|
(Waseda Q:Kyudai Endoscope assist Manipulator) |
![]()
|
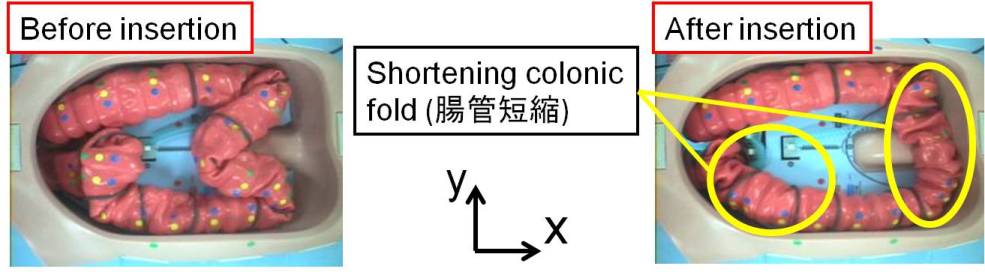
1. Shortening colonic fold (SCF) |
|
|
|
|
 |
|
|
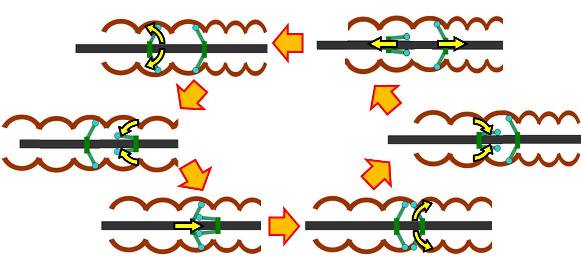
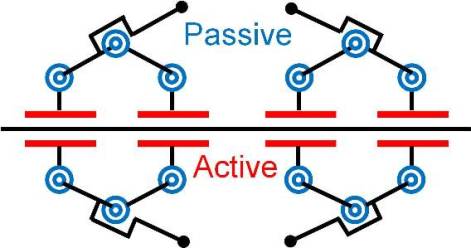
So, we has devised that robot do SCF. The idea is that the robot hauls intestinal wall by operating as shown in the figure below, and then achives SCF. |
|
 |
![]()
|
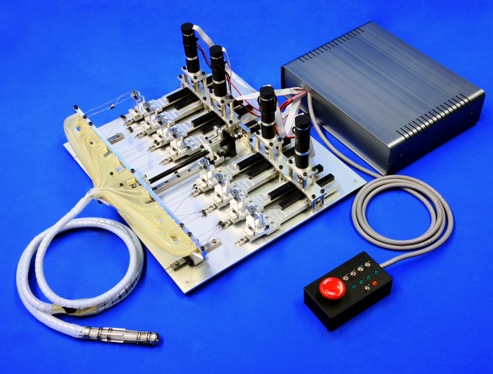
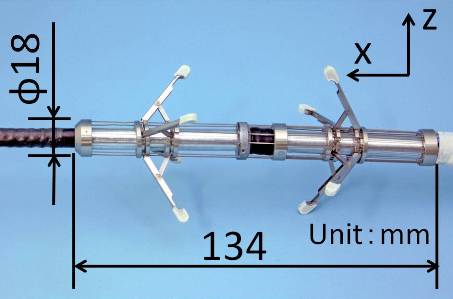
2. Prototypes 2.1. WQEM-1(Waseda Q:Kyudai Endoscope assist Manipulator No.1) | ||
|
|
||
 |
 |
|
|
|
||
| Page Top |
|---|
![]()
|
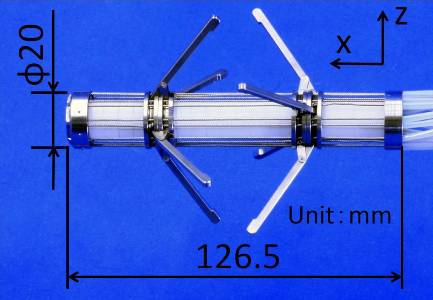
2.2. WQEM-2(Waseda Q:Kyudai Endoscope assist Manipulator No.2) |
||
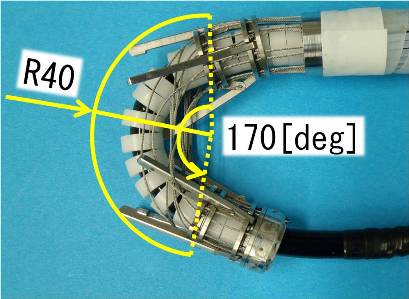
We developed second prototype WQEM-2 that had new mechanism to bend passively at flexure
colon and aim of improving its hauling speed with the same hauling mechanism remained. |
||
 |
 |
|
|
|
||
| Page Top |
|---|
![]()
|
|
||
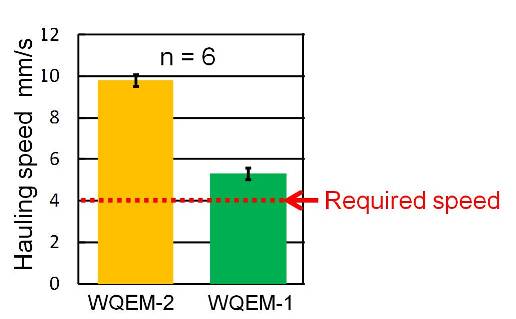
First, we measured hauling speed of WQEM. We drived WQEM in the colon model placed as
straight, and measured the length of the model hauled during 30[s]. The hauling speed
calculated from the rusults is shown in below. |
||
 |
||
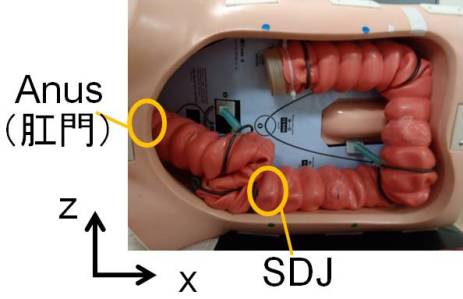
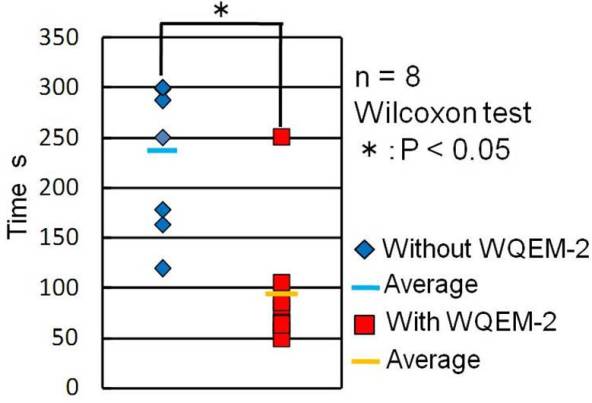
Second, we asked doctors to insert the endoscope with/without WQEM-2 as simulations. The
measured time required to pass the sigmoid descending junction (SDJ) from the anus is shown
below. |
||
 |
 |
|
![]()
|
3. Future Works |
|
Some doctors who worked with us said damage to the colon was concerned. Thus development
of devices with high safety is the major issue. And it is also an issue that WQEM couldn't
operate in entire colon. We think it is needed to develop that the stiffness transition
mechanism wchich have lower stiffness in the flexible state for passing the flexure
colon. |
| Page Top |
|---|