WKE-2
(Waseda Kyotokagaku Elbow-No. )
1. 概要

2. 機構
▲ページトップ
3. 動作
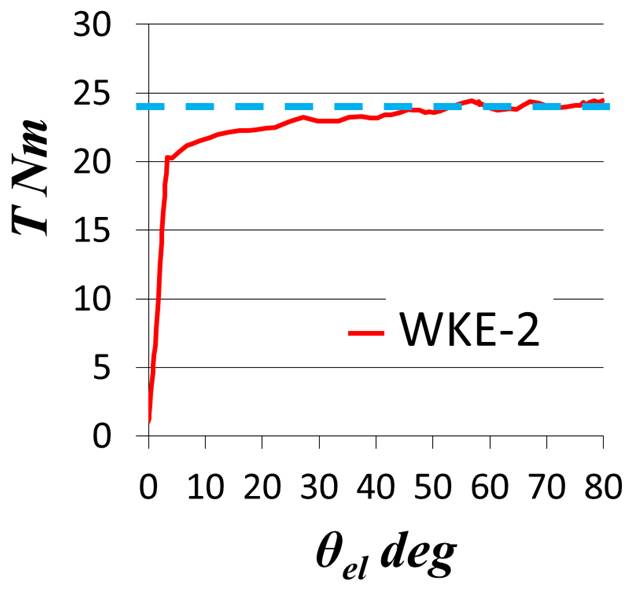
最大発揮状態(高抵抗力)
▲ページトップ
2011年度に開発した神経系診察訓練用上肢シミュレータWKE-1(Waseda Kyotokagaku Elbow No.1)で生じた問題点は以下の通りである.
(1) 成人女性の腕と比べ太い(表1).
(2) 肘部における最大発揮力が不十分.
(3) 肘関節の可動域が不十分.
(4) 駆動系にワイヤを用いているため強度が不十分.
そこで,設計の規範を見直し,肘における神経診察(徒手筋力,筋トーヌス,反射)手技訓練及び、痙攣・振戦動作が可能な肘関節シミュレータWKE-2の開発を行った
▲ページトップ
2. 機構
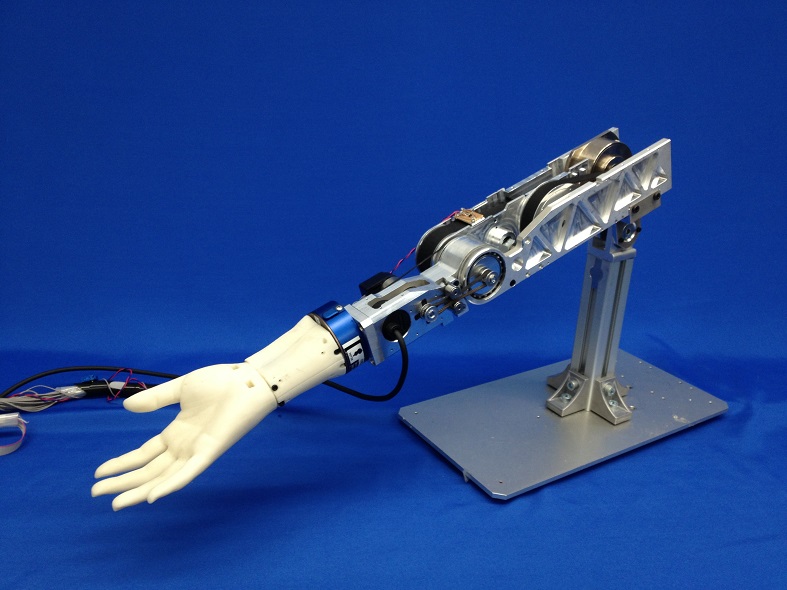
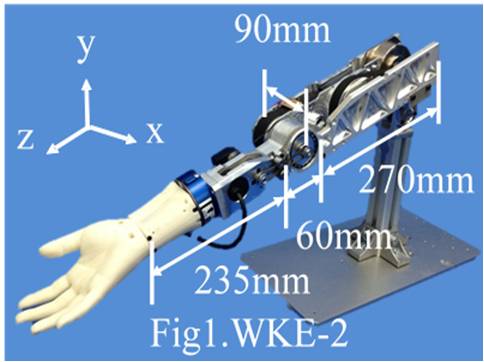
開発した腕モデルをFig. 1,に示す.この腕モデルは,成人女性の腕の大きさを規範としており,また肘関節部分に1つの自由度を有している.具体的にはモータと減速機による痙攣・振戦再現機構と,抗力可変ブレーキによる関節屈曲時の疾患再現機構を直列に接続した機構が採用されている.また腕モデルは,制御と計測の為に各種のセンサを有し,2つのエンコーダ,2つの反射反応センサの計2種類4個のセンサが搭載されている.
▲ページトップ
3. 動作
WKE-2の動作を以下に示す.
脱力状態(低抵抗力)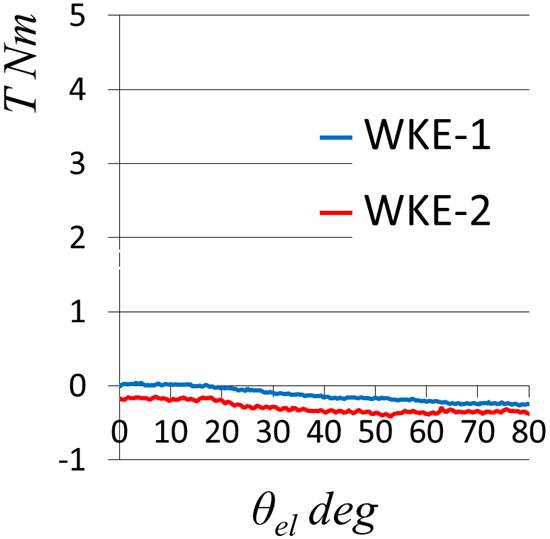
最大発揮状態(高抵抗力)
|
|
|
|
|
|