
腹部超音波診断補助
ロボットシステム
WTA-2
Waseda Tokyo Women's Medical Aloka
Blood Flow Measurement Robot System
No.2
日本語/English
1.研究背景
日本人の死因日本人の約6割を三大生活習慣病である悪性新生物(癌),心疾患(心臓病),脳血管疾患(脳卒中)が占める (右図参照).このうち,心疾患,脳血管疾患の主な原因が動脈硬化であり, われわれはこの初期症状を診断する指標であるWave Intensity の計測を目的とした 頸部血流計測ロボットシステムWTA-2Rの研究開発を行い計測時間の短縮等 一定の成果を挙げた. 一方,同じく死因統計の約3割を占める悪性腫瘍の効果的な早期発見の方法として,超音波による腹部のスクリーニング が挙げられる.そこでわれわれは頸部だけでなく腹部にもロボットシステムを適用することを新たな目標とした. |
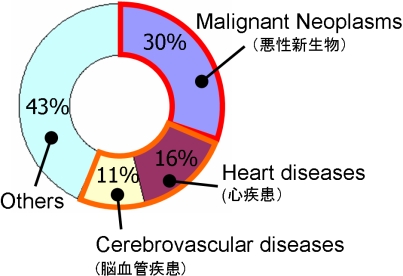
2008年度人口動態統計(厚生労働省)
|
腹部計測
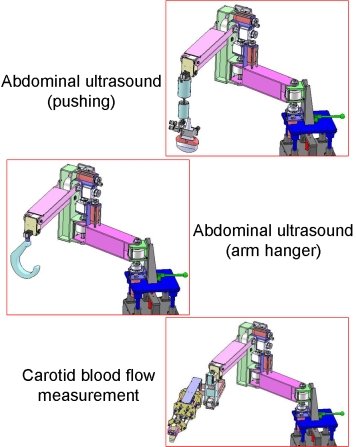
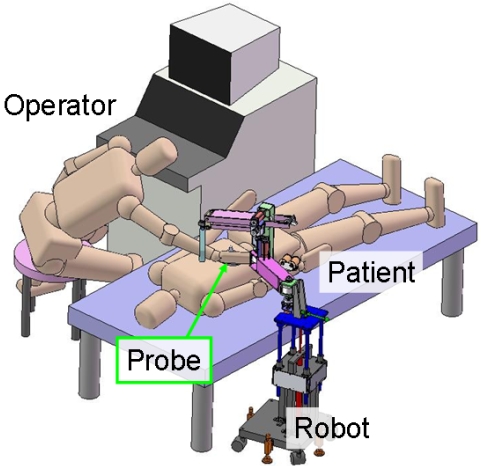
腹部の超音波診断は様々な方向から角度を変えながら広範囲をスキャンを行うが, その際に腸管ガスなどをよけるための強い圧迫動作が必要となる.また,プローブを持つ腕は長時間 宙に浮かせた状態となり,これらが検査技師の肉体的負担となっている. そこで,超音波プローブの腹部への押し込み力アシスト,およびプローブを持つ腕のアームレストの機能をもつロボットアームを開発し, その有用性を確かめることを目的に研究を行った.

2.ハードウェア構成
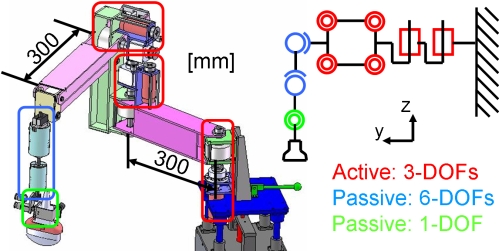
開発したロボットWTA-2を下図に示す. 先端部分を付け替え可能にすることで共通部分を有効利用できるようになっており, これまでに開発済の6自由度パラレルリンクマニュピレータを装着し, 頸部血流計測を行うことも可能である.
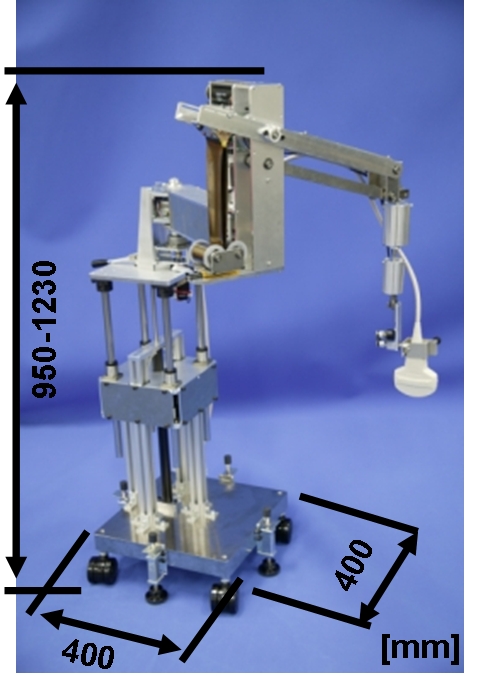
WTA-2
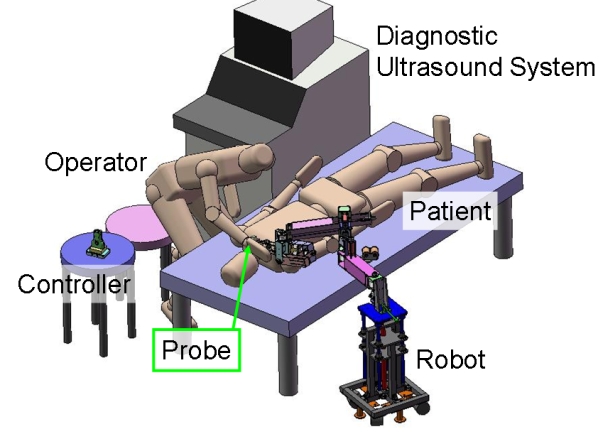
押し込み補助
|
アクティブな関節が3自由度(右図の赤い部分)であり, 最大で6[kgf]の押し込みが可能である. スイッチで切り替え可能な電磁ブレーキを備えたパッシブな関節が6自由度(右図の青い部分)であり, 姿勢の変更を行う.ボールジョイントの固定力は2[kgf]でトルクリミッタの役割も果たす. 先端にはスキャン動作用のフリーな関節が1自由度(右図の緑の部分)が存在する. 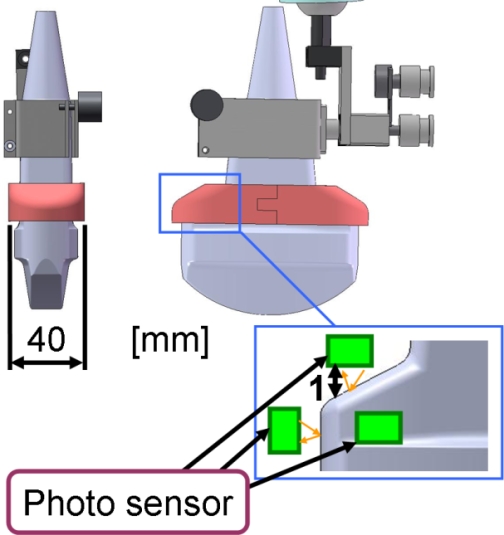
入力装置 右図のように,プローブに取り付けられたケース型コントローラを持ち, 移動させたい方向へ入力しつつ押し込む.回転1自由度を用いてスキャン動作を行う. |
自由度配置図 医師はプローブを手に持って操作することを望んでおり,かつプローブ操作の力アシストが目的なので, プローブと手の間に入力検出器が必要となる.プラスチック製のプローブカバーにより力を変位に変換し, その変位を反射型フォトセンサーで計測する入力装置を開発した.フォトセンサはひずみゲージ等と違い, アンプが必要なく,小型で安価,かつノイズが非常に少ないという特徴がある. ロボットは入力された力に追従する様動作する. これによってオペレータはプローブを握ったままロボットを操作できる. 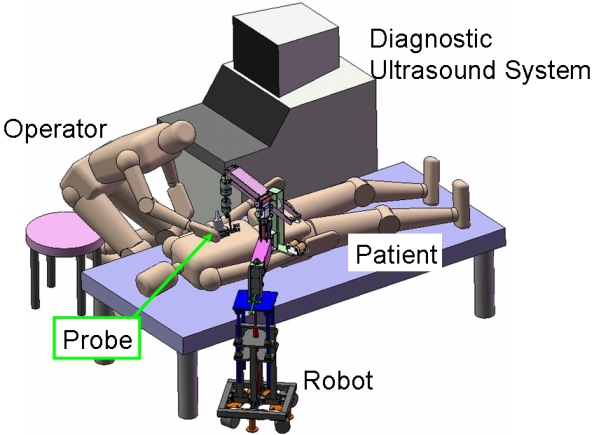
腹部押し込み補助 |
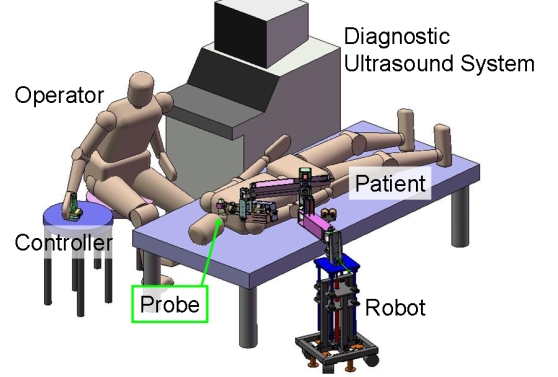
腕吊補助
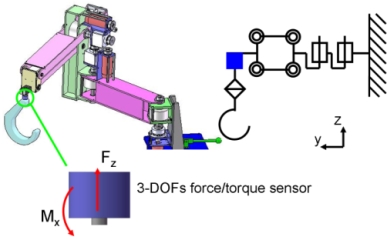
フックで腕を吊る機構を開発した. 吊ることで腕や上半身を支えるのに必要な力は,3[kgf]程度である. 3軸力覚センサでフックに加わる力を検知し,腕にならってアームが動作する. 一定以下に下がらないことで,仮想的なアームレストの役割を果たす. 腕吊補助は下図のようにプローブを持って,腕をフックに乗せてロボットアームを操作する.
腕吊補助
|
入力装置
|
頸部血流計測
先端にパラレルリンクマニピュレータを装着し, 頸部血流計測を行うことも可能である.
大まかな位置合わせ
|
微調整
|
3.評価試験
医師および超音波診断技師5名に,本ロボットを使って超音波ファントムに対して超音波診断を行ってもらい, 操作性と補助力についてアンケートによる評価を行った.
押し込み補助
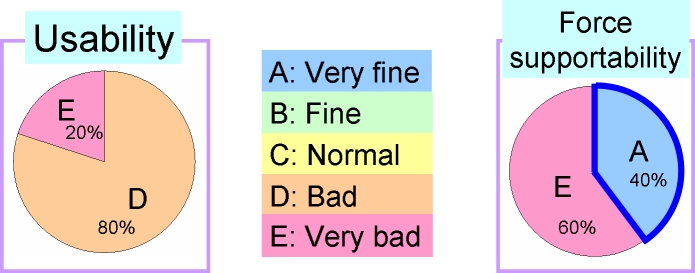
実験結果
操作性,補助力ともに低い評価となった. 操作性の改善によりアームが操作者の意図する方向にスムーズに動くようにする必要があると考えられる. ただし,超音波技師2名が補助力について評価しており, 操作性の改良により超音波技師の負担の軽減に一定の効果が期待される.
腕吊補助
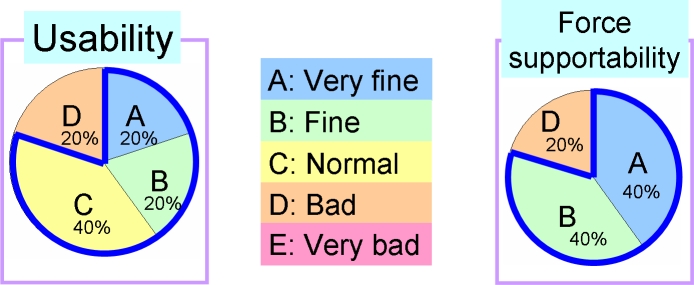
実験結果
操作性,補助力双方において良い評価が得られた.アームホルダーの材質は柔らかいものがいいという意見を頂いた.
4.リンク
|
|
 日立アロカメディカル株式会社
日立アロカメディカル株式会社
|
 ソリッドワークス・ジャパン株式会社
ソリッドワークス・ジャパン株式会社
|