![]()
1. 腸管短縮 |
|
|
|
 |
|
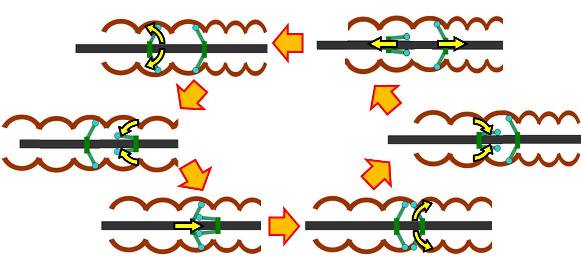
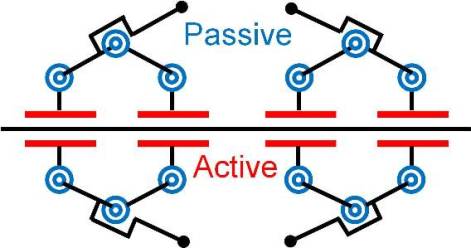
そこでこの腸管短縮をロボットにより行うことを考案しました.下図のようにロボットが動作することで,腸壁を手繰り寄せて腸管短縮を実現するというものです. |
|
 |
![]()
|
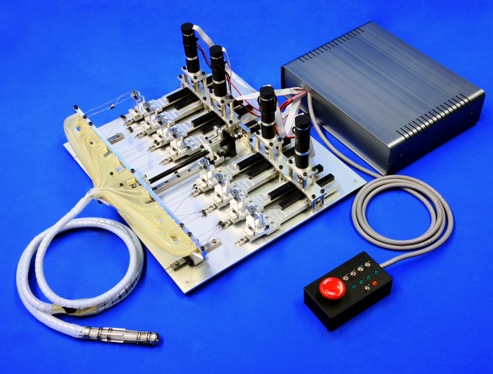
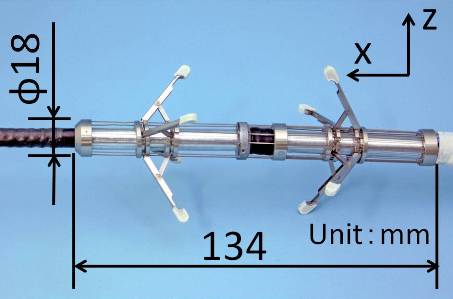
2. 試作機 2.1. WQEM-1(Waseda Q:Kyudai Endoscope assist Manipulator No.1) | ||
|
|
||
 |
 |
|
|
||
| ページトップへ |
|---|
![]()
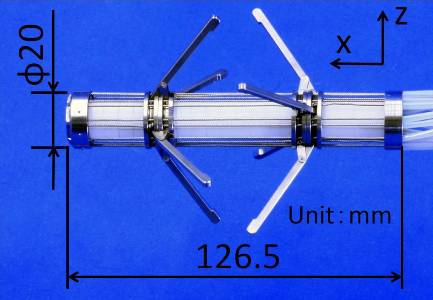
2.2. WQEM-2(Waseda Q:Kyudai Endoscope assist Manipulator No.2) |
||
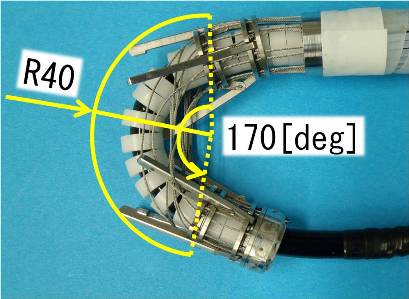
WQEM-1の手繰り寄せ機構はそのままに,大腸湾曲部で受動的に屈曲可能となる機構を搭載し,さらに手繰り寄せ速度の向上を目指して試作機2号WQEM-2を開発しました. |
||
 |
 |
|
|
||
| ページトップへ |
|---|
![]()
|
||
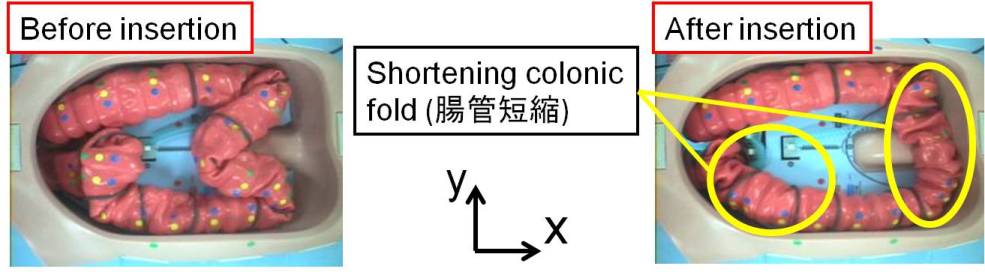
はじめにWQEMによる手繰り寄せ速度の計測を行いました.実験方法は直線状に配置した大腸モデルを手繰り寄せ,30[s]で手繰り寄せた大腸モデルの長さを測定するというものです.その結果から算出した手繰り寄せ速度を以下に示します. |
||
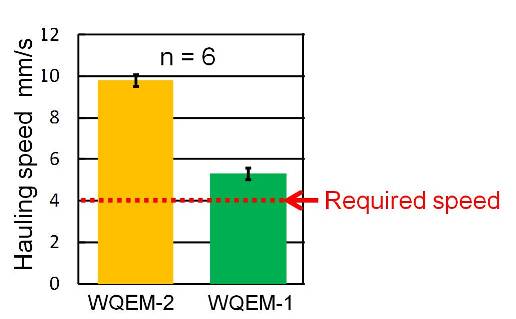 |
||
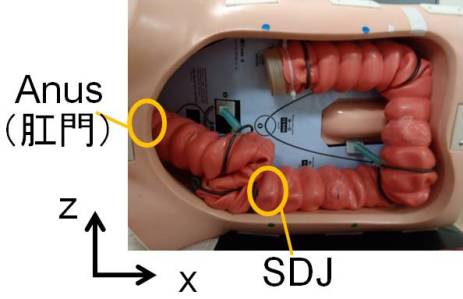
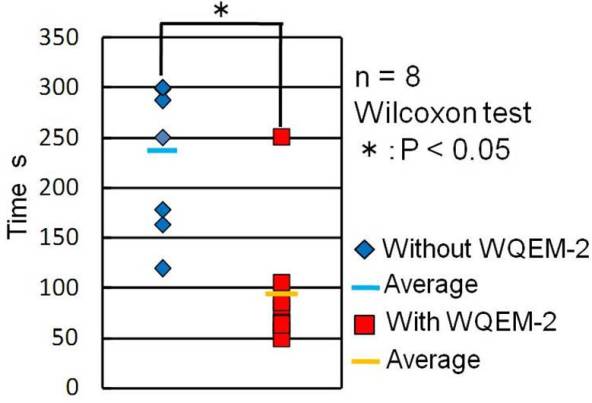
また,医師にWQEM-2を実装した場合としない場合とで,大腸モデルへの模擬挿入を依頼しました.この際に肛門からS 状結腸下行結腸移行部(SDJ)を通過するまでに要した時間を測定した結果を以下に示します. |
||
 |
 |
|
![]()
3. 今後の展望 |
|
実験に協力頂いた医師から大腸へのダメージが心配であるという意見を頂きました.よって,安全性の高いロボットを開発していくことが今後の大きな課題であります.また,大腸全域での使用が実現できていないことも課題として挙げられます.横行結腸の手繰り寄せを行うためには,柔軟状態でさらに剛性が下がるような硬度可変機構の開発が必要だと考えています. |
| ページトップへ |
|---|