
![]()
|
研究目的 本研究では,地中に埋設されたガス管の内部を検査するため,ガス管内を移動し、内部画像を取得するロボットシステムWATER(WAseda Tokyogas Endscope Robot)の開発に取り組んでいます. |
![]()
|
日本では、高度経済成長期に建設されたインフラの老朽化が進む中で、それらに起因する事故リスクの低減が課題となっています。同時に、少子高齢化が進む中で、熟練技術者の確保や維持管理コストの高まりが課題となっています。ライフラインの多くは道路下に埋設されているため、老朽化の状況を確認するためには、道路を掘削または占用し、カメラ・センサー等で調査を行う必要があり、特に都市部ではこれらの作業の実施が困難となることもあります。その中で、ガス管などの地下埋設物においては、非掘削で地上から管内部のトラブル箇所を検査し、修理することが可能な新たな技術が求められています。そこで本研究では、トラブル箇所を短時間で簡単に特定することを目的として、ガス管内を移動して、カメラで内部を検査するロボットシステムの開発を行っています。 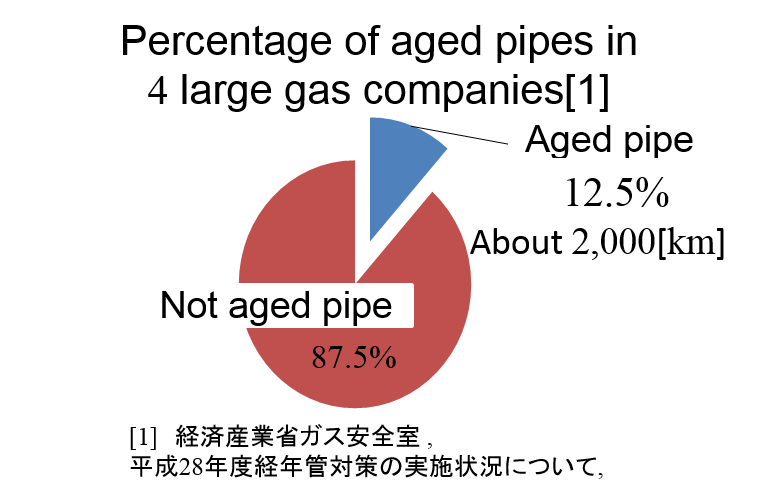
|
![]()
|
本ロボットは,内圧の変化により伸縮する伸長ホースとその前後2つのバルーンにより構成され,尺取り虫のように推進します.ロボット前方には,空気圧駆動の屈曲モジュールとカメラを搭載しています.内径28[mm]と53[mm]の直線配管の水平・垂直面内走行や,内径28[mm]で8箇所の湾曲部のある配管の通過が可能です.下に示す透明模擬試験配管を10分で通過することができます. 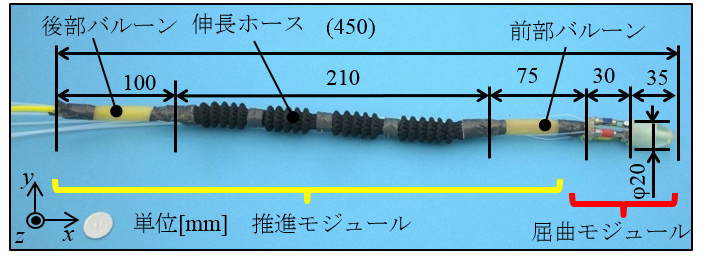

|
![]()
|
Movie
|
8 curved pipe locomotion |
WATER |
![]()
| 謝辞
本研究は,SIP「インフラ維持管理・更新・マネジメント技術」(管理法人:JST)との連携のもとに実施されております.また,研究に協力して頂いた株式会社東京ガス様,3DCADソフトウェアをご提供して頂いたソリッドワークス・ジャパン株式会社様に感謝致します. |
![]()
| 研究協力 |

東京ガス株式会社 |
| ページトップへ |
|---|
![]()