Roller Skate System
WS-4
Waseda Shoes-No.4
1. Research Purpose
The advantages of legged locomotion in contrast to wheel-driven locomotion are particularly obvious in rough terrain. Especially, biped walking is easily adaptable to discrete surface such as spiral stairs, ladders and stony paths. On flat terrain, however, wheeled locomotion is absolutely better than legged locomotion in terms of speed and energy efficiency.
So, a roller skate system, WS-4 (Waseda Shoes - No.4), is developed for biped walking robots, and we proposed a motion pattern generation for roller skating of biped walking robots.
2. Skating Motion WS-4
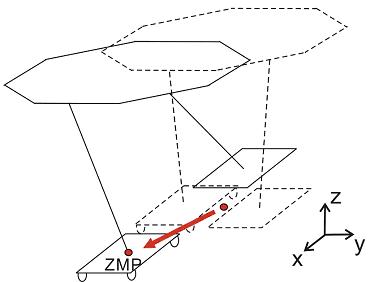
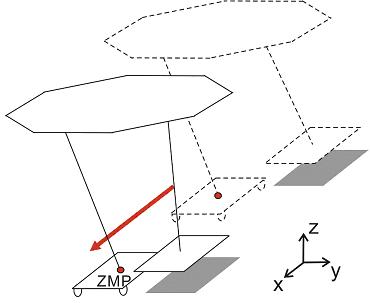
We propose a kicking pattern generation based on ZMP from a kicking phase to a standing phase (Fig.1). This kicking pattern consists of the next three patterns.
- Kicking motion
- Sliding motion
- Double support phase
In addition, we fixed a moving coordinate system on a skating foot, and appointed a position of the kicking foot in this coordinate system. So, the parameters that should be decided are as follows.
 |
|
Fig.1 Skating motion shifting from the kicking foot to the standing foot |
(1) Kicking motion
The velocity of the skating foot about the x direction when the kicking foot gets off the ground decides the moving velocity of the skating motion.
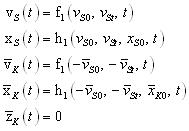 |
Where vs0 is the initial velocity of the skating foot. vst is is the initial velocity of the skating foot.
The image of the kicking motion is shown in Fig.2.
 |
|
Fig.2 Kicking motion |
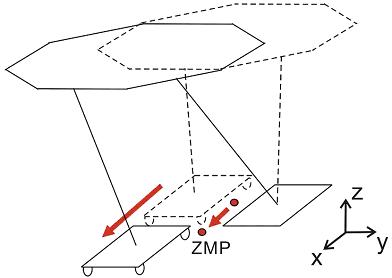
(2) Sliding motion
The sliding pattern is the pattern of the periods coasting by the power of kicking motion.
Actually the robot slows down by the rolling resistance of the wheel. However, we can ignore the acceleration at the time of the slowdown at a moment compensation calculation, because this acceleration is very small.
And it is necessary to decide the position of the kicking foot, because the kicking foot can move freely.
So, the parameters of the sliding motion are as follows.
 |
The image of the sliding motion is shown in Fig.3.
 |
|
Fig.3 Sliding motion |
(3) Double support phase
Double support phase is that the robot is completely stopping. ZMP is set at the midway point of both legs.
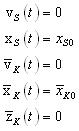 |
The image of double support phase is shown in Fig.4.
 |
|
Fig.4 Double support phase |
3. Evaluation Experiments
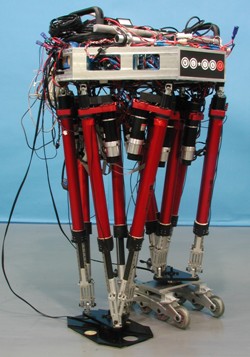
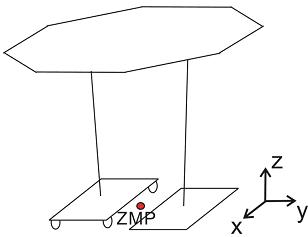
A roller Skate system, WS-4, developed in this research is shown in Fig. 5. This is a unit of two commercial inline skates to be attached to the human-carrying biped walking robot WL-16R (Waseda Leg - No.16 Refined).
 |
|
Fig.5 WS-4 |
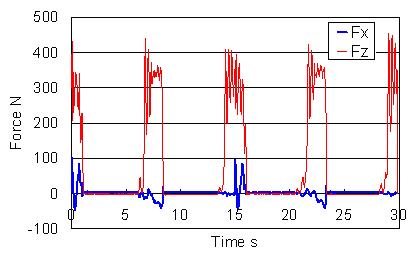
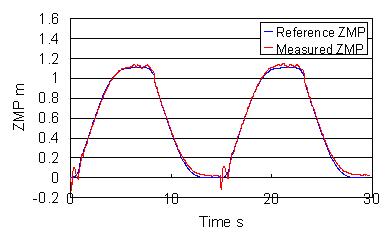
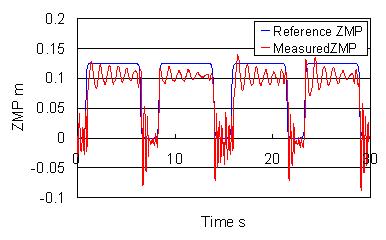
As an experimental result, a smooth skating motion was realized. The force applied on the kicking foot is shown in Fig. 5. And ZMP trajectories are shown in Fig. 6. The steady sliding motion was realized by these.
 |
|
Fig.6 Force applied on the kicking foot |
 |
|
(a) x axis |
 |
|
(b) y axis |
|
Fig.7 ZMP trajectories |
|
▲Go to TOP