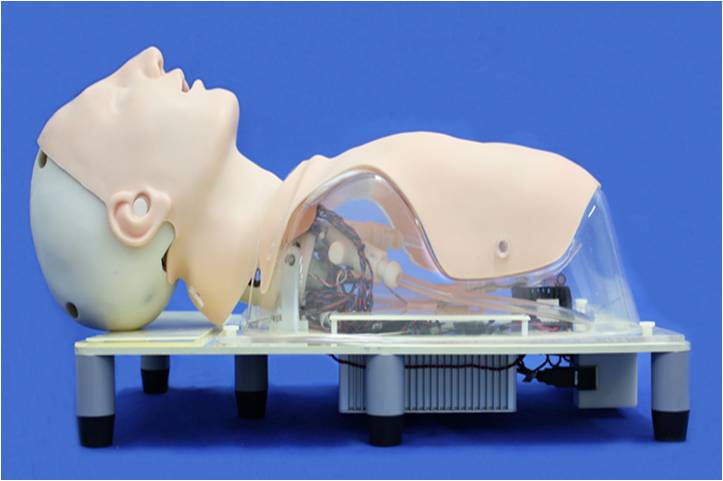
This study reports on the development of an Airway Management Training
System. Airway management is a standard operation executed in
emergency and operating rooms. However, medical accidents occur due to
unskilled operations. In order to avoid accidents, medical doctors
undergo to mannequin-based training. However, traditional training
techniques do not provide quantitative information on the trainee's
performance and are not capable to assess the trainee's performance
based on the quantitative information. In this context, we proposed an
innovative training system which can provide quantitative information
on the trainee's performance and are capable to assess the trainee's
performance based on the quantitative information. From the concept of
the proposed innovative training system, in 2011, Takanishi Laboratory
developed Waseda Kyotokagaku Airway No. 5R (WKA-5R)
・Development of new deformable tongue mechanism
・Development of sensing system in the tongue
 Fig.1 Medical simulator |
2. Mechanism
The difficulty of the airway management depends on the shapes and size of the patient's tongue. In order to reproduce the various patiant's tongues with WKA-5R, we developed two new deformable tongue mechanism. And we developed two sensing systems in the tongue in order to measure the deformation of patient's tongues.
2.1 Deformable tongue mechanism
This shows the tongue mechanism of tongue-swallowing. (Fig.3)
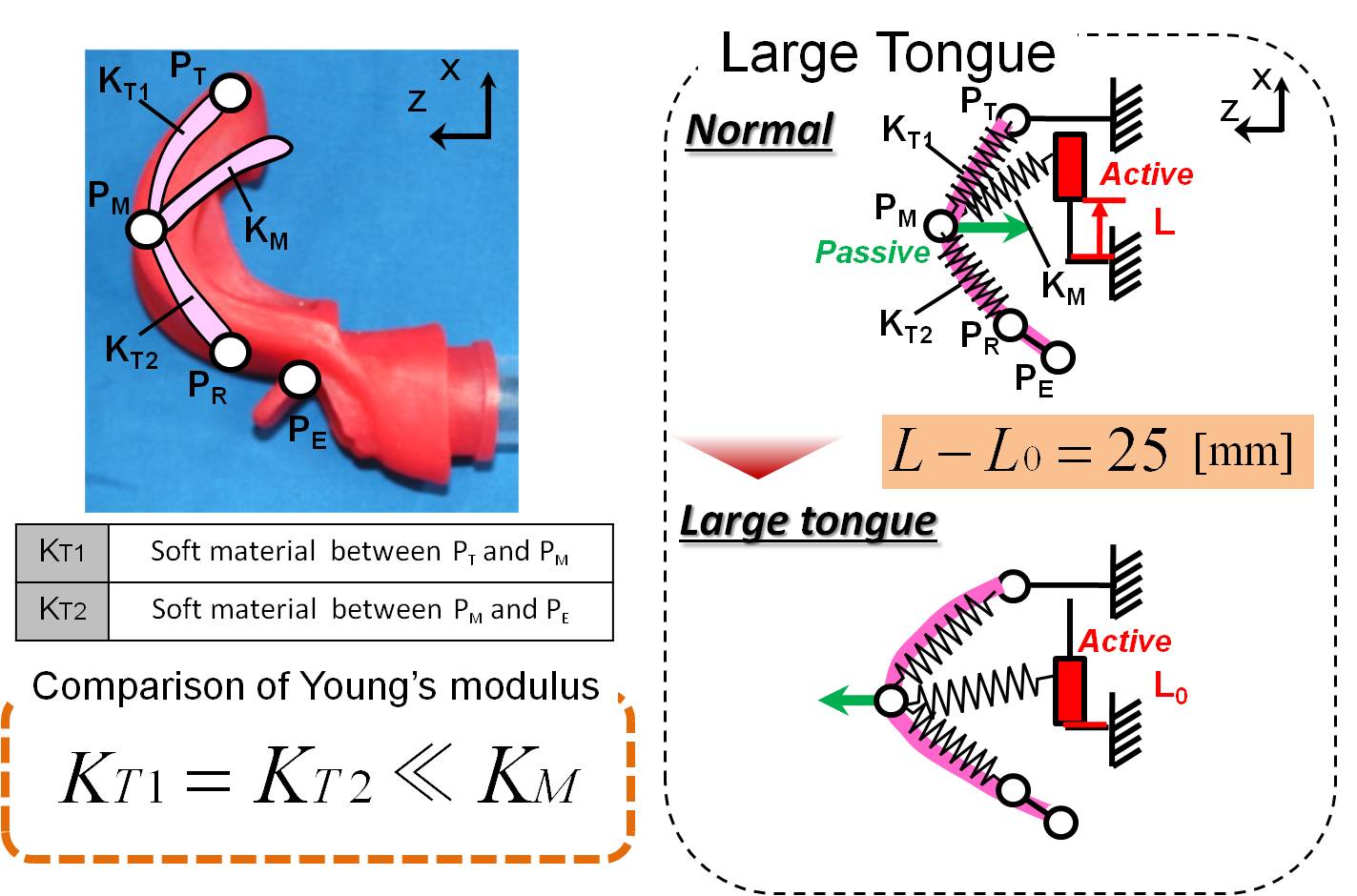
Fig.2 Mechanical modeling of large tongue mechanism
Movement of large tongue(MPGfile,59sec,16.6MB)
This shows the tongue mechanism of large tongue.
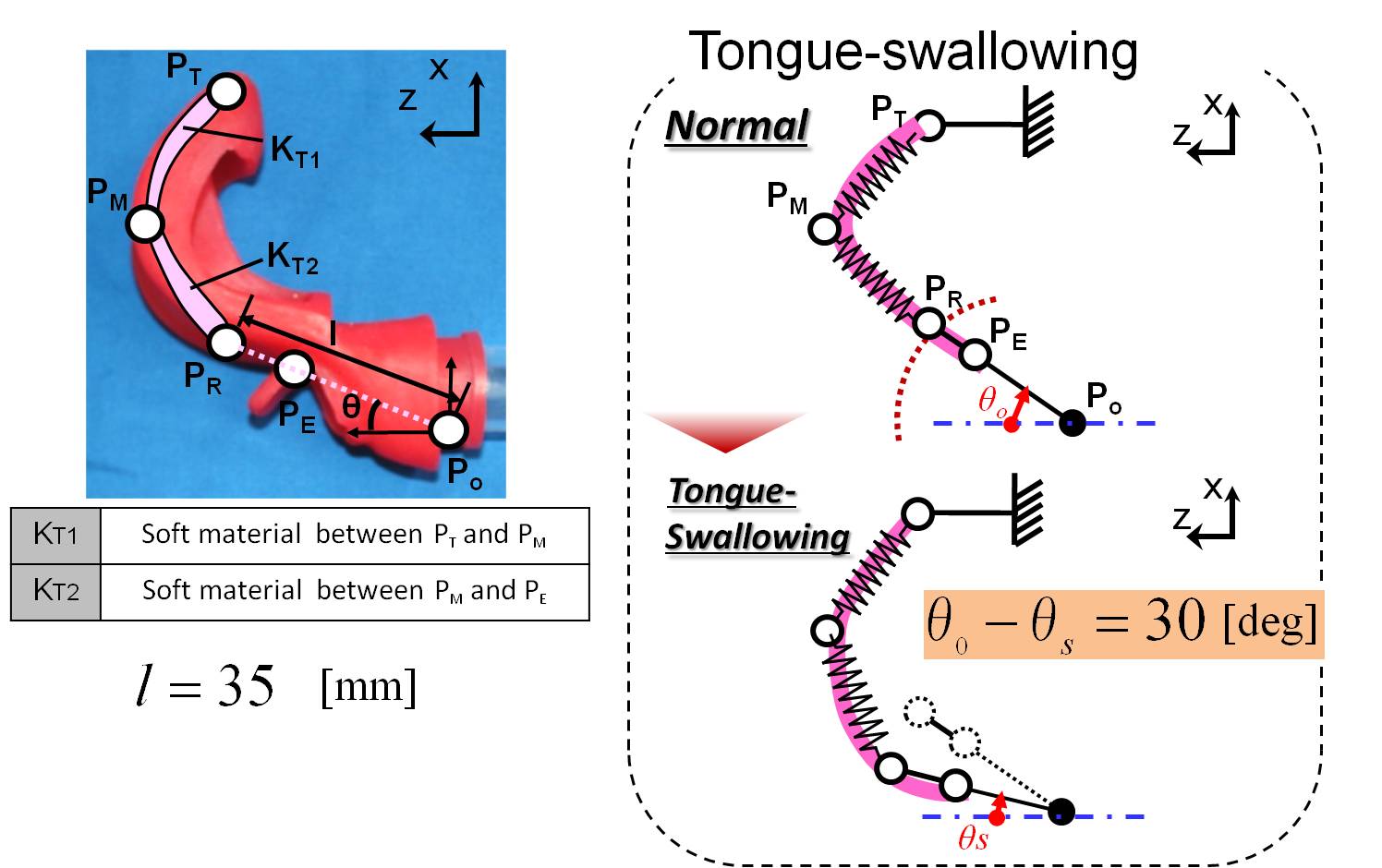
Fig.3 Machanical modeling of tongue-swallowing mechanism
Movement of tongue-swallowing(MPGfile,15sec,2.3MB)
2.2 Sensing system in the tongue
This shows the deformation sensor to measure angle of epiglottis.(Fig.4)
Fig.4 Deformable sensor
This shows the force and position sensor to measure intensity of applied force on each point of the tongue base.(Fig.5)
Fig.5 Force and position sensor
|
3. Movement of WKA-5R
|
4. Future work
By applying the concept of the innovative training system, Takanishi
Lab. proposes a novel and effective airway management training system.Beginning in 2006, Takanishi Lab. have been developing an airway management training system, WKA (Waseda Kyoto Kagaku Airway), which likewise aims for commercialization in the near future. Takanishi Lab.
presented the Waseda Kyotokagaku Airway No. 1 Refined (WKA-1R) which
has embedded sensor systems to provide quantitative information on the
trainee’s performance. In 2007, Takanishi Lab. also developed the
Waseda Kyotokagaku Airway No.2 (WKA-2) in order to reproduce airway
difficulties such as various cases and individual difficulties in
order to simulate the real-world conditions of the task. In 2008,
Takanishi Lab. also developed Waseda Kyotokagaku Airway No.3 (WKA-3)
which has 6 embedded actuators and 56 embedded sensors. These sensors
cannot only measure quantitative information on the trainee’s
performance, but can also simulate the real world conditions of the
task by applying force control to the system. In 2009, Takanishi Lab.
proposed Waseda Kyotokagaku Airway No.4 (WKA-4), which meets all those
requirements of effective innovative training systems. Particularly,
for the simulation of the motions of those parts as in a real human
being, the WKA-4 improved mechanisms with high-fidelity simulated
human anatomy, and Virtual Compliance Control is implemented to
reproduce the stiffness of the human’s muscles. In 2010, Takanishi
Lab. proposed Waseda Kyotokagaku Airway No.5 (WKA-5), which provided
the high-fidelity simulated human anatomy. In 2011, Takanishi
Lab. proposed Waseda Kyotokagaku Airway No.5R (WKA-5R), which provided
the two tongue deformation mechanism and the two sensing systems in the tongue. We will improve those
mentioned defects of the WKA-5R for better simulation of the real-world
conditions of the task.
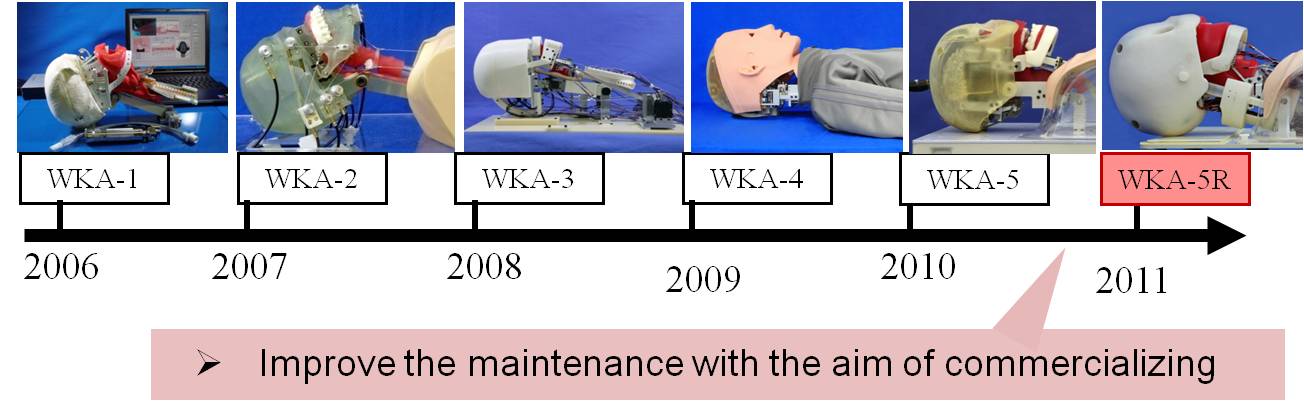 Fig. 6 Research Roadmap |