Inline Skate System
WS-3
Waseda Shoes-No.3
1. Research Purpose
The advantages of legged locomotion in contrast to wheel-driven locomotion are particularly obvious in rough terrain. Especially, biped walking is easily adaptable to discrete surface such as spiral stairs, ladders and stony paths. On flat terrain, however, wheeled locomotion is absolutely better than legged locomotion in terms of speed and energy efficiency.
So, an inline skate system, WS-3 (Waseda Shoes - No.3), is developed for biped walking robots, and a new control method is described to realize a swizzle motion, which is a sliding motion to utilize wheels' frictional forces by moving skates periodically.
2. Sliding Method by Swizzle Motion WS-3
(1) Principle of Swizzle Motion
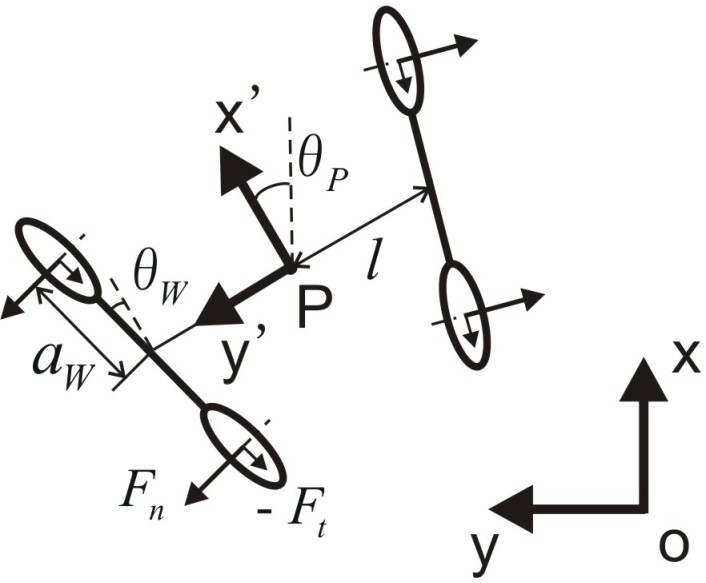
Swizzle motion develops thrust by utilizing the drag's anisotropy that the coefficient of wheel's rolling friction is small and the coefficient of wheel's vertical friction is large. The control inputs are the distance between right and left foot and the angles between x ' axis and each foot. (see Fig. 1)
 |
|
Fig.1 Position and direction of wheels. |
Only if the dynamic friction is caused, the force which acts on a wheel is calculated by using the above equation as follows.
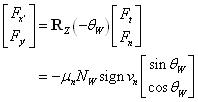 |
Where Nw is the normal force which acts on a wheel from the ground. vn is the vertical velocity. μn is the coefficient of wheel's vertical friction.
In this research, the movement is limited to back and forth, and both right and left legs move symmetrically to the x ' axis. Assuming that the normal forces which act each wheel from the ground are the same, the lateral reaction forces Fy ' are canceled and only the sagittal reaction forces Fx ' remain as a driving force.
(2) Control Method Based on Foot Reaction Force
In this research, a new control method was devised to change a foot reference position based on a foot reaction force. This control method has two purposes. One is to limit internal forces to a certain value. The other is to prevent big increments of foot reference position even if a foot reaction force is too big. To accomplish these purposes, the new control method consists of the following two key points. Firstly, reference foot position is set by transforming a basic pattern function in the time-domain. So, a foot position is constrained to a certain trajectory. Secondly, a change rate of reference position is determined by using a gain function based on the force data obtained by the foot force sensors. It means that reference position is automatically changed to limit big internal forces.
▲Go to TOP3. Evaluation Experiments
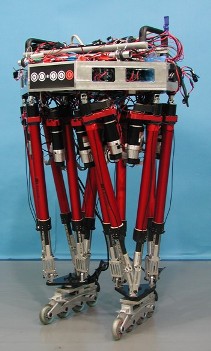
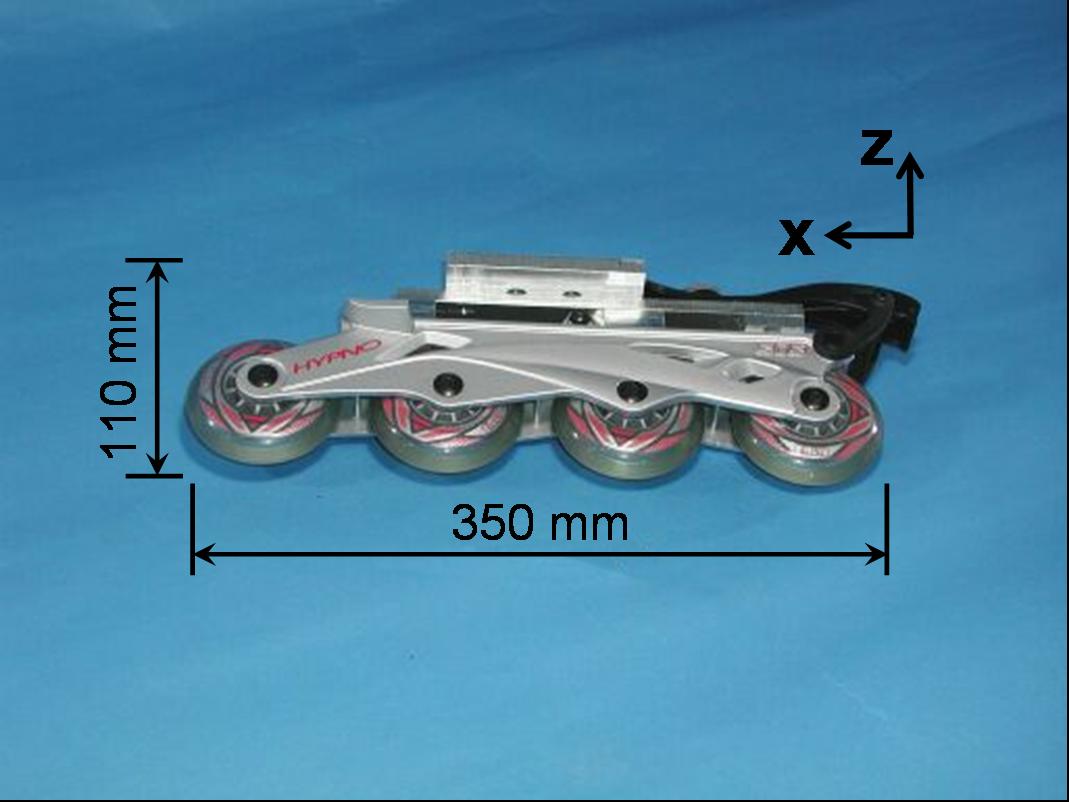
An inline skate system, WS-3, developed in this research is shown in Fig. 5. This is a commercial inline skate to be attached to the human-carrying biped walking robot, WL-16R (Waseda Leg - No.16 Refined). Four passive wheels of this skate have small rolling resistance because they have bearings. Moreover, they have large friction coefficient in the perpendicular direction to the rolling direction.
 |
|
Fig.3 WS-3 |
To evaluate the new control method for a swizzle motion, the foot position and the internal forces were measured. Then, the minimum and maximum value of internal forces, Fmin and Fmax, the period T and the phase shifting φ between a foot position and angle are set as follows:
 |
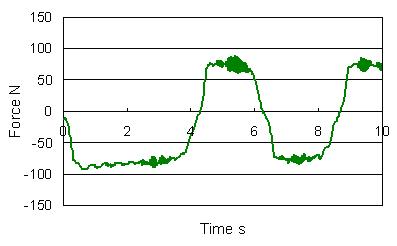
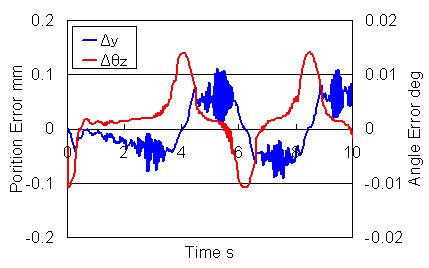
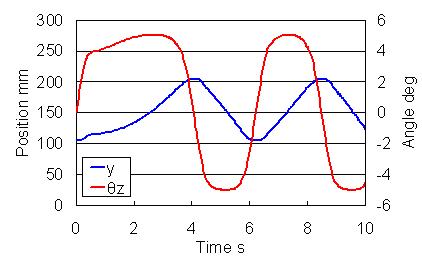
As an experimental result, a smooth swizzle motion was realized without stopping according to the appropriate phase shifting between foot positions and angles. (see Fig. 6) Fig. 7 shows the force response data along y axis. Fig. 8 shows the deflection of left foot position and angle. Fig. 9 shows the left foot reference position and angle which are changed based on a foot reaction force. According to the developed control method to change a reference position based on reaction forces, internal forces are limited within about 100 N, and the servo following error is very small.
 |
|
Fig.4 Reaction force along y axis |
 |
|
Fig.5 Deflection of position and angle |
 |
|
Fig.6 Reference position and angle |
|
▲Go to TOP