As stated previously, the biped robot, WL-16, has been developed as a leg module that is sufficient
for practical use as a multi-purpose locomotor of the robot system.
Therefore, many functions were required to accomplish a high independence.
Specifically, it had to be driven by a battery, able to carry a heavy payload and so on.
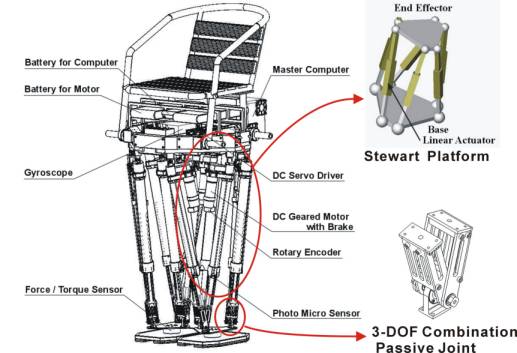
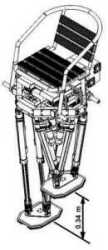
In order to satisfy these functional requirements, we have adopted 6-DOF parallel mechanisms.
Taking advantage of the mechanical rigidity of the parallel mechanism,
we have succeeded in reducing the weight by means of using polyacetal resin
in many of the components instead of metals, and also by cutting down on the weight of the gears, motors,
motor drivers and other elements. By using electromagnetic brakes, it was possible to keep the robot
in the same posture with less energy consumption.
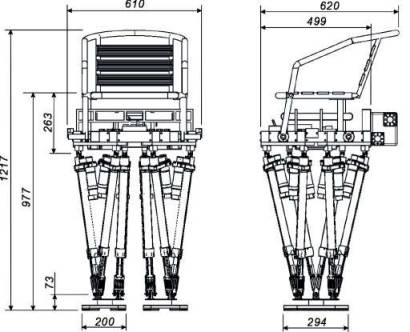
WL-16' s gross weight is 52 kg including a 7 kg battery, and its height about 1.2 m.
Using the biped robot, many applications are expected.
An application of the locomotion mechanism of a humanoid robot in which wheels and
crawlers are used is conceivable, and the applications of a locomotion mechanism of a walk support machine,
a wheelchair and for the medical-treatment field are also conceivable.
Applications for new intelligent mobility or a new entertainment vehicle that people can drive are also interesting.
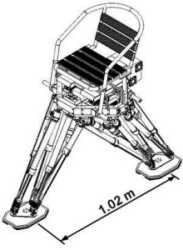
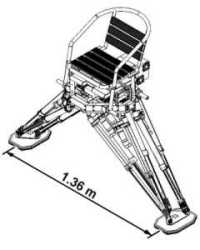
Now that we have developed the basic walking
stabilization control for an uneven surface using WL-16,
our next goal is to realize walking in the human-living
environment. We will also continue to study more
intelligent walking control methods for more complex
unknown environments.