Foot system, that can maintain four-point-contact
on uneven terrian
WS-5(Waseda-Shoes No.5)
・Background & Motivation
To date, many control method have been studied, asumming that the soles of a biped walking robot contact the ground as four points. It is difficult for a biped robot with rigid and flat soles to maintain four-point contact on uneven terrain. It means that the biped robot can lose its balance.
To solve this kind of problem,We proposed new foot-system, that can maintain four-point contact on uneven terrain.
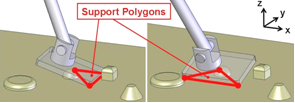
Fig.1
Support Polygons on the Uneven Surface with rigid and flat sole
Fig.2
Support Polygons on the Uneven Surface with using this system
Foot-system, WS-1R(Waseda-Shoes No.1Refined) have four support spikes, that can move passively on its four corners. These support spikes move passively and maintain four-point contact on uneven terrain.
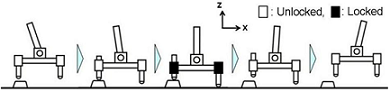
Each support spike has a switch which sense contact of terrain. When all support spikes contact terrain, the foot-system locks support spikes and maintains support polygon. Then when all support spikes leave the terrain, all support spikes are unlocked. Foot-system's operation principle is as the diagram indicated below.
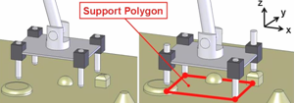
Fig.3 WS-1R
Fig.4
Detail of support spike
Fig.5
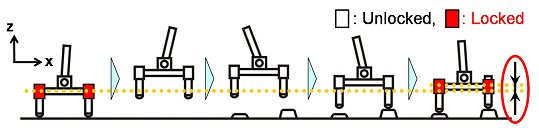
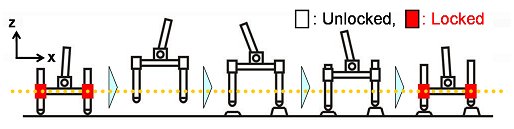
Operation principle of WS-1R
But this operation principle has some problems. First of all, a robot using WS-1R cannot walk stably on the terrain which convexed upward at all contact points. Because WS-1R is locked when all spikes contact the terrain, so a foot which steps on a terrain convexed upward is locked at a upper level compared to the other foot.
Secondly, WS-1R cannnot lock support spikes when it stepping on a concaved terrain because all spikes are unable to contact the terrain.
Fig.6
Stepping on a terrain convexed at all contact points
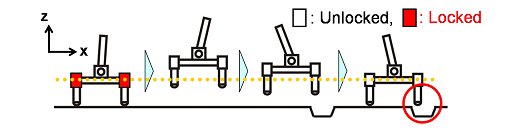
Fig.7
Stepping on a concaved terrain
・Locking Mechanism of WS-1R
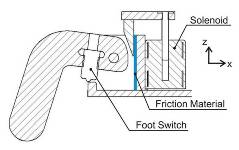
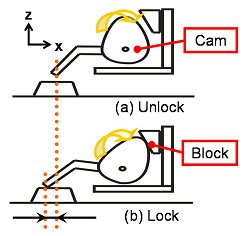
WS-1 detect landing by the micro-switch arranged in each spike. And this foot-system consists of cam-type locking mechanisms as the diagram indicated below. As locking mechanism's operation principle, the cam rotates as a spike adapt to terrain, the braking-brock is inserted into the space, and the supporting point is locked. For actuating a braking brock, a solenoid is used, because it is more simple to control than a motor and faster in response. And also, frictional locking mechanisms like this don't require brake power.
Fig.8 Locking mechanism of WS-1R
But as a problem, this cam-type locking mechanism makes horizontal movement as it adapts to terrain, due to cam's rotational joint. For instance, when it adapts to a upward-convexed terrain, a tip of spike slips and, in a case, drops from the terrain according to it's horizontal movement.
Fig.9 Spike's slip when adapting to a terrain
・New Operation Principle and Locking Mechanism
・Operation Principle
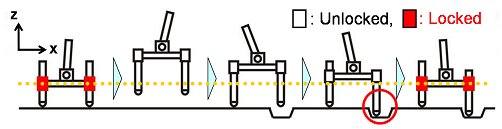
First of all, new operation principle, which locks spikes when a foot came to a setup walking foot level, is installed. As installing this, a foot is able to keep it's level constant even though robot steps on a terrain cnvexed at all contact points.
Fig.10
Adaptation to a terrain convexed at all contact points
Furthermore, some kind of a sensor which is able to measure spike's movement is installed to make middle of spike's movable range as it's standard level. At swing-phase, spike is unlocked and it drops toward ground by it's own weight to enlarge spike's adaptable range. By this, a foot system is able to adapt to a concaved terrain. And as mentioned above, spikes will be locked when a foot comes to it's standard level.
Fig.11
Adaptation to a concaved terrain
The new operation principle mentioned just above is easily installed to WS-1R, but making middle of spike's movable range as it's atandard level is equal to making spike's upward/downward-adaptable range one-half. Even though enlarging it's stroke, it make spike's horizontal movement (slip) more prominent.
・New Locking Mechanism
Because of the problem mentioned above, new locking mechanism which have no horizontal movement and large stroke is desirable.
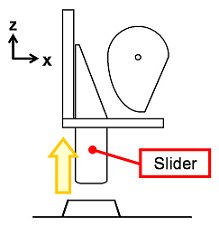
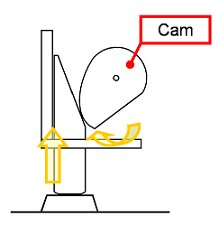
Therefore, new locking mechanism which have linear contact slider is developed. As it's operation, each slider adapts to a terrain and a cam rotated by actuator locks slider's movement at arbitrary position. Merit of this mechanism is that it have no horizontal movement as it adapts to a terrain, and also, it is able to enlarge it's stroke.
Fig.12
New locking mechanism
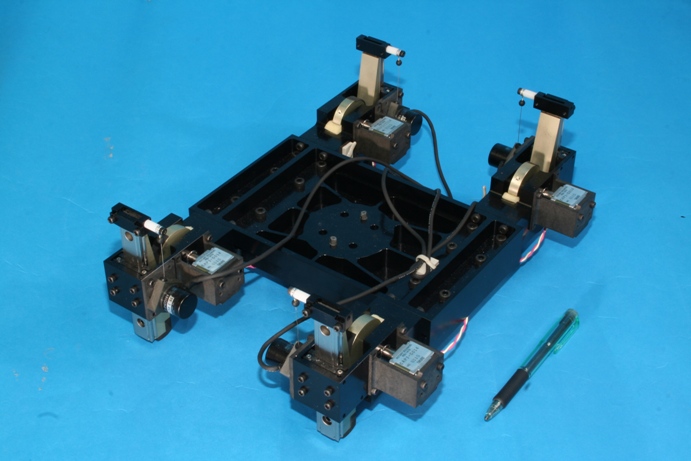
・WS-5(Waseda-Shoes No.5)
・Specification of WS-5
Size
248x322x113 mm
Weight
2.9 kg
Movable range of Z-axis
±25 mm
Drive system of actuator
Rotary solenoid
※Size of support polygon formed by contact points is as same as that of WS-1R.
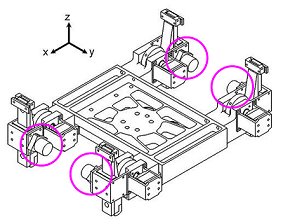
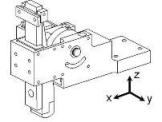
・Detail of Mechanism
At corners of foot system, silders which only move vertically is arranged, and those sliders move upward as its adapt to a terrain.
Also, sliders is locked by friction between slider and cam, therefore it does not need powerful actuator to brake the movement of sliders, it only have rotary solenoid to rotate a cam.
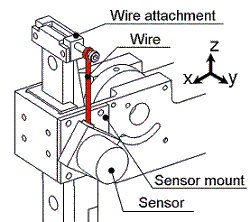
Furthermore, sensor (linear scale encoder) is arranged just beside of each slider, which it's wire is attached to a slider to measure slider's position.
Fig.13 Sensor arrangement of WS-5
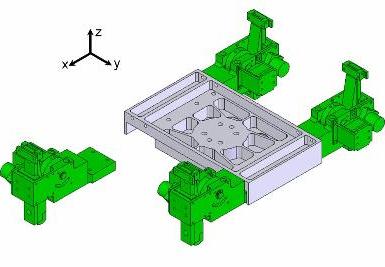
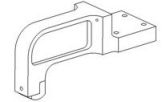
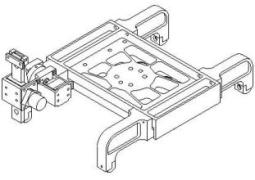
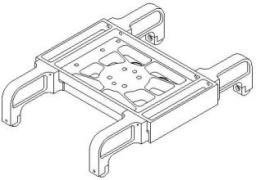
WS-5 consisted of a foot base and 4 terrain-adaptable spike, which enable to a rigid foot system by changing terrain-adaptable module to rigid-contact-point spike. It enables to rearrange a foot system as robot's stability control, a terrain, and etc.
(a) Terrain-adaptable spike
(b) Rigid-contact-point spike
Fig.14 Variety of a foot system by rerrangement of spikes