WKE-1
(Waseda Kyotokagaku Elbow-No.1)
1. Introduction
Cranial nerve system is composed of twelve pairs of nerves. It is an important constituent part of human neurological system. All the sub parts of the cranial nerve system are responsible for particular functions such as smell, vision, facial movements, eye movements etc. As one part of neurological examination, cranial nerves examination is performed to early diagnose the sickness on the pathway of cranial nerve system. Different patients’ symptoms indicate different kinds of nervous system problems. Cranial nerves examination can help the doctor to identify which kind of neurological deficits the patient have or where the abnormalities are localized.
In order to fluently performance the examination, it requires not only abundant medical knowledge but also adept skills. All the medical students, especially the novices need to be trained and master the necessary knowledge and diagnosing methods. In the traditional way of education, firstly, the trainee will systematically learn on the theory knowledge from books. At the same time, the video relative to the symptoms and diseases is also shown to the student. Although this common education method provides the student abundant knowledge and makes them have a good understanding on the physiological relationships of the nervous system, the student can not get the same practical experiences as performing with the real patient.
With the developing of robotic technologies, more and more training simulators focusing on medical skills practicing were developed. Robotics is wildly used in these platforms. Practicing on the simulators, the trainees can enhance their skills quickly. In the simulators, various sensors are embedded in the robot to collect and feed back the operation information of trainees. They provide an objective assessment based on the quantitative information of the trainee’s performance.
Then, we started to develop the whole body patient robot.
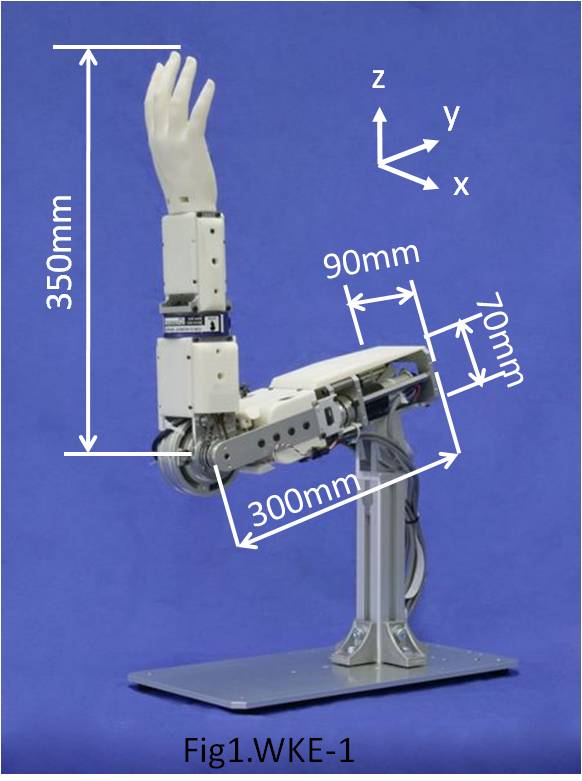
In 2011, as the first step towards the whole body patient robot,a humanoid elbow system for training of neurological examination, named as WKE-1(Waseda Kyotokagaku Elbow No. 1).
▲Top page
2. Mechanism
WKE-1 is showed in Fig.1. The size of WKE-1 is same as the arm of an adult male. WKE-1 has two actuators, non-linear spring and wire for drive mechanism. Moreover, for control and measurement, WKE-1 has an encoder, two tension sensors, two sensors for reflex responses.
▲Top page
3. Monement
The movements of WKE-1 are below.
|
|
|
|
|
|
|
|
|