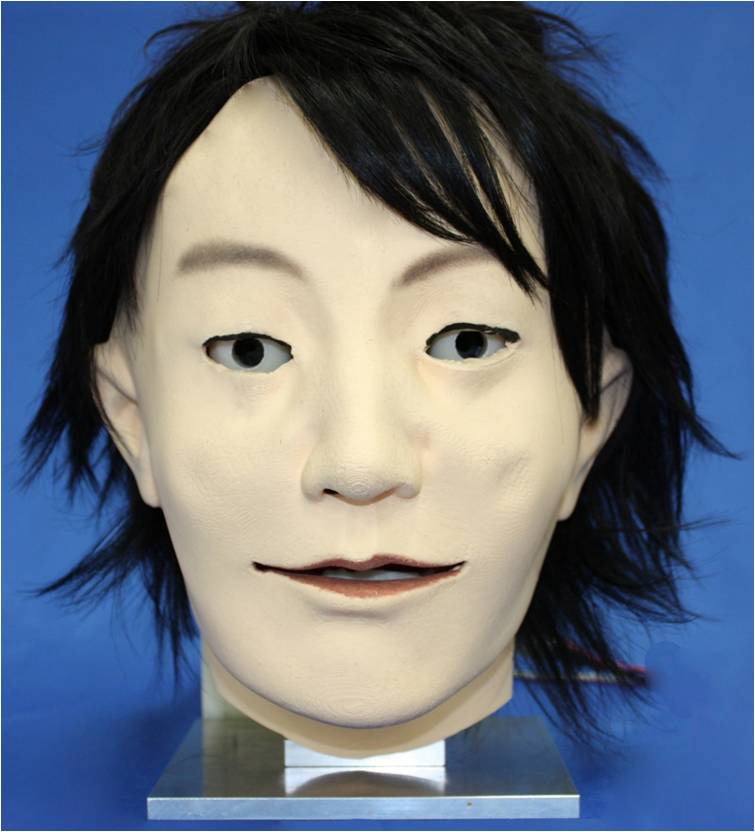
WKH-1
(Waseda Kyotokagaku Head-No.1)
1. 概要
従来の医療手技は、長年の修練と個人的経験により培われた技術であるため、理想的な医療手技に関する明確かつ具体的な指針は、いまだに定量的には表現されていません。また近年、医療事故が多発しており、原因の一つとして医師による手技の未熟さがあげられています。そこで医師の有する手技を定量的に評価し、フィードバックを行うことで医学トレーニングの効率化が可能であると考え、医学分野と工学分野の連携による教育シミュレータ用患者ロボットの研究開発を開始しました。
医療手技にはさまざまなものがありますが,重要な手技の一つとして『神経診察』が挙げられます.神経診察とは,本人や家族における病歴・病気の経過・発症の状況などの問診や,反射や筋力状態などの身体的検査を通じて,患者の病巣とその症状を判断する医療行為です.この医療行為は主に,糖尿病の進行度合や,脳卒中による障害部位・重症度の判断に対して用いられており,正確な診断が望まれています.
実際,現在の世界の医療教育にて導入されておりますOSCE(客観的臨床能力試験)にも医師になる前には必ず網羅しなければならない項目として位置づけられています.しかし,神経診察は訓練を行うことが難しいため,試験自体が行われないことも少なくありません.
その問題を解決すべく我々は体系的・効果的な神経診察の訓練を実現するため,各種患者状態を再現可能な全身型のシミュレータの開発を開始しました.
2011年,全身型患者シミュレータ開発の第一歩として脳神経系診察の訓練に使用可能な頭部ヒューマノイドシステムであるWKH-1(Waseda Kyotokagaku Head No. 1)の開発を行いました.
▲ページトップ
2. 機構
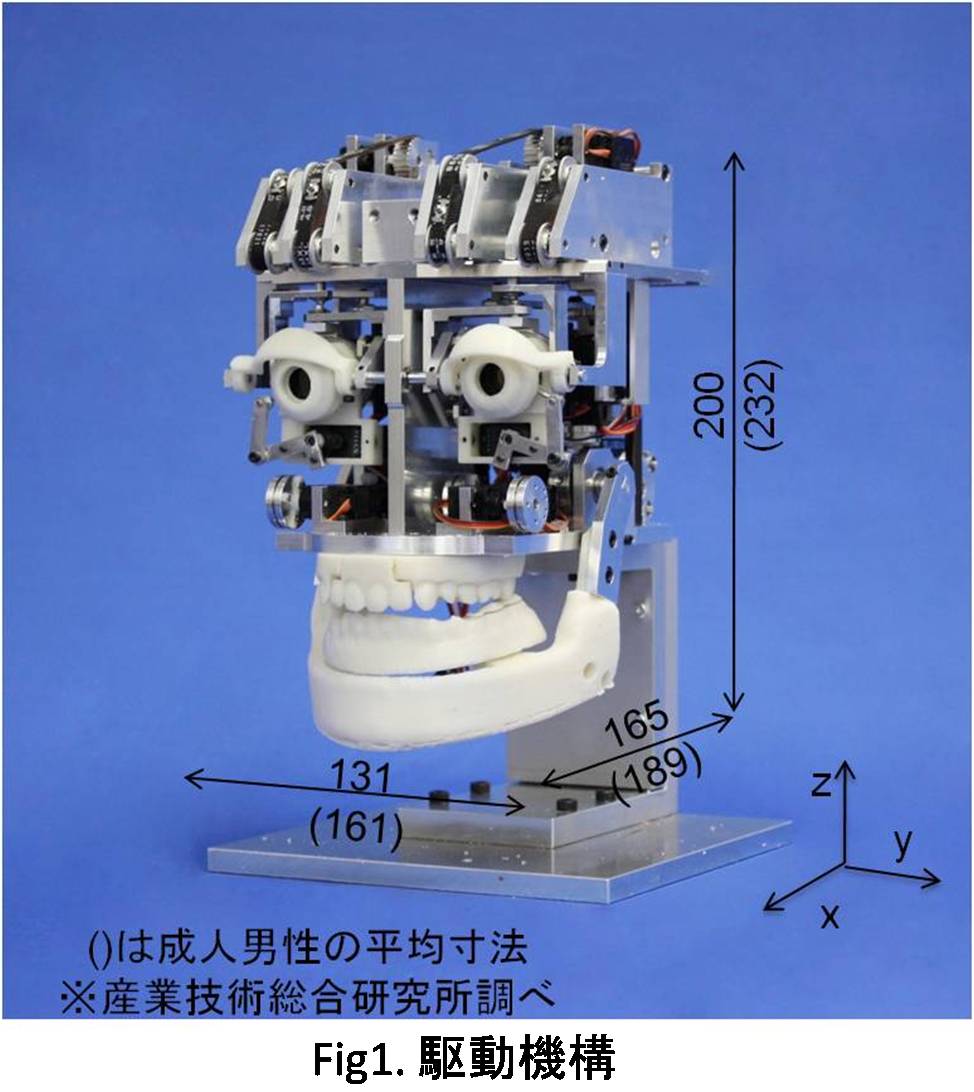
人は主要な11種を含む多様な筋肉を使って表情を形成します.
この内,診察の際に必要な額にしわを寄せる・眼を固く閉じる・口角を上げるという表情において特に重要な役割を担っている前頭筋・眼輪筋上唇挙筋・大頬骨筋をモデル化しました.
そのモデルをもとに実際に製作した機構をFig.1に示します.
▲ページトップ
3. 動作
WKH-1の動作を以下に示します.
健常者 額にしわを寄せる |
|
疾患者(右顔面麻痺)額にしわを寄せる |
|
健常者 口角を上げる |
|
疾患者(右顔面麻痺) 口角を上げる |
|
健常者 眼を固く閉じる |
|
疾患者(右顔面麻痺) 眼を固く閉じる |
|