|
|
1.背景
|
1.背景
患者ロボットを開発するに当たり,われわれはまず手術手技に着目しました.現在,手術訓練用機器は様々な物が販売されております.しかし,それらのものは訓練を行った後,その手技が良かったか悪かったかなどの判断をすることができません.
そこでわれわれは皮膚手術に多用される切開,縫合,結紮のうち,縫合と結紮に注目し手技の定量的評価が可能な手術手技評価シミュレータの開発と評価システムの構築を目指しました.
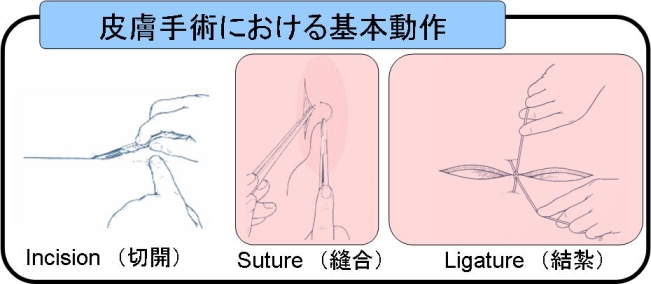
Fig. 1 皮膚手術における基本3動作
2.構成
手技を評価するためのセンサシステムを開発するにあたり,事業化も考慮するとシステムを安くする必要があります.そこで,100円程度で販売されている反射型フォトインタラプタ(Fig. 2)をセンサとして選びました.
動作原理は次のようになっております.発光素子から発された光が物体に反射し,受光素子に入ります.受光量により,流れる電流が変化し,それを電圧降下として利用しました.物体が近づけば反射した光が受光素子に多く入り,逆に遠ざかれば受光量は減ります.つまり,物体の距離により電圧が変化する距離センサとして利用しました.
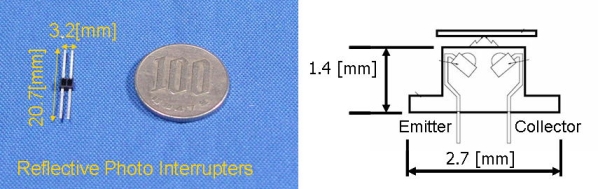
Fig. 2 反射型フォトインタラプタ
Fig. 3のように模擬皮膚を縫うことにより,模擬皮膚が変形し,その変位量を反射型フォトインタラプタが検出します.
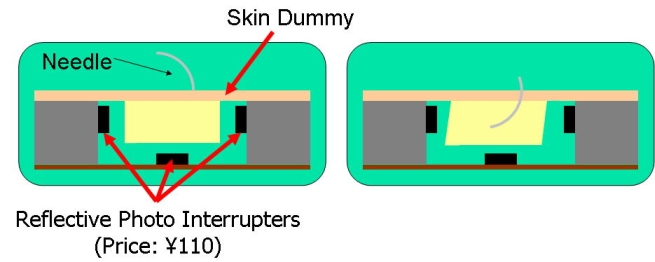
Fig. 3 センサ原理
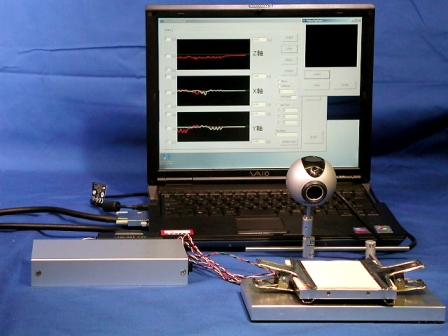
開発したセンサシステムはFig. 4のようセンサ部,回路部,PCにより構成されています.センサ部を縫合することにより,その値を回路ボックスを通してパソコンに入り,データを処理します.Web Cameraは手技の状態を確認,記録するためについています.このセンサシステムはアンプも必要としないため安価なシステムとなっております.
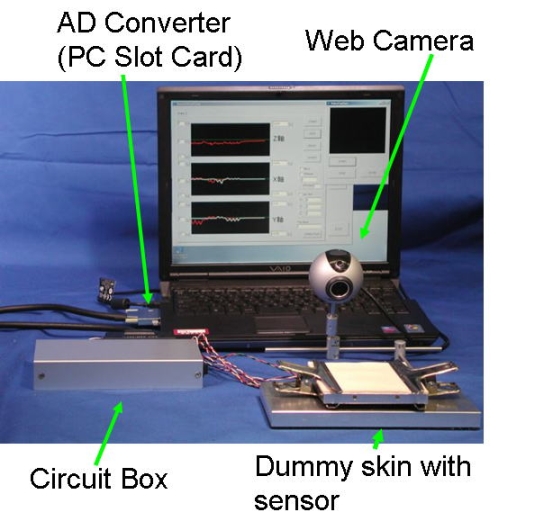
Fig. 4 全体図
Fig.5のようにセンサをX軸に2つ,Y軸に2つ,Z軸方向に1つの計5つ配置することによりXYZの3軸方向の変位を検出します.上に乗せた模擬皮膚は実際に株式会社京都科学で販売されている訓練用模擬皮膚を加工したものとなっております.
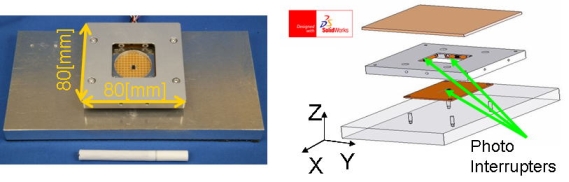
Fig. 5 センサ配置
3.評価
手技を行った際,センサシステムから様々なパラメータを得ることができますが,手技を評価するためにどのパラメータが重要なのか決める手法は存在しません.
そこで我々は医師と未経験者から得られたパラメータを比較し,大きな違いがあるものをパラメータとして選定しました.
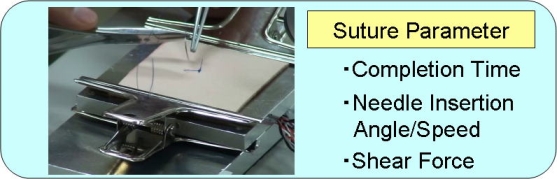
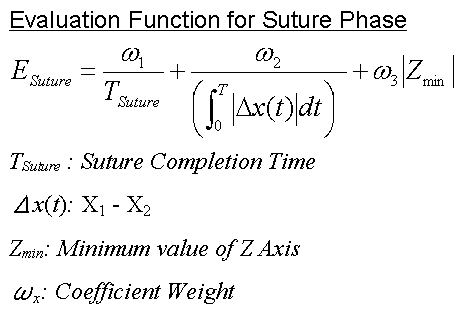
Fig. 6 縫合パラメータ
縫合の評価パラメータとしてかかった時間,針の刺入角度/速度,横方向の変位を選びました.
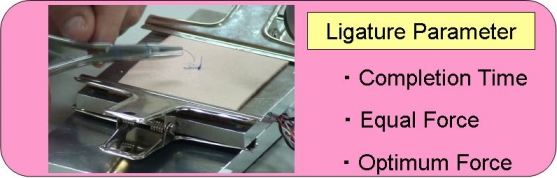
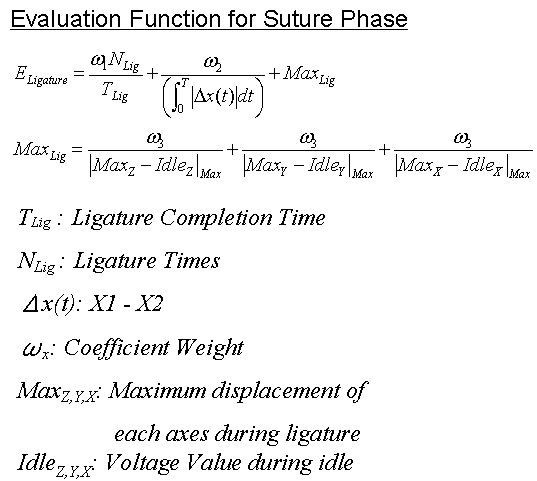
Fig. 7 結紮パラメータ
結紮の評価パラメータとしてかかった時間,両方の糸が均等な力で引くことができているか,かけている力の量を選びました.
得られたパラメータから縫合,結紮の評価関数を構築しました.
以上の評価関数を用いることでFig. 8のように,未経験者,医学生,医師をグループに分けることができました.
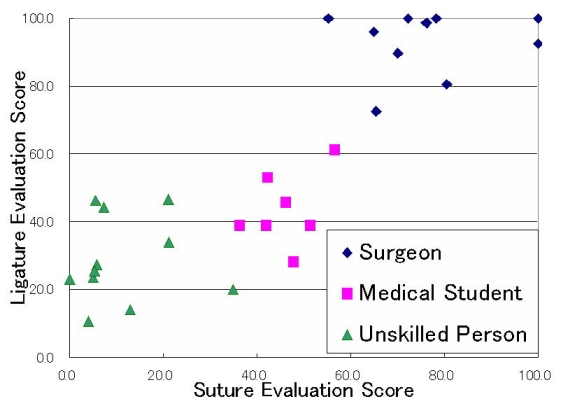
Fig. 8 評価スコア