WKA-5R
(Waseda Kyotokagaku Airway-No.5R)
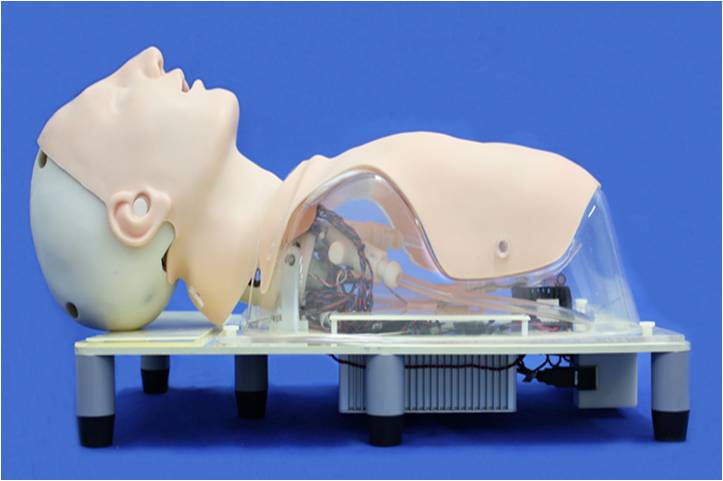
従来の医療手技は,長年の修練と個人的経験により培われた技術であるため,理想的な医療手技に関する明確かつ具体的な指針はいまだに定量的に表現されていない.また近年,医療事故が多発しており,原因の一つとして医師による手技の未熟さがあげられている.そこでわれわれは医師が有する手技を定量的に評価し,フィードバックを行うことで医学トレーニングの効率化が可能であると考え,医学分野と工学分野の連携による医学教育用ロボットの研究開発を開始した.(Fig.1).
2011年,以下のコンセプトのもと新たな訓練システムであるWKA-5R(Waseda Kyotokagaku Airway No. 5R)の開発を行った.
・新舌症例再現機構の開発
・舌部におけるセンシングの開発
 Fig.1 医療教育用シミュレータ |
2. 機構
気道管理手技では患者の舌状態が手技の難易度に大きな影響を及ぼす.そこで,WKA-5R では患者の様々な舌の困難症例(舌根沈下・舌肥大)を再現するための新型舌変形機構を製作した.また手技中の舌の変形状態を検出するための変形センサを製作した.以下,この2点について説明する
2.1 舌変形機構
まず舌肥大を再現する機構について説明する(Fig.2)
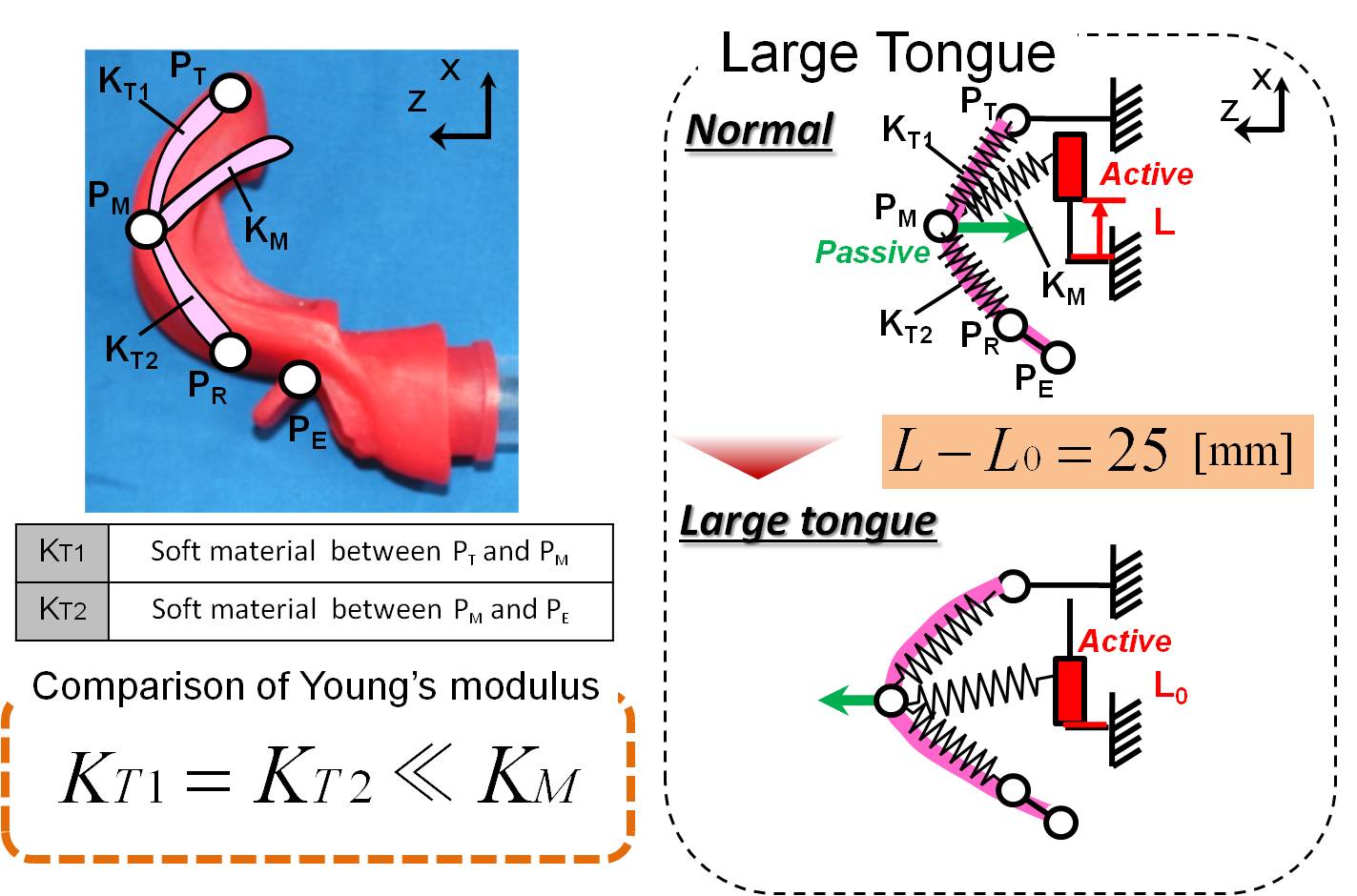
Fig.2 舌肥大再現機構のメカニカルモデル
続いて舌根沈下状態を再現する機構について説明する(Fig.3)
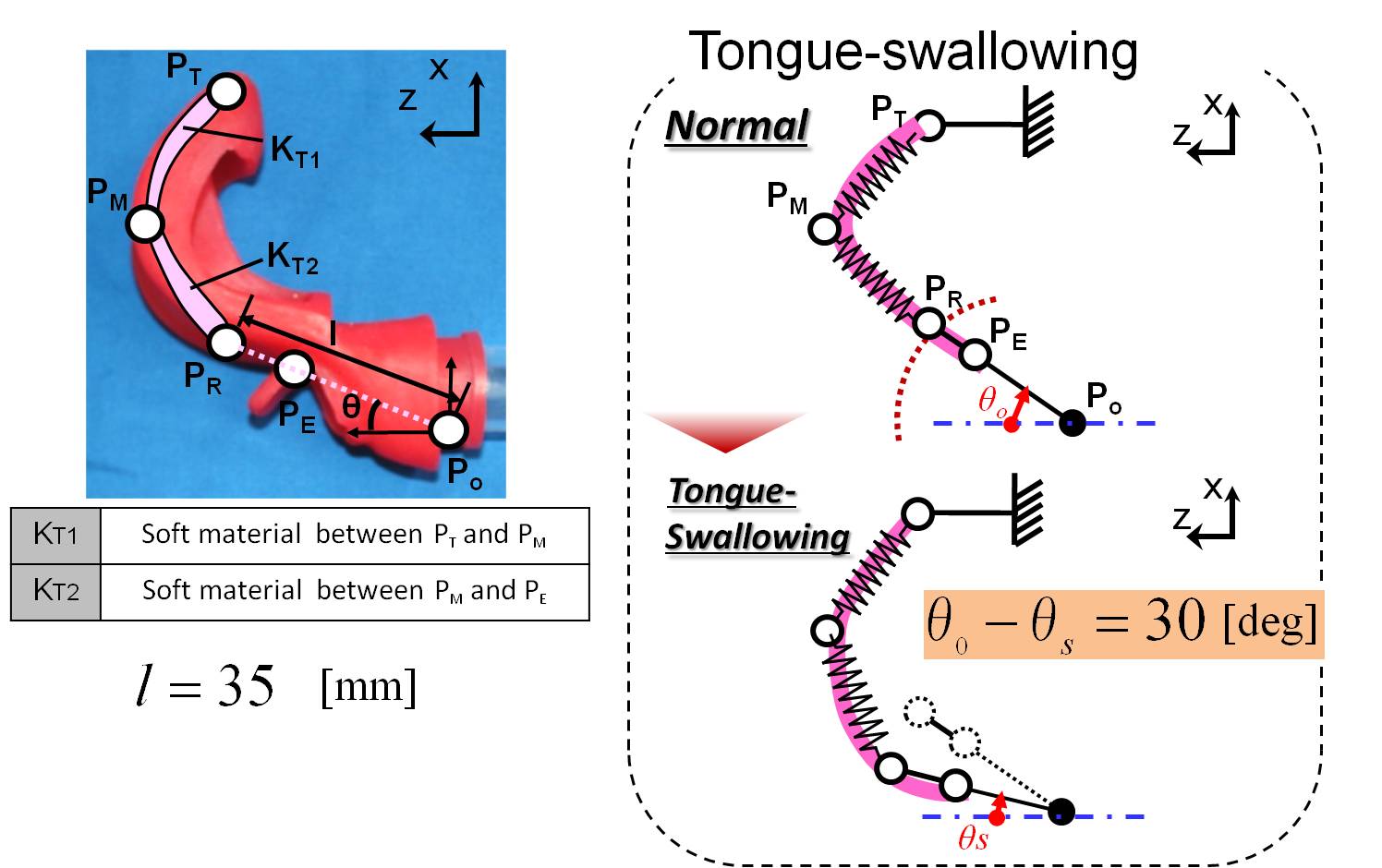
Fig.3 舌根沈下再現機構のメカニカルモデル
2.2 舌変形センサ
まず喉頭蓋の挙上量を検出するセンサについて説明する.
Fig.4 喉頭蓋挙上量センサ
次に舌上の荷重点を検出するセンサについて説明する.
Fig.5 舌部荷重点センサ
|
3. 訓練中の動作
|
4. 今後の展望
2006年には,訓練用マネキンにセンサを搭載した気管挿管評価モデルWKA-1を製作した.2007年には,アクチュエータを搭載することで症例再現を可能とした動作モデルWKA-2を製作した.2008年には,WKA-1とWKA-2の機能を統合したモデルWKA-3を製作した.2009年は,WKA-3の機能を拡張し気道管理訓練を可能としたモデルWKA-4を開発した.2010年には成人男性と同程度の大きさの頭部を有し,患者の症例をより精緻に再現することが可能な気道管理訓練用ヒューマノイドWKA-5を製作した.
2012年には,従来のモデルで問題となっていた舌部の触感を改善し,また新たに舌変形センサの機能を追加した気道管理訓練用ヒューマノイドWKA-5Rを製作した.今後,商品化を目指したメンテナンス性の向上を行う.
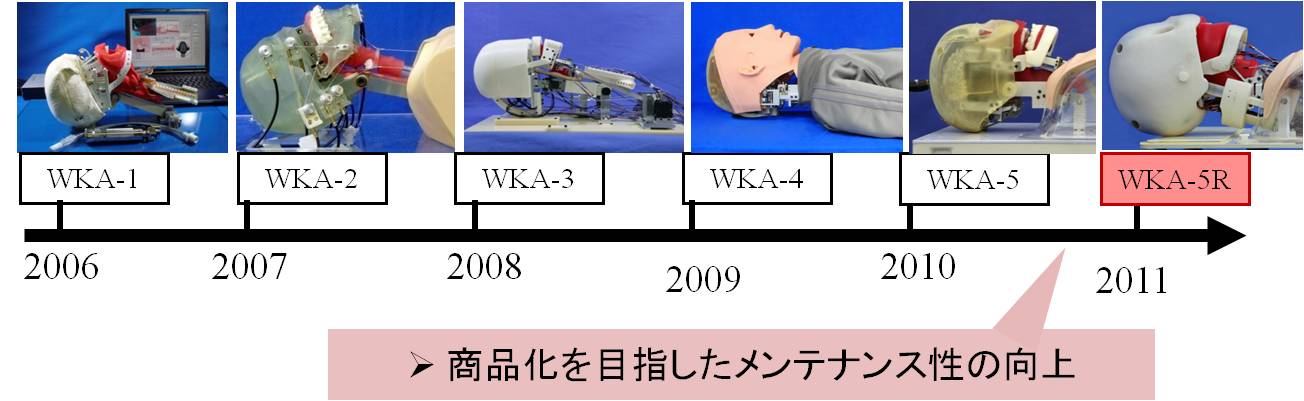 Fig. 6 Research Roadmap |