
Robot System for Carotid
Ultrasound Diagnosis
WTA-2
Waseda Tokyo Women's Medical Aloka
Blood Flow Measurement Robot System
No.2
日本語/English
1.Research background
The cause of one's death
|
About 60 percent of the Japanese causes of death are the neoplasm (cancer), the cardiac disease (cardiopathy), and the brain blood vessel disease (apoplexy), which are the three major lifestyle-related illnesses. Among these diseases, the main causes of a cardiac disease and a brain blood vessel disease are arteriosclerosis. Wave Intensity is one of the effective indeces which evaluates the circulatory system. We have been developing the Robotic Carotid Blood Flow Measurement System WTA-1RII. By using the robot system, the measurement time has significantly been reduced. Also abdominal ultrasound is effective in early detection of the neoplasm (cancer) with which about 30 percent of the Japanese have passed away. Therefore we focused in designing a robotic-assisted system able of providing support to doctors while performing the abdominal ultrasound. |
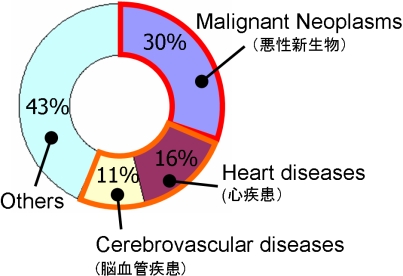
2008, Ministry of Health, Labor and Welfare |
Abdomen measurement
During the diagnosis of abdomen by ultrasound, sometimes the doctor is required to press the measurement point by probe. This is done in order to remove the gas in the organ which makes obtained image ambiguous. Also the doctor's arm should be kept at the same position for long time. These are physical stress for doctors. Therefore, in this research, we have developed the robot arm which is able to perform as a force assist for pushing the probe and arm rest for the doctors' arm. Finally we have conducted a set of experiment to verify the effecitiveness of the robot system.

2.Hardware
The robot WTA-2 is shown in the following figures. End part of the arm can be replaced in respect of the each purpose. Of course the parallel link manipulator which has been developed in our past research can be attatched to perform the measurement of carotid blood flow.
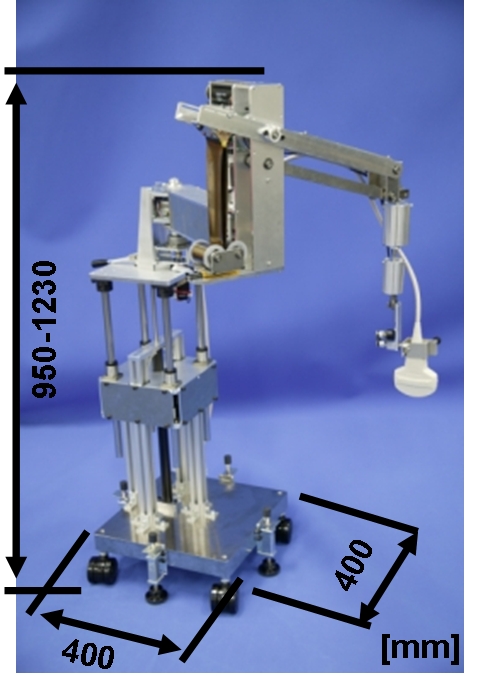
WTA-2
Probe assist
|
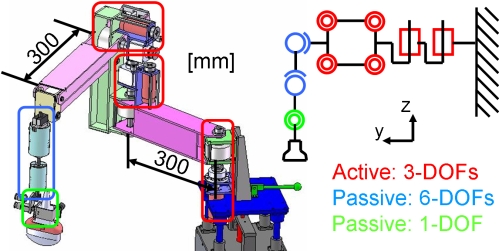
The proposed robot has active 3-DOFs (red part in the right figure), which could apply force of maximum 6[kgf]. In order to control the probe orientation, there are passive 6-DOFs (blue part in the right figure) made of two ball joints, each of which contains the electric magnet brake. The magnet brakes can hold maximum 2 [kgf], and they are used as torque limitters. Also the end of the manipulator has passive 1-DOF (green part of the right figure) for scanning movement. 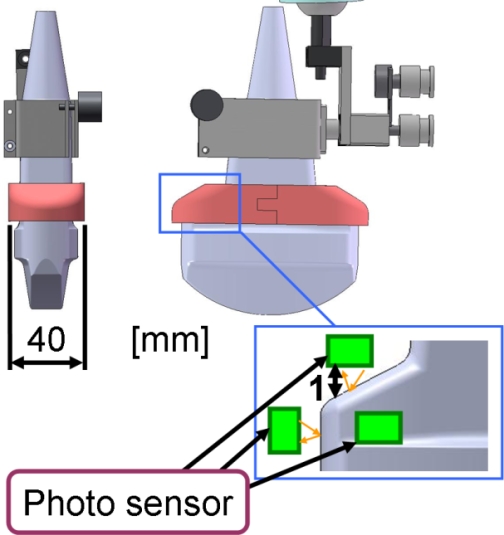
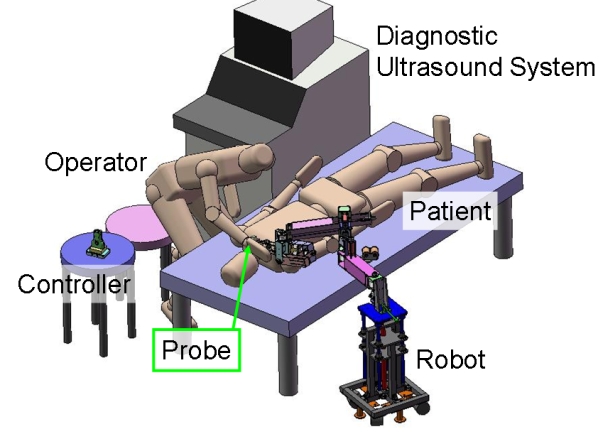
Controller Controller should be between the probe and the hand because doctors want to control probe by holding probe by their hands and purpose of this robot system is force assist. We haveembedded three photo-interrupters inside the plastic probe case, which detects the deformation of the case caused by the force by measuring the distance between probe and plastic case. Comparing with the other force sensor, the photo devices are low cost, samll, low noise. The robot arm follows the force applied by the doctor. Therefore, doctors can controll probe by holding the probe. |
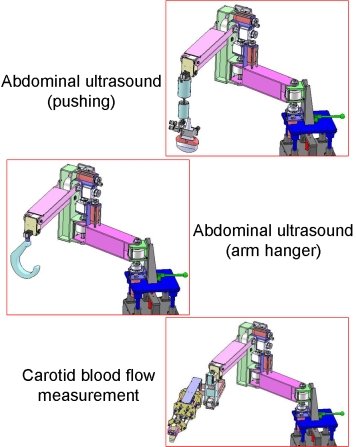
Configuration of degrees of freedom The operation of abdominal ultrasound is as shown in the right figure. The operator grasps the controller which shape is as probe cover, then press it towards the direction which the operator wants to move probe. The robot arm applies the press force to the probe according to the force applied to the controller. By using a passive 1-DOF, the scanning by ultrasound probe is performed. 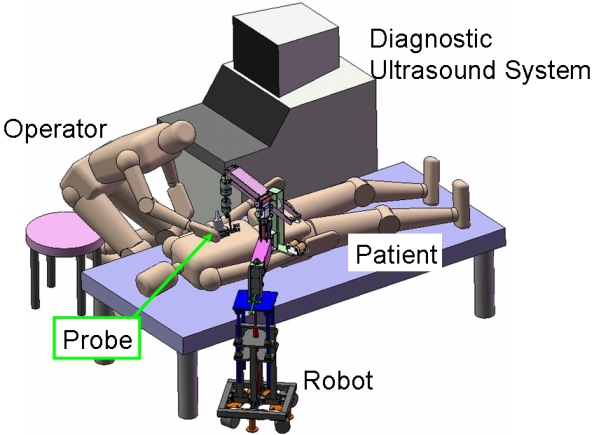
Probe assisted measurement |
Arm assist
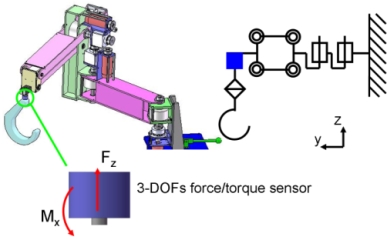
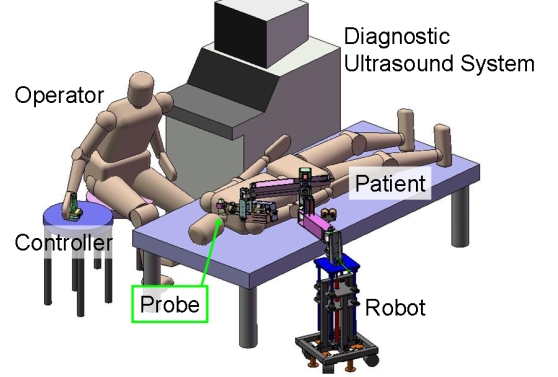
We have designed the arm hanger to support the operator's arm. Required force to hang the arm is about 3[kgf]. 3-DOFs force/torque sensor detects the force applied to the hanger, and the robot arm moves towards the direction which the force applied to. Operator performs abdominal ultrasound as the fgure below.
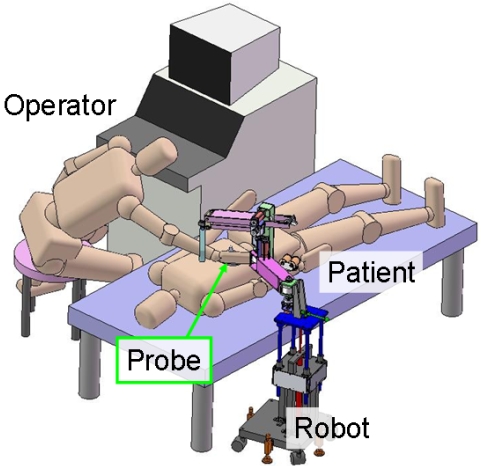
Arm assisted measurement
|
Controller
|
Carotid blood flow measurement
Carotid blood flow measurement could be performed by attaching the manipulator.
Rough adjustment
|
Fine adjustment
|
3.Performance tests
Five operators (medical doctors and ultrasound technicians) performed a ultrasound scan of abdomen of phantom using WTA-2 to evaluate the effectiveness and usability by the questionnaire.
Probe assist
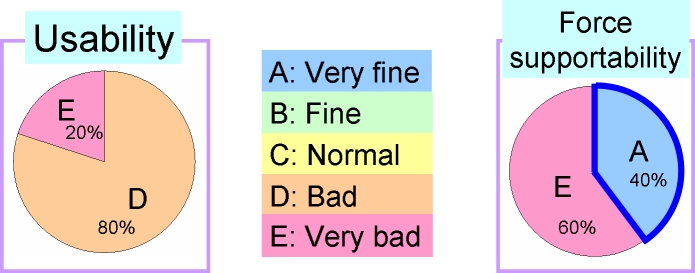
Result
As the result, low scores for the evaluation of both efectiveness and usability were obtained. Further improvement of the input device is required, so that the robot arm moves smoothly towards the direction which operator want to move. However good evaluation was given by 2 operators and their opinions were that if the robot arm move as operator intend, scan could be done only with robot’s force. Therefore, by improving the input device, the robot could be perform effectively.
Arm assist
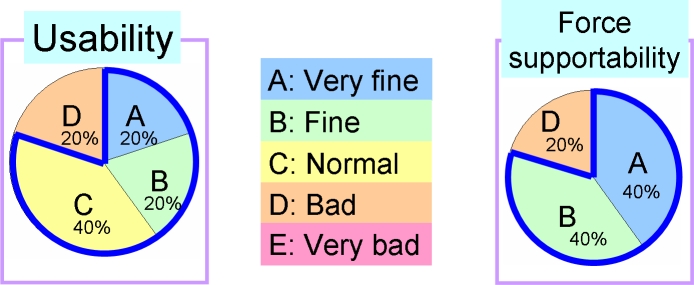
Result
As the result, the robot performed effectively. However bad evaluation was given by a doctor with opinion that arm hanger should move more flexible and its material should be soft.
4.Link
 Hitachi Aloka Medical,Ltd.
Hitachi Aloka Medical,Ltd.
 SolidWorks Corp.
SolidWorks Corp.