|
|
1.Introduction
|
1.Introduction
In order to develop a patient robot, at first, we develop a surgery skills training system to evaluate quantitatively a surgical skill.Up to now, several commercial surgery skills training system are available, but all of them don't provide any quantitative information of the training progress.Therefore, the purpose of this study is to develop a surgery skills training system.
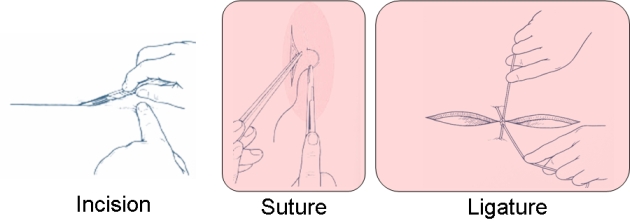
Fig. 1 3 basic elements of skin surgery
2.Concept
In order to acquire information of the performance of trainees, a sensor system was proposed, which embeds an array of photo interrupters under the dummy skin as shown here.
When the distance between photo interrupter and dummy skin becomes closer, the volume of the reflected light becomes larger.
Thus, the electric current that flows inside the phototransistor will increase in proportion to volume of the reflected light.
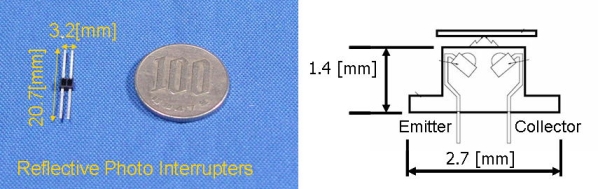
Fig. 2 Reflective photo interrupter
By using this proposed sensor system, we can sense the movement of skin dummy due to the applied force.
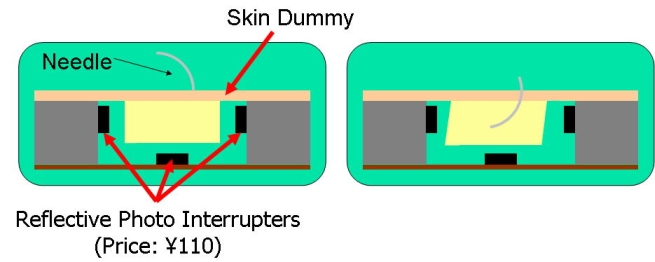
Fig. 3 Sensor basis
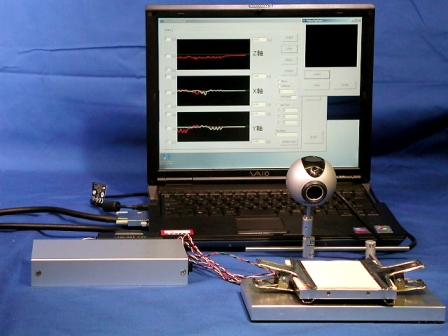
The training system consists of a dummy skin, sensors, a webcam and computer system.
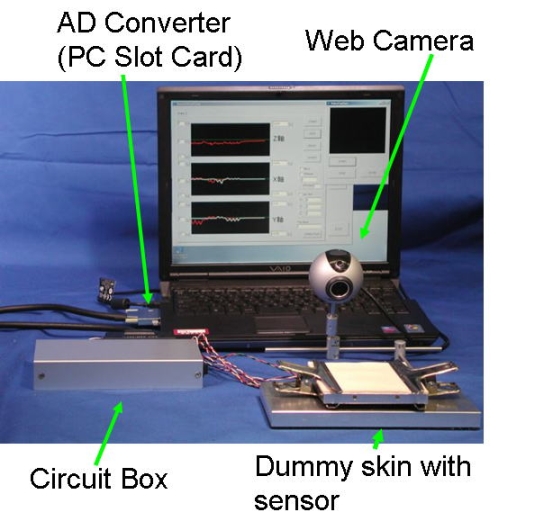
Fig. 4 Overall view
In order to sense the three-dimensional movement of dummy skin,we embedded one photo interrupter under the dummy skin and four photo interrupters perpendicularly on the sides of dummy skin.By using this proposed sensor system, we can sense the movement of dummy skin due to the applied force.The dummy skin is normally used for suture training simulator and it was developed by Kyoto Kagaku co. ltd.; which is a company that produces models and educational medical equipments based in Japan.
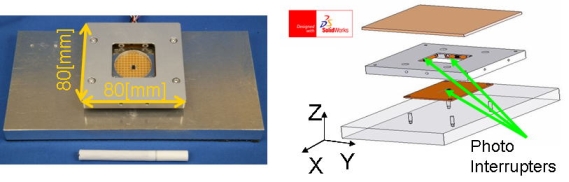
Fig. 5 Sensor placement
3.Evaluation
In order to determine how to evaluate the performance of trainees, we may consider different kind of task parameters; however, up to now, there is no method to determine which of those parameters are important to evaluate surgery skillsAs a first approach, we propose to compare different kind of task parameters from the performance of surgeons and unskilled persons and identify those parameters having a significant difference. The experiments were carried out using the developed surgery skill training system.At First, we consider the suture surgical task.In the medical literature, we can find several kinds of suture methods; however, we focused only to the basic interrupted suture.Based from our discussions with surgeons, we considered as suture parameters the completion Time, needle insertion angle/speed and shear force.
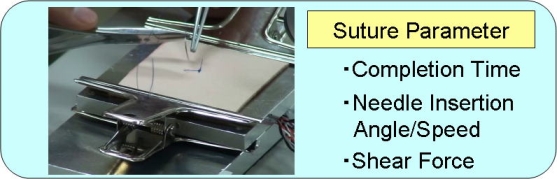
Fig. 6 Suture parameter
Regarding the ligature surgical task, we also find different kind of ligature methods. In this research, we have focused on the instrument tie.Similar to the suture case, we have consulted surgeons and we determined the task parameters of the ligature task as the completion time, force distribution, and optimum force
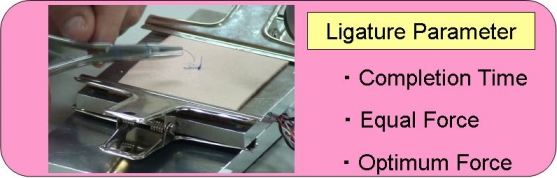
Fig. 7 Ligature parameter
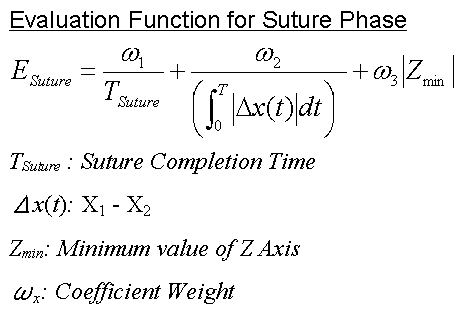
In order to propose the evaluation function of the suture task, we considered a heuristic method. In fact, there is no method up to now to determine how the evaluation function should be determined.As a result, the suture evaluation function is presented like this.The evaluation parameters are the suture completion time, needle insertion angle/speed, shear force.
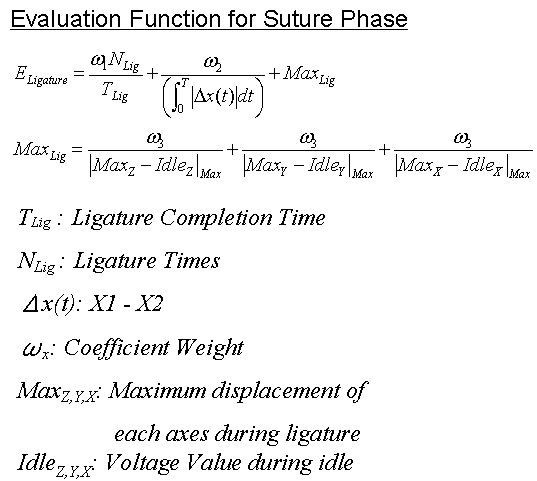
As a result, the ligature evaluation function is presented like this.The evaluation parameters are ligature completion time, equal force, optimum force.
The resulting data for the evaluation scores of all the considered subjects are shown in this figure. The x axis shows the evaluation score of suture and the y axis shows the evaluation score of ligature. From this graph, we can see that by using the proposed evaluation function,we can easily distinguish quantitatively the differences of skills levels among the subjects considered for the experiment.
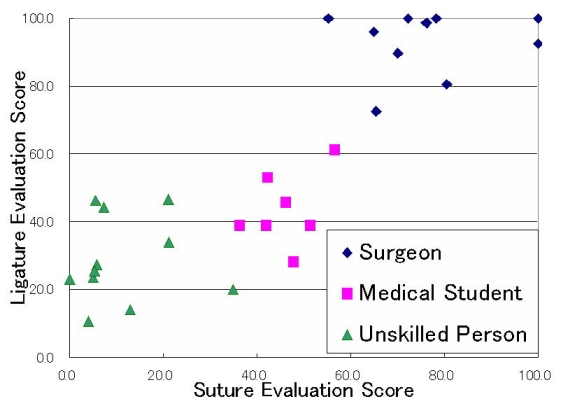
Fig. 8 Evaluation score