セミアクティブ適応接地
支持多角形確保機構
WS-5(Waseda-Shoes No.5)
・研究背景と目的
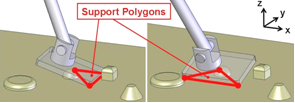
2足歩行ロボットが安定して歩行を行うためには単脚支持期に足底において支持多角形が確保できることが多くの場合前提条件となっています.しかし多くの2足歩行ロボットが採用している剛体平板の足底では,凹凸の多い面を歩行しようとする場合に左下の図の様に満足な支持多角形を構成できず安定した歩行が困難となってしまいます.このような問題を解決するために,凹凸が複数ある路面に接地する場合においても右下の様に満足な支持多角形を構成できるような足部自体が能動的に支持多角形を構成する足部機構の開発を目的としました.
|
|
|
Fig.1
剛体平板の足底で凹凸を踏んだ場合の支持多角形
|
Fig.2
セミアクティブ適応接地支持多角形確保機構を用いて凸凹を踏んだ場合の支持多角形
|
TOPへ戻る
・WS-1Rにおける問題点
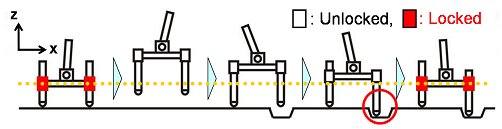
・WS-1Rの動作概要
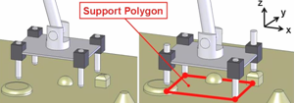
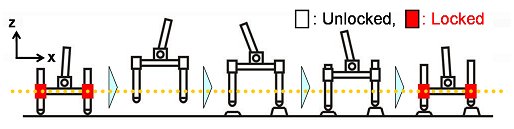
WS-1R(Waseda-Shoes No.1 Refined)は足底4隅に受動的に動く各支持点を持っており,この各支持点が受動的に動くことにより凹凸路面にならいます.
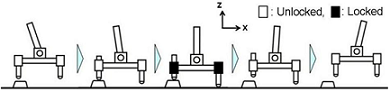
各支持点にはそれぞれ接地を感知するスイッチが設けられており,4つの支持点全ての接地を感知すると各支持点がロックされ,速やかに支持多角形を構成・保持するというものです.そして足が地面から離れると同時にロックを解除します.機構動作の流れは下図のようになっています.

|
|
|
Fig.3 WS-1R
|
Fig.4 WS-1R
支持点詳細図
|
|
|
Fig.5 WS-1R
の動作原理
|
しかし,このような動作原理では,支持点すべてが凸部に乗り上げてしまうような路面,そして凹路面に対して適応することができません.前者の場合は本来の足部の基準面よりも高い位置でロックされてしまうため,歩行が不安定になってしまいます.そして後者のに凹路面については立脚期になってもすべての支持点が路面に接地することができないためロックをかけることができません.
|
|
Fig.6
支持点すべてが凸部に乗り上げる路面
|
|
|
Fig.7
凹部を含む路面
|
・WS-1Rの機構原理
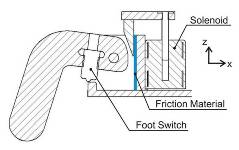
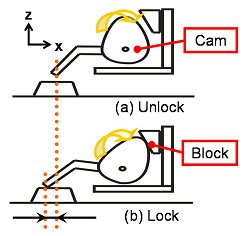
WS-1の接地検知は足先に取り付けられたマイクロスイッチによって行われ,ロック機構はカムを用いた機構を採用しています.足部機構4隅に配置される支持部の基本的な構成は下図のようになっています.支持点が上下に動くとカムが回転するようになっており,ロック動作を行う時はブレーキブロックをカムと摩擦材との間に挟んでカムの時計周りへの回転を抑えることで,支持点が更に上方向へと移動する事を妨げ,ロックを行います.
Fig.8 WS-1R
の機構原理
|
しかし,ならい動作に回転関節を用いているため本機構原理ではどうしても横方向のすべりが生じてしまうという問題があります.たとえば,凸部に乗り上げた場合,ならい動作による横滑りにより凸部から滑落し,それが原因で歩行が不安定になってしまうことが考えられます.
|
|
Fig.9
適応時における横すべり
|
|
・新たに考案した動作原理および保持機構
・動作原理
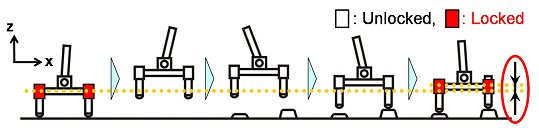
WS-1RのようなスイッチのON/OFFによる路面検知でロックをかける方法をやめ,立脚時,足部がパターン通りの高さになった際にロックをかけることにより,支持点すべてが凸部に乗り上げる路面に対しても他方の足部に対して足部高さを基準面を一定に保つことが可能です.
|
|
Fig.10
支持点すべてが凸部に乗り上げる路面への適応
|
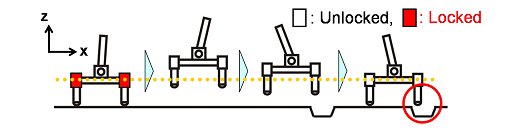
また,支持点の移動量を検知できるようにし,その可動域の中間位置を基準面とします.遊脚時にはロックを解除し支持点の自重により落とし,路面に向かって伸びた状態にして余裕を持たせることにより凹路面にもならえます.そしてロックは先程と同様に足部がパターン通りの高さになった際にかけます.
|
|
Fig.11
凹部を含む路面への適応
|
これはWS-1Rの爪部の可動値を測定できるようにすれば導入することができます.しかし,このように爪部可動域の中間位置を基準面としますとならえる凹凸高さが半分になってしまいます.そのためストロークを伸ばそうにも,路面へのならい動作における横滑りがより顕著になってしまうという問題が生じてしまいます.
・新保持機構の提案
上記のことから,保持機構としては横滑りが生じず,かつストロークを大きく取れるものが望まれます.
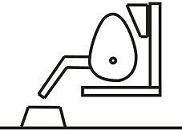
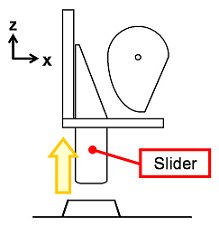
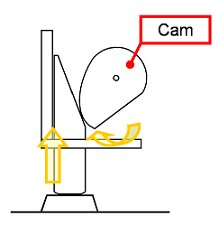
そこで新たに,支持点に直動式スライダを用いた保持機構を考案しました.動作としては,スライダが路面に対してならい,そして任意の位置でカムをアクチュエータにより回転させ,スライダの幅が狭まっていく部分に食い込み上方向への移動にロックをかけるというものです.これならばならい動作が直動であるため横すべりは生じず,かつ可動域も大きく確保することが可能です.
Fig.12
新保持機構概要
・WS-5(Waseda-Shoes No.5)
・WS-5仕様
|
| 大きさ |
248x322x113 mm |
| 重さ |
2.9 kg |
| 対応高さ |
±25 mm |
| 駆動装置 |
回転式ソレノイド |
|
※全支持点により形成される支持多角形の大きさはWS-1Rのそれと同じです.
|
|
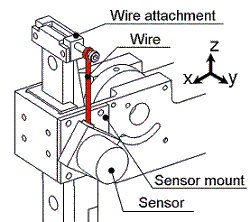
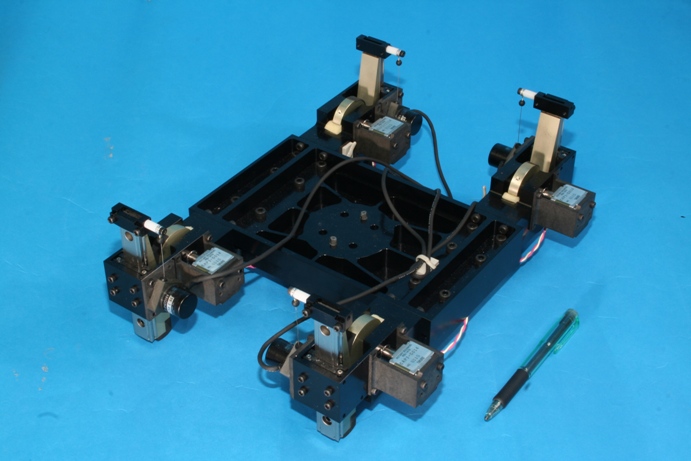
・機構詳細
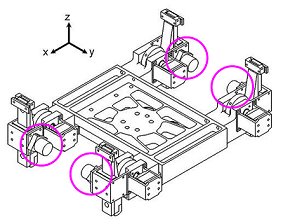
足部機構の4隅に配置されたスライダは上下動のみフリーとなっており,これが上方向に向かって縮むことにより路面に対して適応します.この機構はブレーキ力をスライダとカムによる摩擦力で発生させるため,高出力のブレーキ等を用いることなく,実際に使用されているアクチュエータはロックを掛けるためのカムの回転運動を発生させるためのロータリソレノイドのみです.
また,スライダ部の横にはセンサ(リニアスケールエンコーダ)が配置されており,スライダに上下動の連動して取り付けられたワイヤが伸縮し,そのワイヤ長によりスライダの位置を検出できるようになってます.
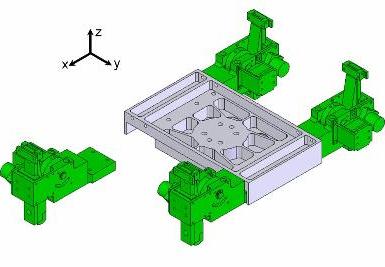
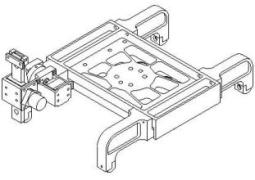
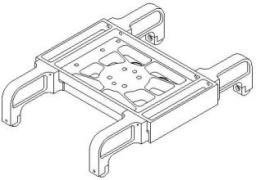
さらにWS-5は,脚部に直接取り付けられているベース部に対して,モジュール化された4隅の支持点を脱着することができ,路面に適応できる支持点,適応しない支持点を用いて下図のように足部機構の構成を変えられます.
|
|
|
Fig.14 支持点3つ固定の足部機構
|
Fig.15 全支持点固定の足部機構
|
・実験映像
|
|
|
不整地路面歩行実験
板の厚さ: 20 mm
歩行周期: 2.04 s/step
歩幅: 0.2 m
|
|
|
|
|
足部全支持点が乗り上げるような
不整地路面における歩行
板の厚さ: 20 mm
歩行周期: 2.04 s/step
歩幅: 0.2 m
|
|
|
|
|
足部支持点が凹部を踏み込むような
不整地路面における歩行
板の厚さ: 20 mm
歩行周期: 2.04 s/step
歩幅: 0.2 m
|
|