
![]()
|
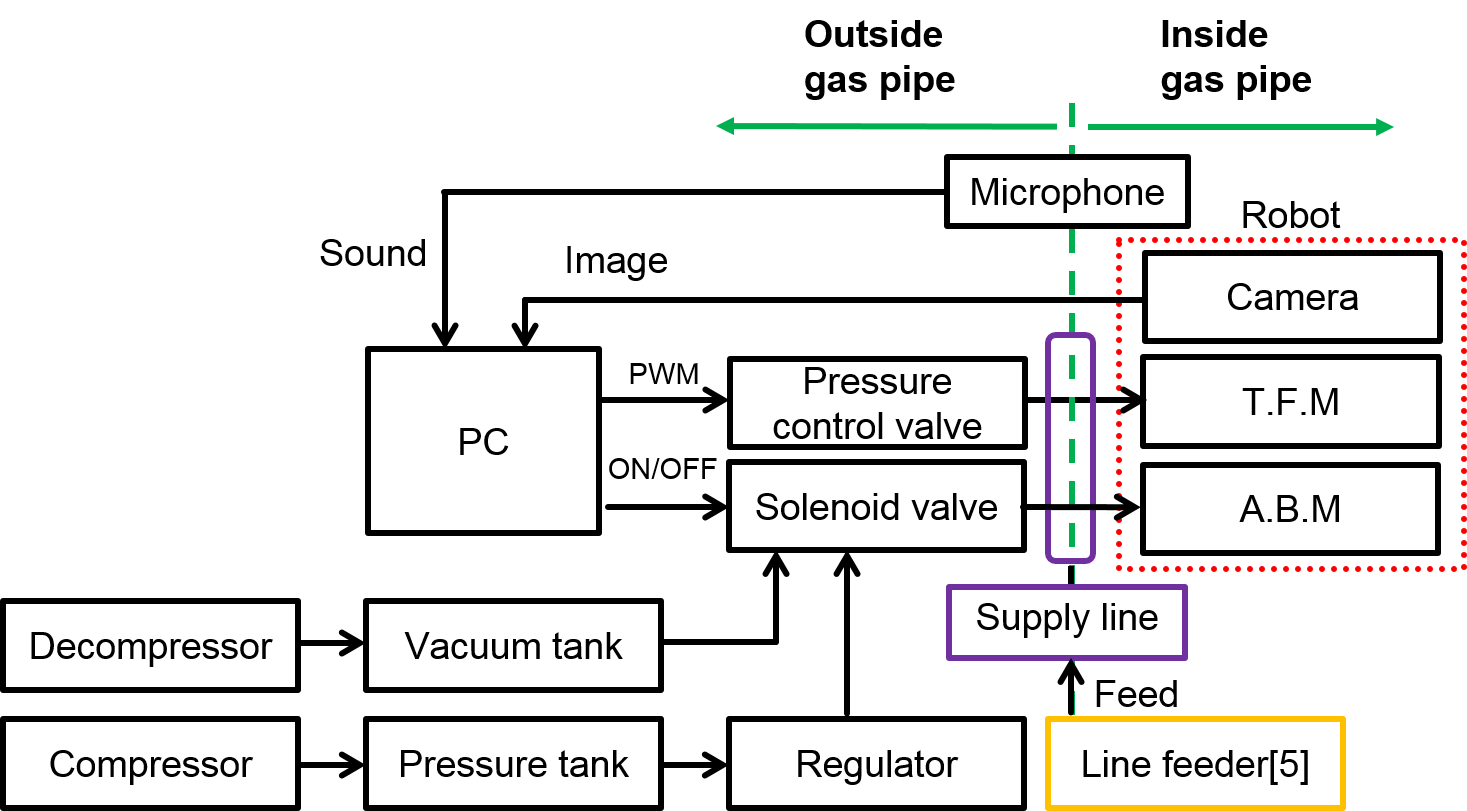
Introduction In this study, we have been developing a pipe inspection robot; WATER(WAseda Tokyogas Endscope Robot), for inspections of underground pipes lines. |
![]()
|
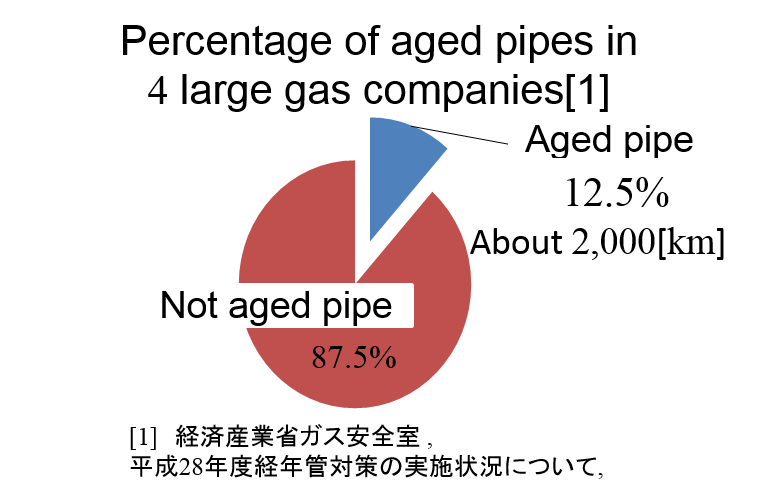
Many pipes lines are lain underground in urban areas for gas supply. Most of them are made by steel pipes.
|
![]()
|
This robot consists of two balloons and an extension hose, and locomotes in pipe lines like an inchworm. At the top of the robot, a pneumatic bending module and a camera are mounted. This robot is designed to locomote in steel pipes with an inner diameter of 28[mm] and 53[mm]. This robot is able to locomote horizontally and vertically in these straight steel pipes. In addition, it can pass through curved pipes. In a verification experiment using a mock pile line, this robot could pass through 8 curved sections in 10 minutes. 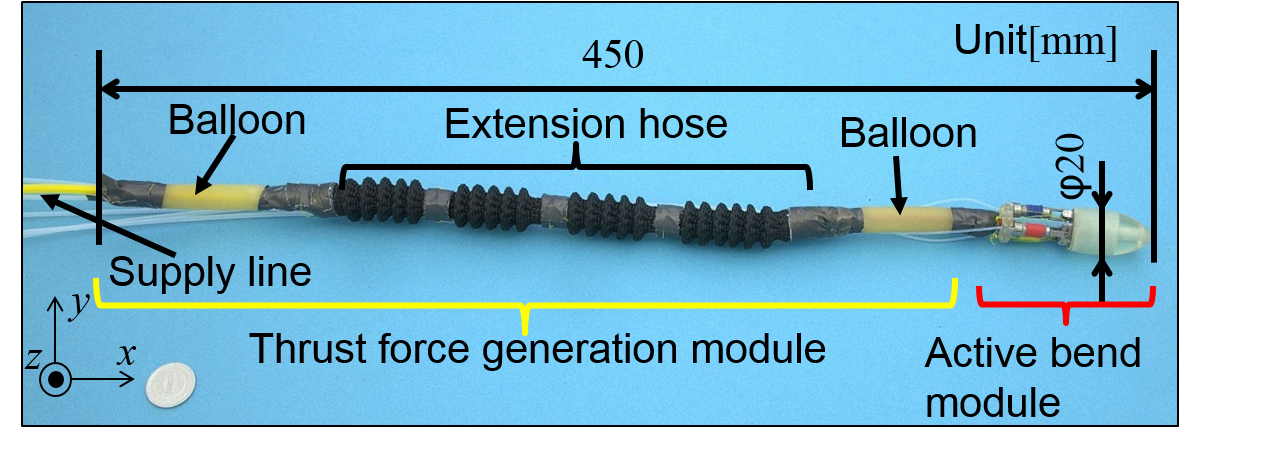

|
![]()
|
Movie
|
8 curved pipe locomotion |
WATER |
![]()
| Acknowledgment
This research is conducted under cooperation with SIP "infrastructure upkeeping, renewal and management technology" (Management corporation: JST). We would like to express our thanks to Tokyo Gas Co., Ltd., SolidWorks Japan K. K. for helping us to develop the robot. |
![]()
| Relation |

Tokyo Gas Co., Ltd. |
| Page Top |
|---|
![]()