概要
新生児の約15%は出生後すぐに自発呼吸が開始せず,何らかの蘇生措置を必要とします.日本では1年間におよそ100万人の新生児が生まれているため,年間10万人以上の新生児が蘇生措置を必要とすることになります.このような場合の対処法として,新生児蘇生法(NCPR)と呼ばれるガイドラインが日本周産期・新生児医学会によって設けられています.しかしながら,新生児の出生場所は病院,産科診療所,助産所など様々であり,専門医が分娩に立ち会えない事例も多いです.そのため,専門医だけでなく,分娩にかかわる全ての医療従事者(産科医,助産師,看護師など)が新生児蘇生法の訓練を行うことが重要視されています.
新生児蘇生法を普及するため,マネキンシミュレータを用いた講習会が開かれています.マネキンシミュレータを用いた訓練には,指導者の負担が大きいという問題や,臨場感が低いという問題があります.
これを受けて私たちは,ガイドラインに沿った各種シナリオが再現可能で,手技の定量的評価に基づいた助言提示機能を持つ,新生児蘇生法トレーニング・システムの実現を目指しています.2018年度には,新生児蘇生法アルゴリズムの中で対応を決める基準となる,陥没呼吸動作の再現が可能な新生児蘇生法シミュレータWAKABA-3(WAseda
Kyotokagaku Airway BAby-No.3)を製作しました.本機には,陥没呼吸の再現に加えて,これまでの研究成果である自発呼吸動作の再現と胸骨圧迫手技の計測の機能(2017年度WAKABA-2
)も引き継がれています.
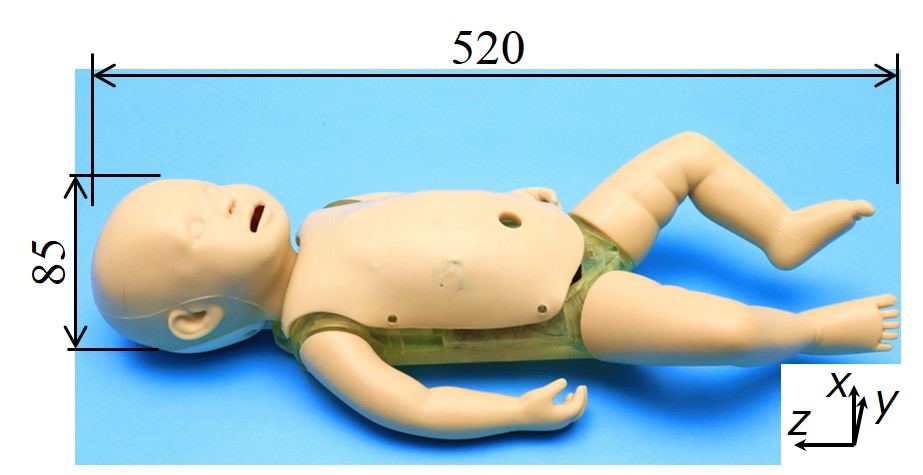
図1 WAKABA-3外観
機体の内部構造
WAKABA-3はWAKABA-1,WAKABA-2と同様に健常な新生児の平均的体格を模擬しており,顔や手足には柔軟素材を用いてヒトに近い外見となっています.また,口から肺までの気道も柔軟素材を用いており,舌や喉頭蓋,食道への分岐なども再現されています.これらの柔軟部品は,共同研究を行なう株式会社京都科学が製作しました.
WAKABA-3は,陥没呼吸動作再現機構が搭載されており,WAKABA-2で搭載された呼吸動作再現機構と胸骨圧迫手技計測機構がそのまま搭載できる構造となっております.陥没呼吸動作再現機構は,ソレノイドの吸引力とばね・皮膚の弾性力による拮抗駆動で上下動作します.陥没する位置,深さ,形状については,17名の新生児科医にアンケート調査を行った結果から決定しています.以下に機体の内部機構の写真,陥没呼吸動作再現機構の模式図,陥没時の腹部の様子を示します.
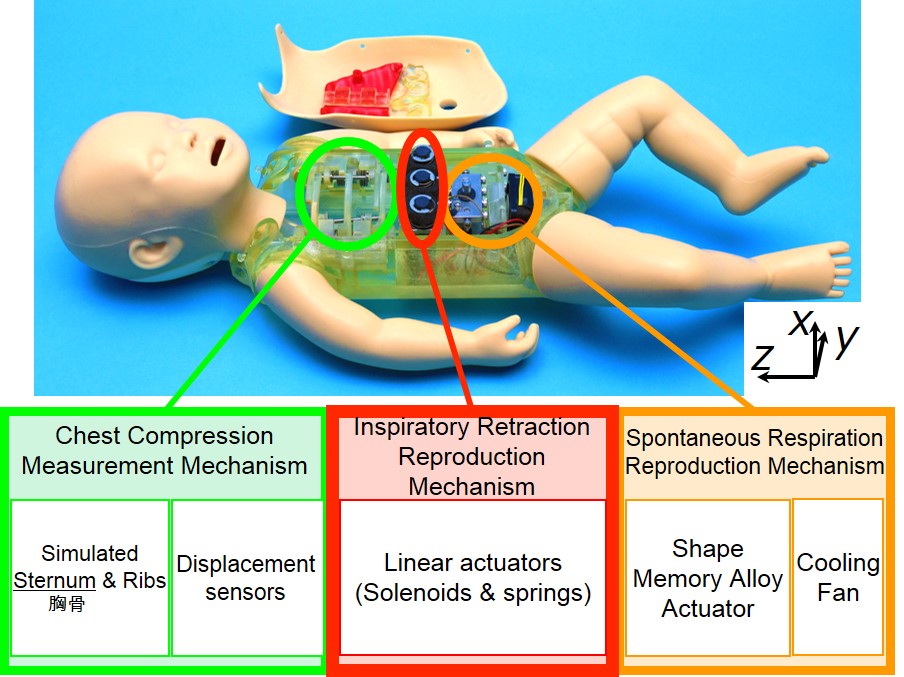
図2 WAKABA-3の内部機構
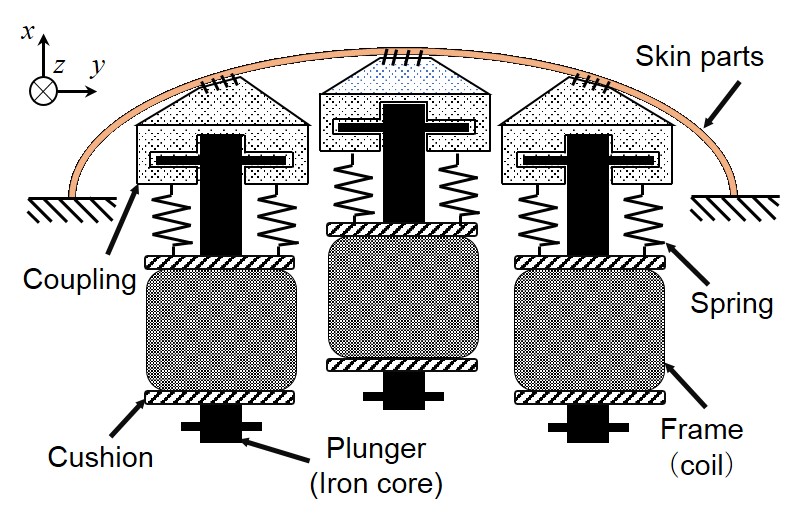
図3 陥没呼吸動作再現機構の模式図
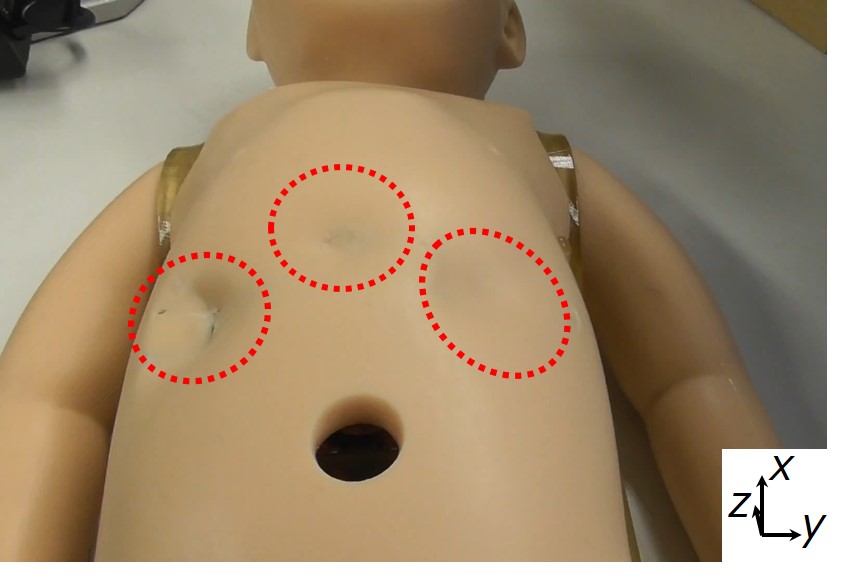
図4 陥没時の腹部の様子(破線内が陥没箇所)
今後は,筋緊張や心拍などのさらなるバイタルサイン模擬機能の追加と,WAKABA-1との機能の統合を進めていきます.
本研究は,国立成育医療研究センター新生児科にご協力頂いております.
関連文献
小川駿也,菅宮友莉奈,武部康隆,今村健人,川崎智佑喜,片山保,中江悠介,高西淳夫,石井裕之:"新生児蘇生法トレーニング・システムの開発―陥没呼吸動作の再現が可能な新生児シミュレータの設計・製作―",第37回日本ロボット学会学術講演会予稿集,3M1-05,2019.
