【2足ロコモータ班】
WL-15
(Waseda-Leg No.15)
⊂本研究の目的⊃
高西研究室では,人の住環境に最も適応しやすい移動形態は2足歩行型であると考え,1967年よりWABOTシリーズ,WLシリーズ,WABIANと多くの2足歩行ロボットとヒューマノイドロボットの研究を行ってきました.
本研究は「ヒューマノイドロボットを含む様々なロボットシステムの移動用モジュールとしての2足ロコモータ」という発想からスタートしました.これは下半身のみで自立歩行が可能な2足ロコモータをわれわれが提供し,使用者がその要求に応じて上半身を架装するというものです.
特に脚部の機構にはアクチュエータを並列に配置するパラレルリンク機構を採用しました.従来,2足歩行ロボットの機構にはアクチュエータを直列に配置するシリアルリンクが用いられてきました.しかし,パラレルリンク機構にはシリアルリンク機構と比べて精度や剛性,出力が高く,逆運動学が容易であるなどといった特徴があります.つまり,重量物を積み,高速な動作が可能になるといったこれらの特徴は2足歩行ロボットにとって有利な要素であると考えています.これにより,2足歩行に関するノウハウがないユーザでも容易に2足ヒューマノイドロボットを構成することや,階段や斜面を昇降できる歩行障害者用の移動椅子など新たな移動機構の開発を研究目的としています.
 |  |
| Fig.1 イメージ図 |
|---|
⊂WL-15の概要⊃
脚部にスチュワートプラットフォーム型パラレルリンクを用いた,片脚6自由度,全12自由度を有するWL-15(Waseda Leg ? No.15)を開発しました.バッテリを含む全ての必要な要素を搭載し,独立したロボットととして開発しています.電源システムは,主電源としてニッケル水素バッテリを採用しています.
 |  |
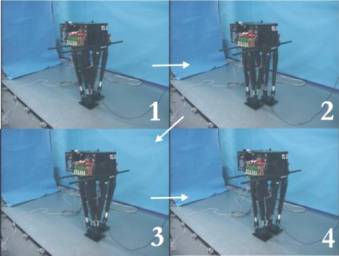
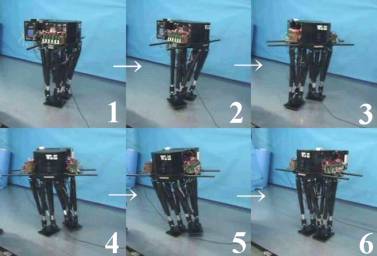
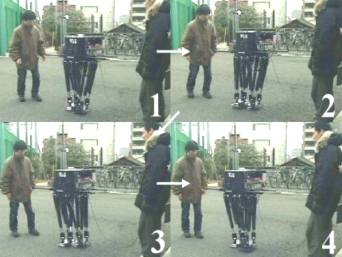
| Fig.2 全体写真 |
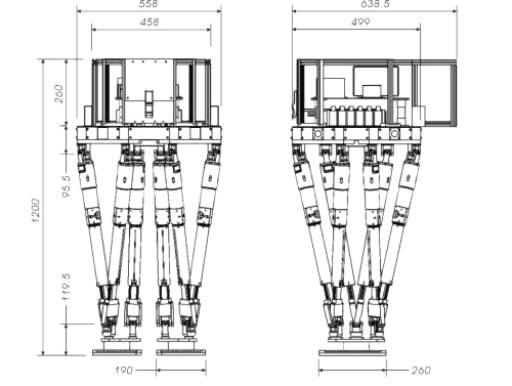
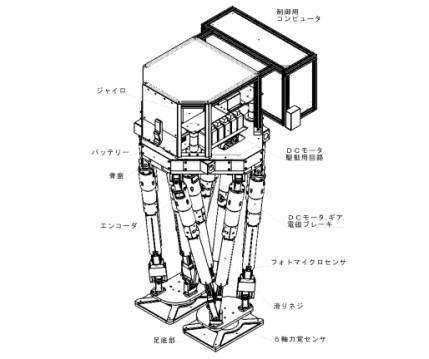
Fig.3 概要図 |
|---|
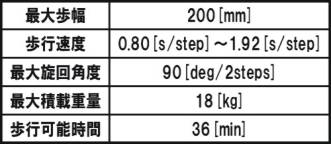
⊂WL-15のスペック⊃
謝辞
本研究は,株式会社TMSUKより全額出資を受けて行われています.また,本研究で用いられたバッテリは三洋電機株式会社ソフトエナジーカンパニーにご提供いただきました.研究にご協力いただきました両企業に感謝致します.