Anthropomorphic Flutist Robot
WF3-RIX
(Waseda Flutist
No.3-Refined-IX)
|
 Research
Purpose
Research
Purpose
Humanoid, an
anthropomorphic robot, is being developed for practical uses in the human
living environment. We believe that the ability to interact with human
emotionally is important for humanoid robot. Therefore we developed an
Anthropomorphic Flutist Robot WF-3RVIII, which reproduces the functions of
human organs, to interact with human musically and to clarify the mechanism
involved in human flute playing from an engineering view
point.
Former
Research
The development of this
robot was started in 1990.
At first, we developed an accompaniment-system
synchronized by MIDI, and designed
the hardware to do basic musical performances. As the result of these
developments, our robot reproduces every human organ functions as real as
possible. In addition, we have invited a professional flutist as our technical
adviser. Then we have made researches to aim at improvements of expression
power for performances (trilling and vibrato technique) and autonomic systems
of this robot (autonomic tone-searching method).
These days, we researched
on the interactive function between a human and the robot. We can play in
concert with this robot by using the MIDI
instrument.
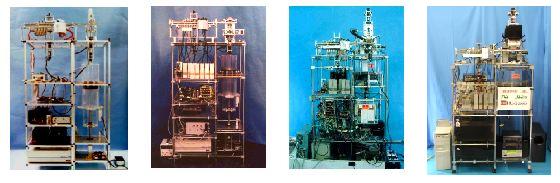 |
| Fig.
1 past WF series |
 |
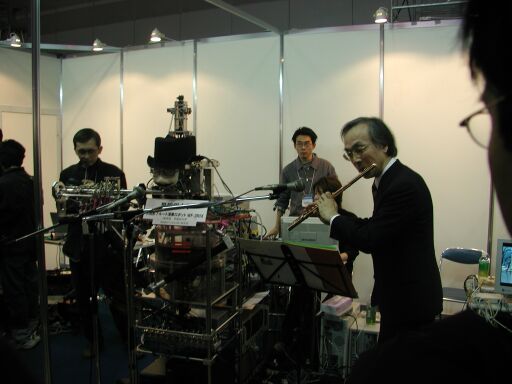 |
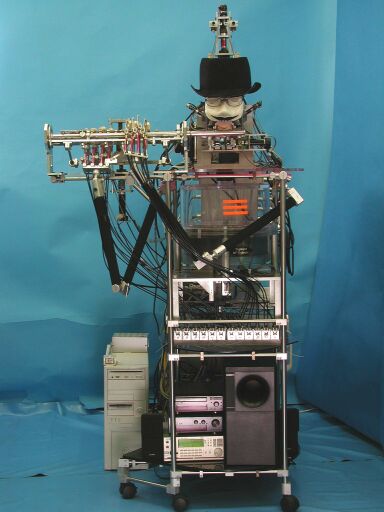
Fig. 2
WF3-RIX
(Waseda Flutist No.3-Refined IX) |
Fig. 3
Mr.Wakamatsu
our technical adviser,
professional flutist and WF3-RIX |
Hardware of this
Robot
This robot has these
hardwares.
 |
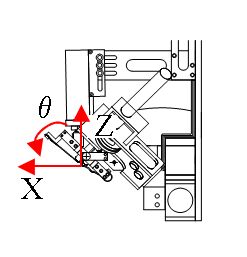 |
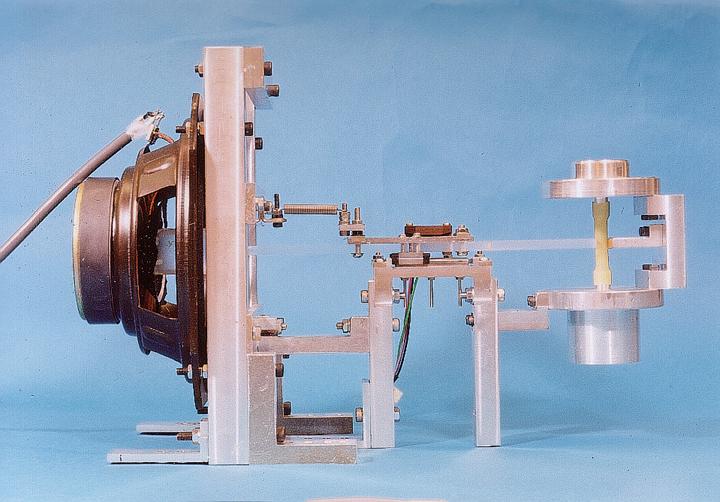
| Fig. 4 Relative positioning mechanism between Embouchure hole and Mouth
(3-DOF) |
 |
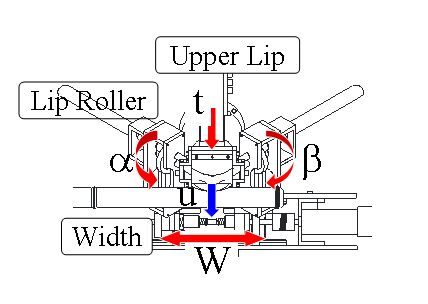 |
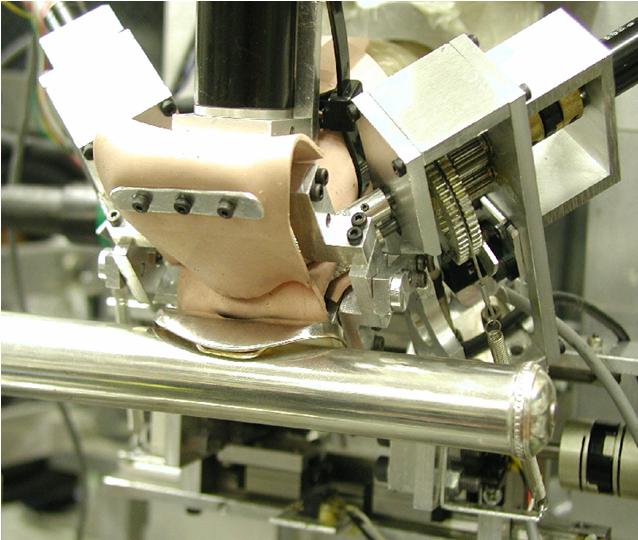
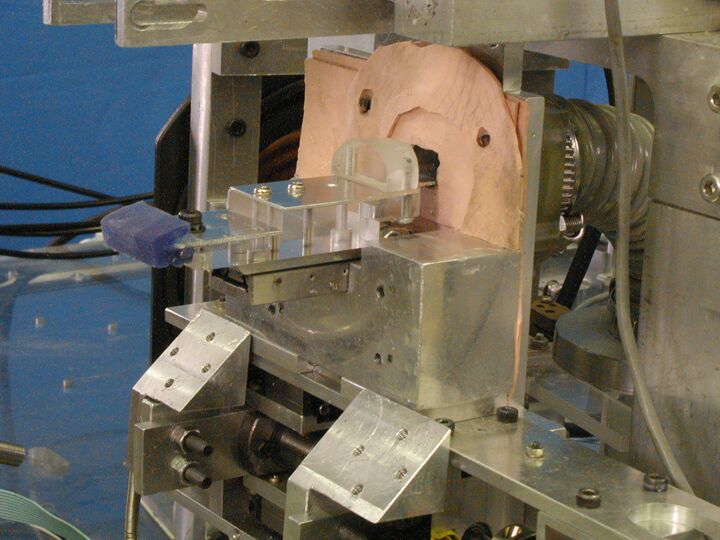
| Fig. 5
Lips made by elastic body
(3-DOF) |
 |
---------- |
 |
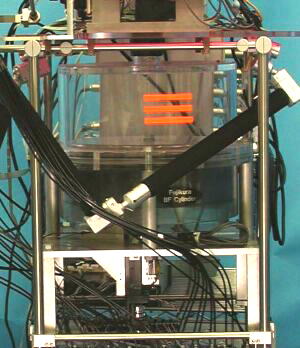
| Fig. 6 Lung (same volume as a human adult) |
Fig. 7
Vibrating mechanism |
 |
 |
| Fig. 8 Fingers (which can trill)
|
 |
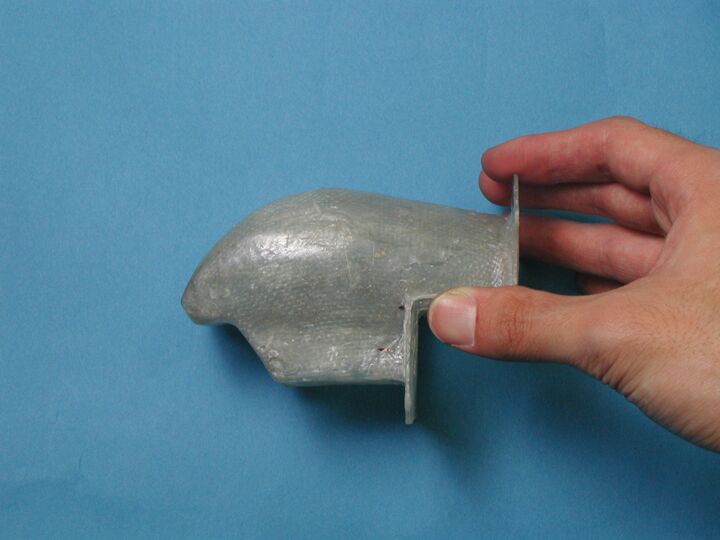 |
| Fig. 9 Double tonguing mechanism and
buccal
cavity made by FRP |
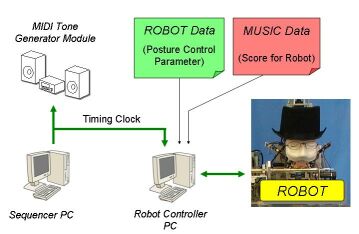
Musical Performance
System
This robot can
perform music by using the musical performance system (Fig.10). Sequencer
PC outputs MIDI data, and tone
generator module performs the accompaniment. The robot control PC receives
timing clock from MIDI data. This
robot has “Robot Data” ( the parameter to each tone) and “Music Data”(the
score for this robot). The robot control PC outputs each “Robot Data”
parameters in order of “Music Data” synchronizing with the timing clock. So,
this robot can play a flute.
We developed the interface device ”Foot
Pedal(Fig. 10)” to control the start timing and tempo, for human flute player
can use this tool while he is playing a flute.
 |
 |
| Fig.
10 MIDI accompaniment system |
Fig. 11
Foot Pedal |
This
robot records the MIDI
information that human played the MIDI instrument. From the information, this
robot plays the flute like a round or repeats like a
parrot.
So we can perform as if we played
in concert with this robot (Fig. 12).
 |
| Fig. 12
Ensamble using MIDI instrument |
Musical Performance
Activities
Takanishi Lab. Top Page
Mr.
Wakamatsu (our technical adviser) Home Page
・・・・・・・・・・・・・・・・・・・・・・・・・・・
Last Update Nov. 12th,
2002