人間形フルート演奏ロボット
WF3-RIX
(Waseda Flutist No.3-Refined-IX)
研究目的
高西研究室では,人の心身のメカニズムを追及し,人間とロボットの共生を目指してヒューマノイドロボットの研究開発を行っています.
その中で人間と情緒や感性レベルでの交流を行うことは,ヒューマノイドにおける重要な機能のひとつであると考えています.
我々はそのような交流の場として音楽空間に着目し,楽器演奏時の人体各器官の働きを機械モデルにより再現した人間形フルート演奏ロボットの開発を行い,人間の楽器演奏のメカニズムと,人間とロボットとの音楽空間におけるインタラクションを工学的視点に立って追究しています.
人間形フルート演奏ロボットの開発は1990年に開始され, まずMIDI伴奏同期システムの構築と, 基本的な演奏を行うためのハードウェア設計を中心に開発が進み, フルート演奏における人体各器官の機能を可能な限り忠実に再現しています.
また, プロのフルート奏者をテクニカルアドバイザーに迎え, 人間の演奏技法を抽出し, 近年は演奏表現力向上とロボットの自律性向上を目指した研究(吹鳴音探索など)を行っています.
最近は, 人間とロボットのインタラクションについての研究が行われ, ロボットと簡単な合奏をすることが出来るようになりました.
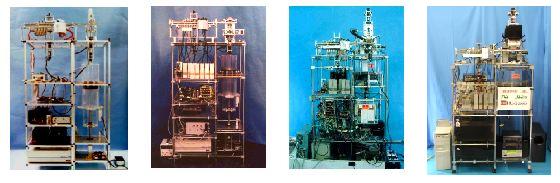 |
| Fig. 1 歴代WFシリーズ |
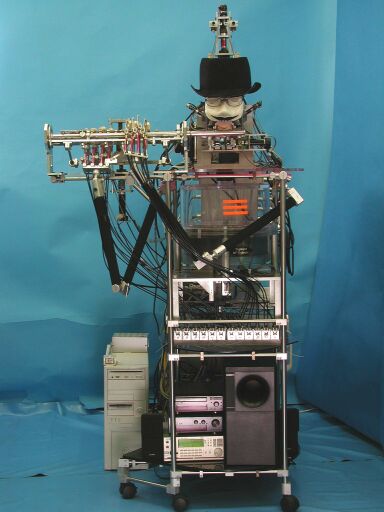
Fig. 2 WF3-RIX
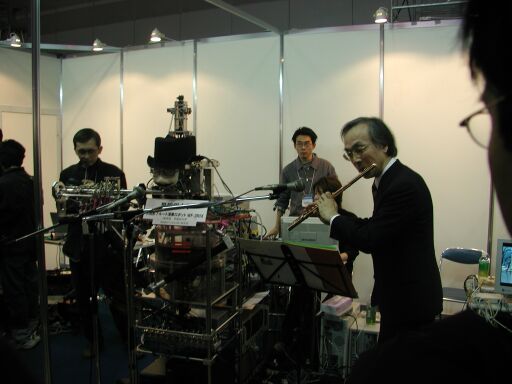
(Waseda Flutist No.3-Refined IX)Fig. 3 テクニカルアドバイザー・若松久仁光氏とWF3-RIX
ロボットは以下のハードウェアを備えています。
 |
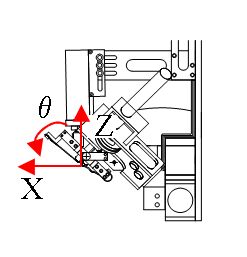 |
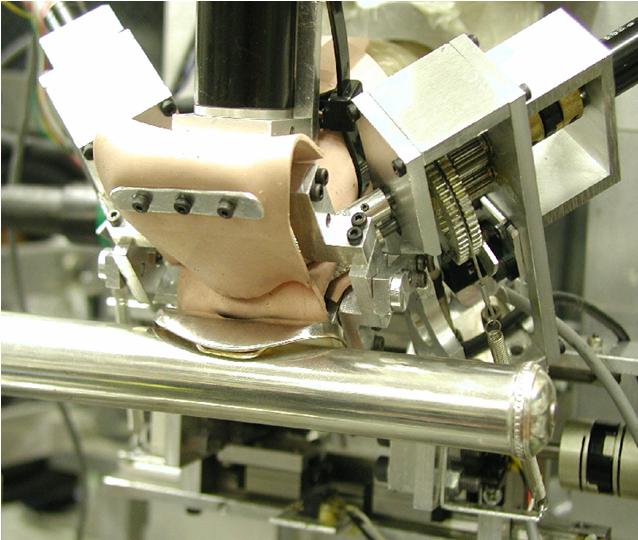
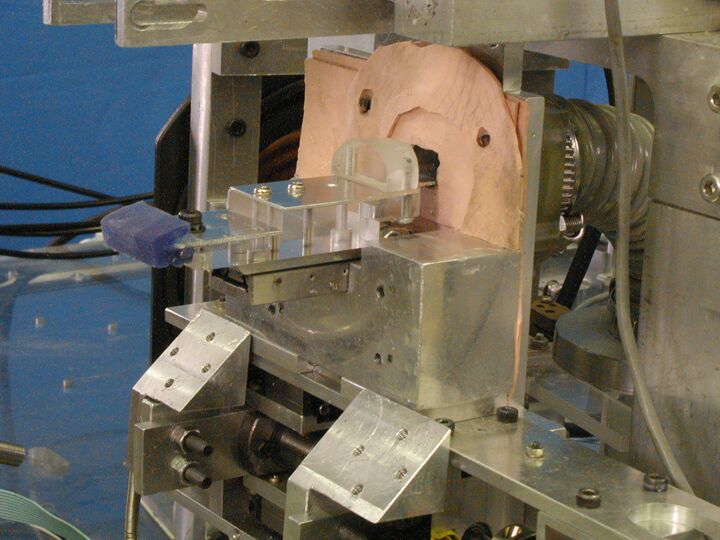
| Fig. 4 フルート歌口とロボット口部の相対位置決め機構(3自由度) | |
 |
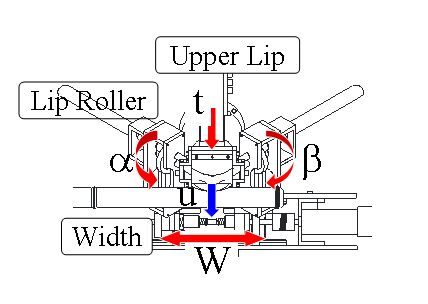 |
| Fig. 5 弾性体を用いた口唇部(3自由度) | |
 |
------------- | 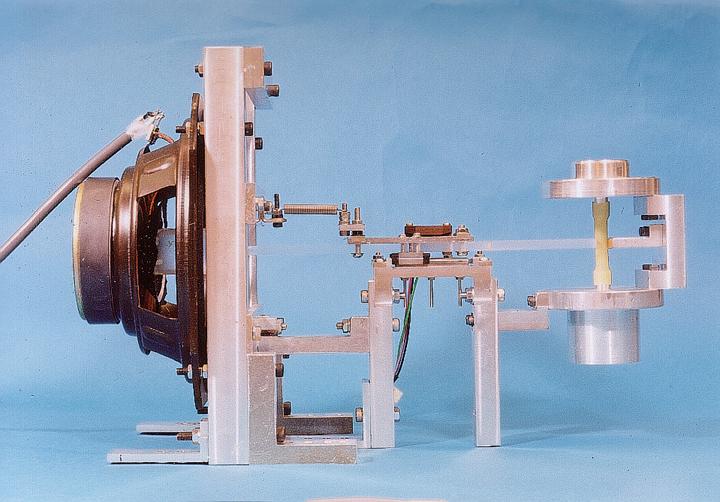 |
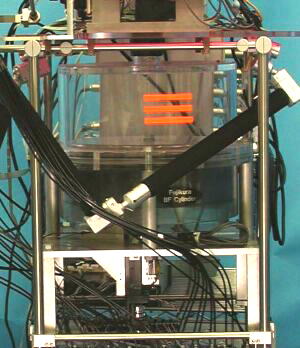
| Fig. 6 成人男性と同容量の肺部 | Fig. 7 ヴィブラート機構 |
 |
 |
| Fig. 8 トリル奏法可能な指部 | |
 |
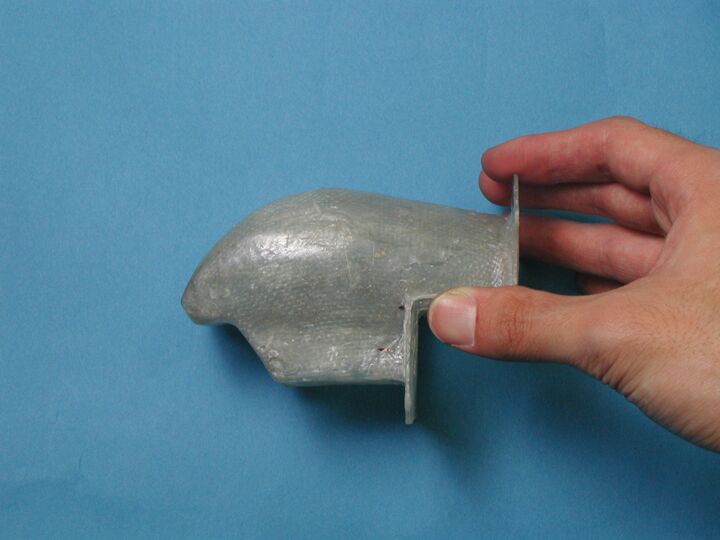 |
| Fig. 9 ダブルタンギング機構とFRP製の口腔部 | |
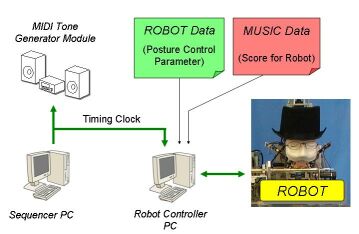
演奏は伴奏用MIDIデータの出力を行うシーケンサとロボット制御用コンピュータとのMIDI信号の通信により行います。ロボットの演奏制御プログラムは各音の吹鳴に必要な制御パラメータのデータと、MIDI伴奏データに対応するシーケンスデータを利用して、同期演奏を実現しています。(Fig.10)
従来の演奏システムにおいてロボットと共に演奏する人間が、伴奏のスタートタイミングとテンポを操作できるようになりました。そのためのインターフェースとしては、フルート奏者が演奏中に使用できるようにフットペダル(Fig. 11)を採用しました。
 |
 |
| Fig. 10 MIDI伴奏同期演奏システム | Fig. 11 フットペダル |
また、人間が演奏したMIDI楽器の演奏情報からロボットがその演奏を鸚鵡返ししたり、あたかもロボットと共演しているかのように、演奏できます。(Fig. 12)
これらのシステムにより、人間とロボットとのインタラクション性も向上しました。
 |
| Fig. 12 MIDI楽器を使った共演の様子 |