Foot system, that can maintain four-point-contact
on uneven terrian
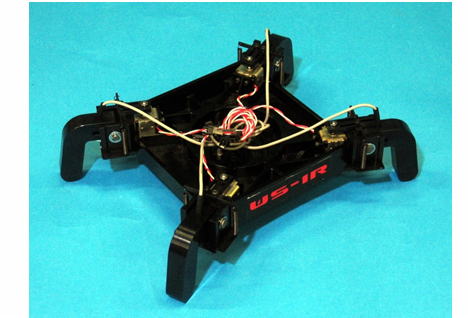
WS-1(Waseda-Shoes No.1)
WS-1R(Waseda-Shoes No.1 Refined)
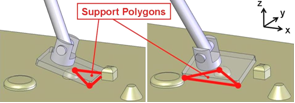
To date, many control method have been studied, asumming that the soles
of a biped walking robot contact the ground as four points. It is difficult
for a biped robot with rigid and flat soles to maintain four-point contact
on uneven terrain. It means that the biped robot can lose its balance.
To solbe thes kind of problem,We proposed new foot-system, that can maintain
four-point contact on uneven terrain.
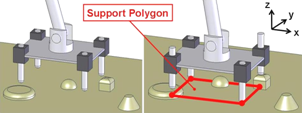
Foot-system have four support legs, that can move passively on its four
corners. These support legs move passively and maintain four-point contact
on uneven terrain.
Support leg has a switch that sense it's contacting on terrain. When all
support legs contact on terrain, the foot-system locks support legs and
maintains support porigons. And when all support legs leave the terrain,
all support legs are unlocked. About it's locking mechanism, I'll say later.
Foot-system's operation principle is as the diagram below indicates.
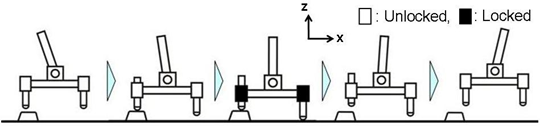
Fig. 3 Operation Principle
Thickness of the Plate: 20 mm
Walking Cycle: 0.24 s/step
Step Length: 0.2 m
Walking Cycle: 0.24 s/step
Step Length: 0.2 m
| Size | 200×294×65 mm |
|---|---|
| Weight | 1.8 kg |
| Movable Range on Z-axis | 20 mm |
| Drive System of Actuator | Push-Pull Solenoid |
| Size | 200×294×65 mm |
|---|---|
| Weight | 1.85 kg |
| Movable Range on Z-axis | 20 mm |
| Drive System of Actuator | Push-Pull Solenoid |
Fig.1
Fig.2
Support Polygons on the Uneven Surface with rigid and flat sole
Support Polygons on the Uneven Surface with using this system
1. Sensing & Locking Mechanism
WS-1 senses contacting on terrain by micro-switches at the end of each
support legs. And this foot-system consists of cam-type locking mechanisms
as the diagram below indicates.
Locking mechanism's operation principle is that the cam rotates, the braking-brock is inserted into the space, and the supporting point is locked. A solenoid is used to actuate a braking brock down,because it is easier to control than a motor and it has a faster response. Frictional locking mechanisms like this don't require brake power. So, this foot-system is light weight.
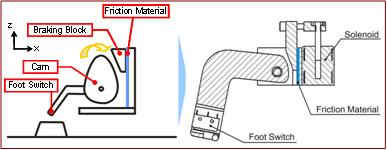
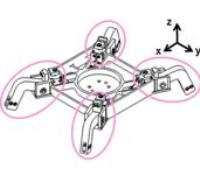
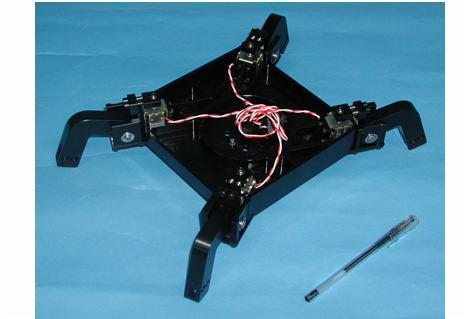
Fig. 4 Support Leg of WS-1 Over view
2. Specification of WS-1
1. Sensing & Locking Mechanism
WS-1 has three problems. First problem is that micro-switches were not
often reactive according to the shape of the road. Second is that friction
materials are not strong enough to endure landing impact. And third problem
is that the response rate of locking mechanism is late.
To solve these problems, as the diagram below indicates, we changed the
arrangement of foot switches, chose more higher accuacy sensor, chose chloroprene
rubber instead of old friction materials, and installed tension springs.
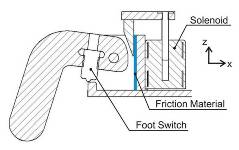
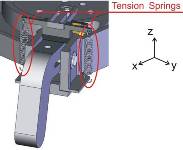
Fig.5 Support Leg of WS-1R Over view
2. Specification of WS-1
3. Movies
Thickness of the Plate: 3 〜20 mm
Walking Cycle: 0.24 s/step
Step Length: 0.2 m