1.研究目的
2足歩行という移動様式は,4足以上の多足歩行と比較して不安定で歩行安定化制御が難しくなるが,凹凸のある路面や,階段や梯子の昇降など不連続な歩行面に対応できるという点で優れている.しかし脚式移動機構は,平地での移動速度や移動効率については車輪式移動機構に劣る.そこで、2足歩行ロボットのためのインラインスケート型受動車輪式足部機構WS-3を製作し,スウィズル動作というスケートを周期的に運動させることにより車輪の摩擦力を推力として取り出す滑走移動のための制御法を考案した.
▲TOPへ戻る2.スウィズル動作による滑走移動法 WS-3
(1)スウィズル動作の原理
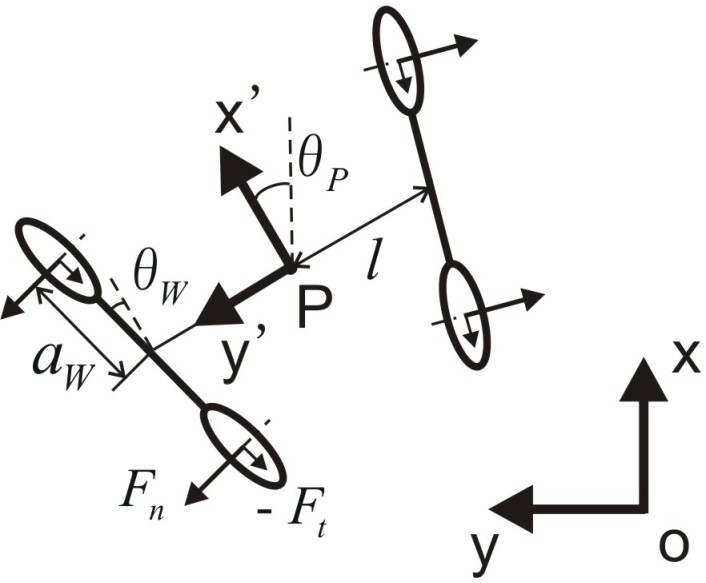
スウィズル動作は車輪の転がり方向は摩擦係数が小さく軸方向は摩擦が大きいという抗力の異方性を利用することにより推進力を得ている.制御入力としては左右の足の距離l と各足がx ' 軸となす角を考える(図1).
 |
|
Fig.1 車輪の位置・方向 |
動摩擦の状態に限り車輪に加わる力は次式で表される.
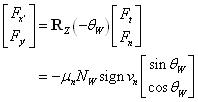 |
ただし,Nw:路面から車輪に加わる垂直抗力, vn:垂直方向の速度,μn:車輪の垂直方向の摩擦係数.
本研究では移動を前後方向に限定し,各足がx ' 軸に対して対称に運動するものとする.また実際とは異なるが簡単のために各車輪に路面から加わる垂直抗力は均一なものであると仮定すると,y ' 方向の力は相殺して内力となりFx ' の合力だけを推進力として取り出せる.
(2)制御法
本研究では,力に応じて位置指令値を変化させる制御法を考案した.本制御方法の目的は第一に内力を一定範囲内に制限すること,第二に力のレスポンスがどのようなものであっても大きな位置指令値が入らないようにすることである.これを達成するために新たに考案した制御方法の骨子は次の2点からなる.まず,位置指令値は基本パターン関数を時間領域で変形させたものに限定する.このことにより,足先位置はある定められた軌道に拘束される.次に,位置指令値の変化率は計測した内力を元にしてゲイン関数によって決定する.これはつまり,内力が過大にならないように自動的に位置指令値が変更されることを意味する.
▲TOPへ戻る3.評価実験
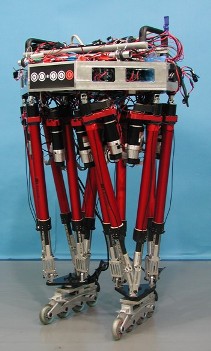
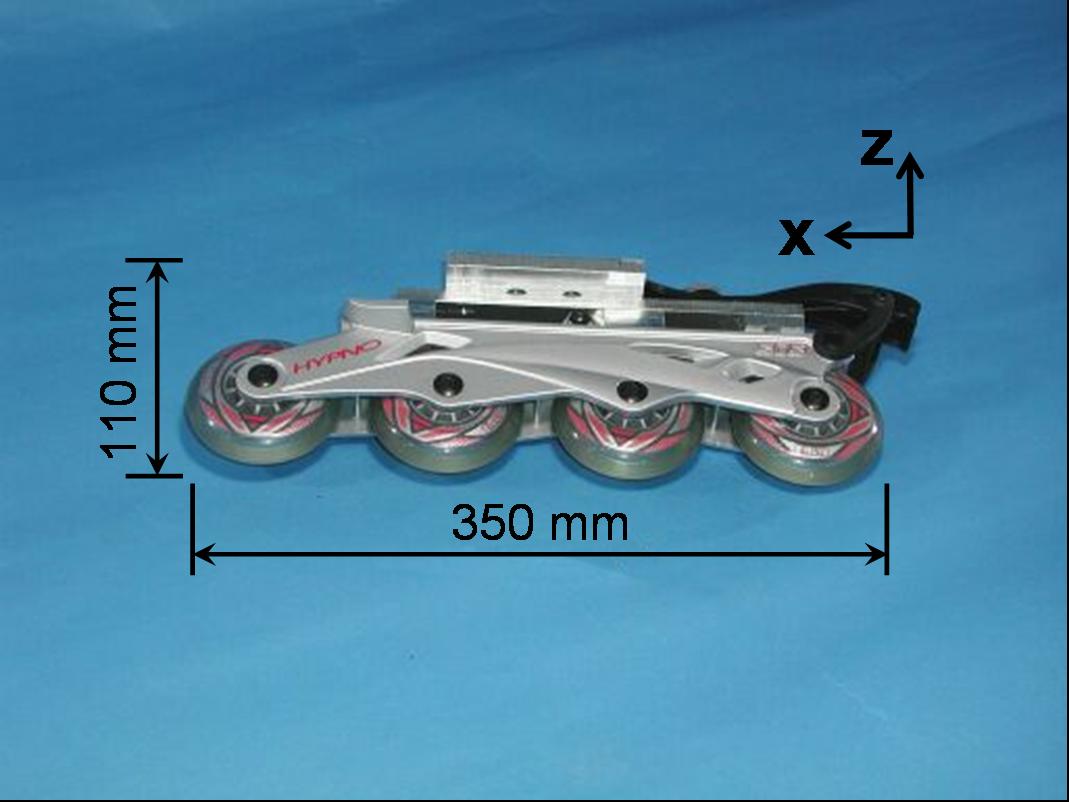
本研究で製作したインラインスケート型受動車輪式足部機構WS-3(Waseda Shoes - No.3)を図3に示す.これは市販品のインラインスケートを人間搭乗型2足歩行ロボットWL-16R(Waseda Leg - No.16 Refined)に取り付けるためのアタッチメントを装着したものであり,4つの受動車輪はベアリングを備えているため転がり特性が良く,また転がり方向に垂直な方向に対しては良好な摩擦特性を有している.
 |
|
Fig.3 WS-3 |
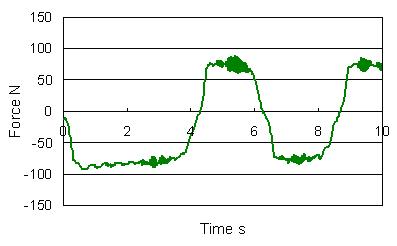
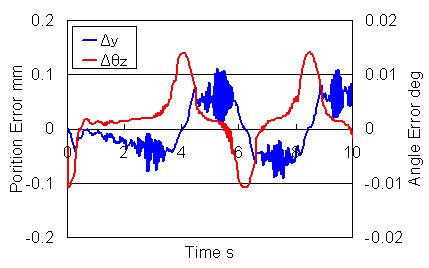
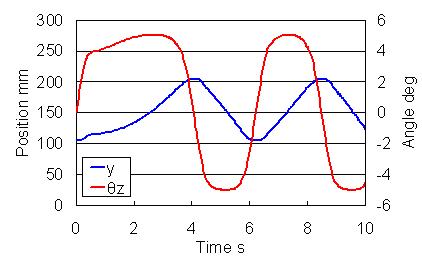
評価実験としては,スウィズル動作のための制御アルゴリズムを評価するため,足先部の位置および内力を計測して検証した.この際,力のリミット値を±100[N],基本パターンの周期を1.5[sec]とし,位置と角度の位相差を45[deg]に設定している.実験の結果,円滑なスウィズル動作の生成に成功した.y方向の力の応答を図4,足先の位置・角度偏差を図5,実際に出力された位置・角度指令値を図6に示す.足先位置と角度の適切な位相差により,ロボットは停滞することなくスムーズに移動していることがわかる.また,考案した力に応じて指令値を変化させる制御手法により,内力はほぼ一定値に制限され,サーボ追従誤差も非常に小さくなっている.
 |
|
Fig.4 y方向の力の応答 |
 |
|
Fig.5 足先の位置・角度偏差 |
 |
|
Fig.6 位置・角度指令値の出力 |
|
▲TOPへ戻る