セミアクティブ適応接地
支持多角形確保機構
WS-1(Waseda-Shoes No.1)
WS-1R(Waseda-Shoes No.1 Refined)
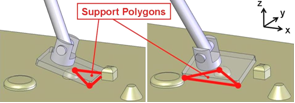
2足歩行ロボットが安定して歩行を行うためには単脚支持期に足底において支持多角形が確保できることが多くの場合前提条件となっています.しかし多くの2足歩行ロボットが採用している剛体平板の足底では,凹凸の多い面を歩行しようとする場合に左下の図の様に満足な支持多角形を構成できず安定した歩行が困難となってしまいます.このような問題を解決するために,凹凸が複数ある路面に接地する場合においても右下の様に満足な支持多角形を構成できるような足部自体が能動的に支持多角形を構成する足部機構の開発を目的としました.
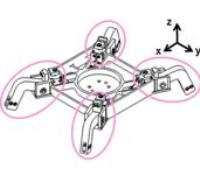
セミアクティブ適応接地支持多角形確保機構は足底4隅に受動的に動く各支持点を持っており,この各支持点が受動的に動くことにより凹凸路面にならいます.
各支持点にはそれぞれ接地を感知するスイッチが設けられており,4つの支持点全ての接地を感知すると各支持点がロックされ,速やかに支持多角形を構成・保持するというものです.そして足が地面から離れると同時にロックを解除します.ロック機構については後の項で説明します.
機構動作の流れは下図のようになっています.
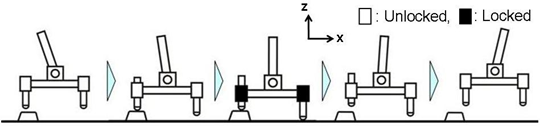
Fig. 3 機構動作の流れ
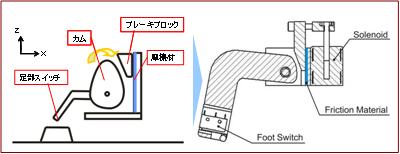
WS-1の接地検知は足先に取り付けられたマイクロスイッチによって行われ,ロック機構はカムを用いた機構を採用しています.足部機構4隅に配置される支持部の基本的な構成は下図のようになっています.
支持点が上下に動くとカムが回転するようになっており,ロック動作を行う時はブレーキブロックをカムと摩擦材との間に挟んでカムの時計周りへの回転を抑えることで,支持点が更に上方向へと移動する事を妨げ,ロックを行います.
ブレーキ力を摩擦力で発生させるため,高出力のブレーキ等を用いることなく軽量なロック機構を実現することができます.WS-1ではブレーキブロックの駆動装置として双安定型ソレノイドを用い,小型・軽量な機構となっています.
Fig.4 支持部概要
路面の高さ: 3 〜 20 mm
歩行周期: 0.24 s/step
歩幅: 0.2 m
歩行周期: 0.24 s/step
歩幅: 0.2 m
| 大きさ | 200×294×65 mm |
|---|---|
| 重さ | 1.8 kg |
| 対応高さ | 20 mm |
| 駆動装置 | 直動型ソレノイド |
| 大きさ | 200×294×65 mm |
|---|---|
| 重さ | 1.85 kg |
| 対応高さ | 20 mm |
| 駆動装置 | 直動型ソレノイド |
剛体平板の足底で凹凸を踏んだ場合の支持多角形
Fig.2
セミアクティブ適応接地支持多角形確保機構を用いて凸凹を踏んだ場合の支持多角形
Fig.1
1. 接地検知部及びロック機構
2. WS-1仕様
1. 接地検知部及びロック機構
WS-1の問題点として主に次の3点がありました.まず路面状況によっては接地検知ができない事があるという点,摩擦材として採用した摩擦シートの耐久性が悪い点,そしてブレーキ動作の応答速度が遅いという点です.
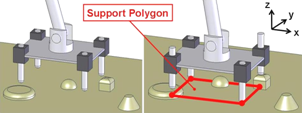
これらの問題を解決するため,まずマイクロスイッチをより高精度の接触センサーに変更し,下図のように路面の状況に関係なく検知が行える様に配置場所を変更しました.次いで摩擦材の問題については0.5mm厚のクロロプレンゴムシートに変更することで耐久性の向上を図りました.そしてブレーキ動作速度の問題に関しては,ソレノイドだけでなく引っ張りバネを併用することでブレーキ動作の応答速度向上を図りました.
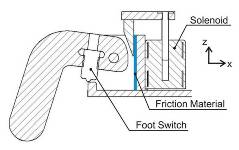
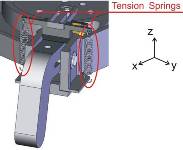
Fig.5 WS-1R支持部概要
2. WS-1R仕様
3. 実験映像
板の厚さ: 20 mm
歩行周期: 0.24 s/step
歩幅: 0.2 m