Bipedal Locomotor Group
WL-15
(Waseda-Leg No.15)
Research Purpose
We have been studying the mechanism and control of bipedal robots since 1967, from the standpoint that the expected locomotion form of a humanoid is ultimately a biped walking. In these researches, we have developed many bipedal walking robots and humanoid robots, such as WABOT (Waseda Robot) series, WL (Waseda Leg) series and WABIAN (Waseda Bipedal Humanoid).
Our new research on WL-15 (Waseda-Leg No.15) was started from the idea of developing a bipedal robot as a leg module for robotic systems including humanoids, which is sufficient for practical use. We aim to develop a multi-purpose bipedal locomotor that is totally independent from what is loaded on the upper body, which enables the users to design the upper part of the robot to fit their needs.
As legs of WL-15, we have adopted a pair of 6DOF parallel mechanisms. As for the bipedal robots studied so far, most of them use serial link mechanism for their legs. In comparison with these robots, WL-15's leg mechanism has so many advantages such as easily calculated inverse kinematics, high positioning accuracy, high mechanical rigidity and high output power, which enables it to carry heavy loads and walk at high speed. As an application, we suppose the use of WL-15 in the fields of welfare, as a walk support machine or a bipedal vehicle as an alternative to wheelchairs, which can go up and down stairs.
 |  |
| Fig.1 Expected Applications |
|---|
WL-15 Overview
We have developed a bipedal locomotor, WL-15 (Waseda-Leg No.15) having a pair of 6DOF parallel mechanisms as legs. WL-15 is highly independent, with everything including battery loaded on its waist. As a power supply, we used the Ni-MH battery made by SANYO Electric Soft Energy Co.
 | 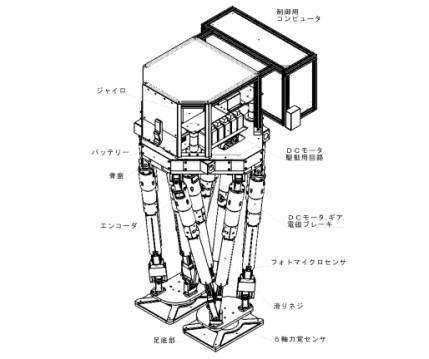 |
| Fig.2 Photo of WL-15 |
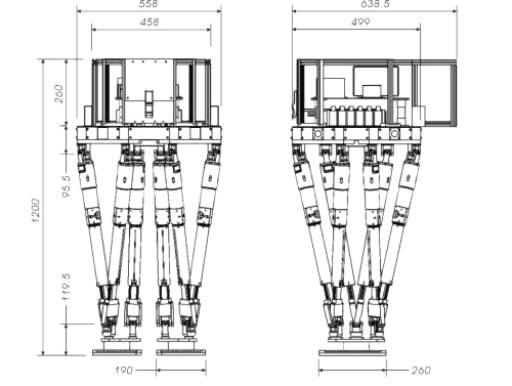
Fig.3 Assembly Drawing of WL-15 |
|---|
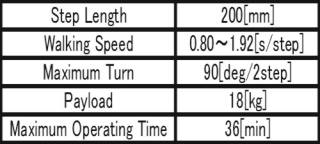
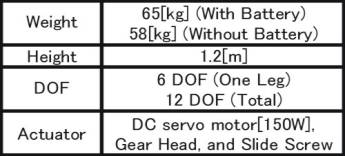
Specifications
 |
 |
 |
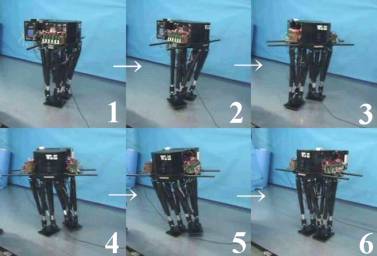
| Forward Walk 4 step |
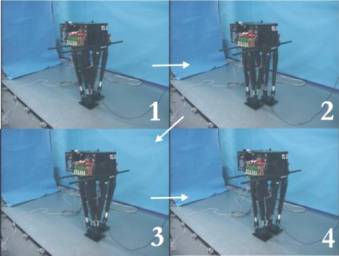
90 deg Turn/ 2 step |
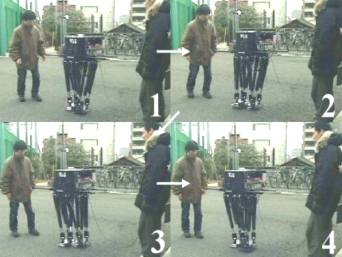
Outside Walk |
|---|
Acknowledgement
This study was supported by TMSUK Co., Ltd. and SANYO Electric Soft Energy Co.