1.研究目的
2足歩行という移動様式は,4足以上の多足歩行と比較して不安定で歩行安定化制御が難しくなるが,凹凸のある路面や,階段や梯子の昇降など不連続な歩行面に対応できるという点で優れている.しかし脚式移動機構は,平地での移動速度や移動効率については車輪式移動機構に劣る.そこで,ローラースケート型受動車輪式足部機構WS-4を2足歩行ロボットの片足に取り付け,他方を通常の板状の足とし,蹴り出し動作によって推力を得て滑走移動するパターン生成法を構築した.
▲TOPへ戻る2.スケーティングパターン生成法WS-4
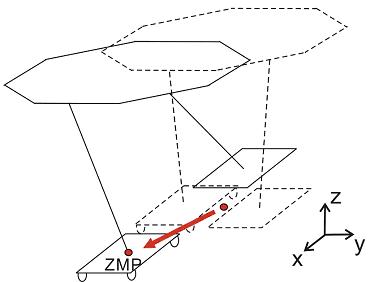
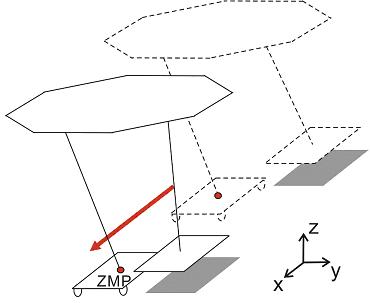
新しく考案したスケーティングパターンは,ZMPを立脚側に移しながら蹴るところに特徴がある(図1).この蹴り出し動作は次の3つのパターンを接続したものとして考えられる.
- 蹴り出しパターン
- 滑走パターン
- 両立脚パターン
また,座標系は運動座標系をスケート側の足に固定し,蹴り足側の運動をこの座標系で指定した.このように座標系を定義すると,各パターンで決定すべきパラメータは次のようになる(一部従属的なものも含まれる).
 |
|
Fig.1 スケーティング時のZMPの移動 |
(1)蹴り出しパターン
蹴り足が離地する際のスケート側の足の x 方向の速度がスケーティング動作の移動速度を決定する.蹴り足は路面に接地しておりその位置は固定であるから,スケート足の絶対速度のみを指定すればよく,その他のパラメータはこれに応じて自動的に決定する.
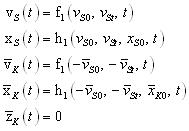 |
ただし,vs0:スケート足の初期速度,vst:スケート足の最終速度である.
蹴り出しパターンのイメージ図を図2に示す.
 |
|
Fig.2 蹴り出しパターン |
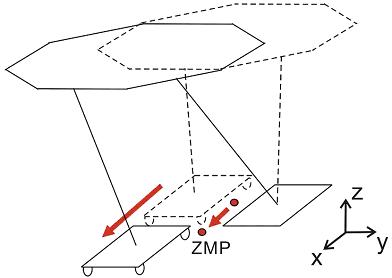
(2)滑走パターン
滑走パターンとは,蹴り出しの力によって惰性で滑る期間のパターンを指す.
実際にはロボットは車輪の転がり抵抗によって減速するが,減速時の加速度は非常に小さいと考え,モーメント補償計算[13]でこれを無視できると仮定すれば速度はある程度自由に決めることができる.
また,滑走中の蹴り足は自由に動かすことが可能なので,これについてもパターン設定時に決める必要がある.ZMPに関してはスケート側の支持多角形の範囲内に設定する.
以上よりスケート側の足は速度を,遊脚側は位置を基準に設定すればよいから,滑走パターンの各パラメータは次のようになる.
 |
滑走パターンのイメージ図を図3に示す.
 |
|
Fig.3 滑走パターン |
(3)両立脚パターン
両立脚時はロボットが完全に静止している状態である.このときのZMPは両足の中間点に設定する.
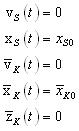 |
両立脚パターンのイメージ図を図4に示す.
 |
|
Fig.4 両立脚パターン |
3.評価実験
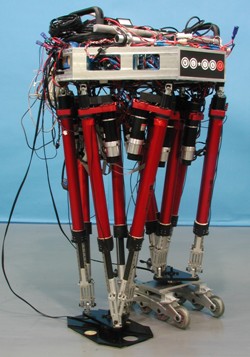
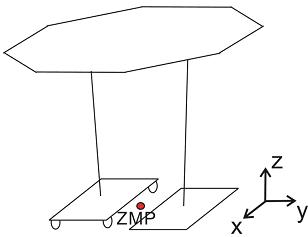
本研究で製作したローラースケート型受動車輪式足部機構WS-4(Waseda Shoes - No.4)を図5に示す.これは市販品のインラインスケートを二つ結合し,人間搭乗型2足歩行ロボットWL-16R(Waseda Leg - No.16 Refined)に装着可能にしたものである.
 |
|
Fig.5 WS-4 |
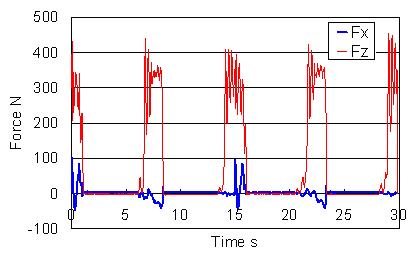
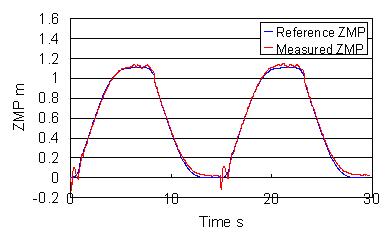
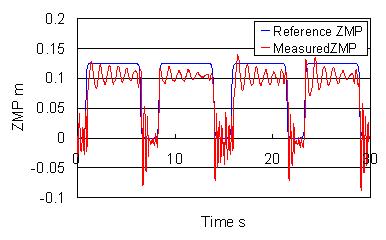
実験の結果,円滑な前進・後退動作の生成に成功した.計測した蹴り脚の反力のグラフを図6に示す.蹴り出し時に十分な摩擦力得るための z 方向の力はほぼ一定に保たれており,また推進力になる x 方向の力も十分に得られている.着地衝撃による影響も少なくなっており,考案したパターン生成法は有効であると考えられる.またZMP軌道からも安定した滑走動作を実現できていることがわかる(図7).
 |
|
Fig.6 蹴り脚の反力 |
 |
|
(a) x 軸方向 |
 |
|
(b) y 軸方向 |
|
Fig.7 ZMP軌道 |
|
▲TOPへ戻る