医学教育 シミュレーション システムの開発
概要
高西研究室では、医療従事者の手技訓練のための患者ロボットの開発に取り組んでいます。効果的な訓練のために患者ロボットには、さまざまな患者の身体的特徴と状態を模擬する機能と、ロボットに施された診察と治療の手技の妥当性を評価する機能が必要だと考えています。これまで、各部位ごとに、これらの機能を備えた患者ロボットの開発を進めてきました。今後は、これらを統合して、全身型患者ロボットの開発に取り組んでいく計画です。
なおこの研究は 株式会社京都科学との共同研究であり、これまでに以下の補助金や助成金を得て実施されてきました。
WKS (Waseda Kyotokagaku Suture) シリーズ
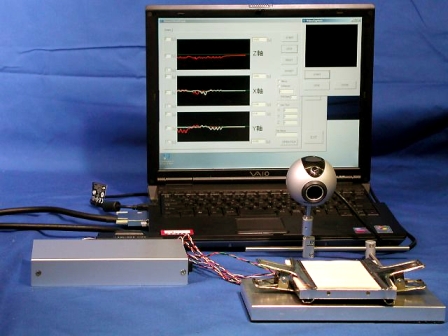
WKS-1
2005-2006
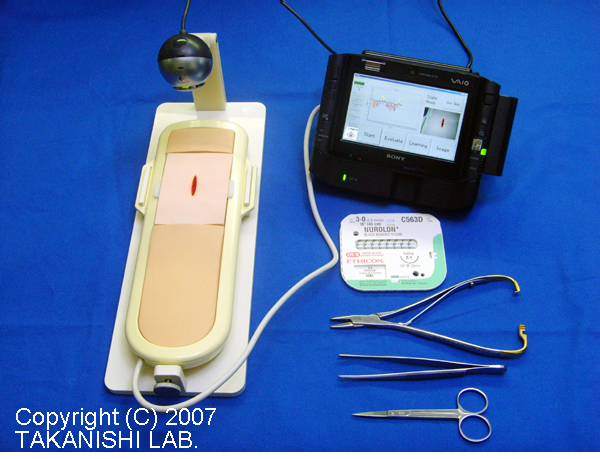
WKS-2R
2006-2007
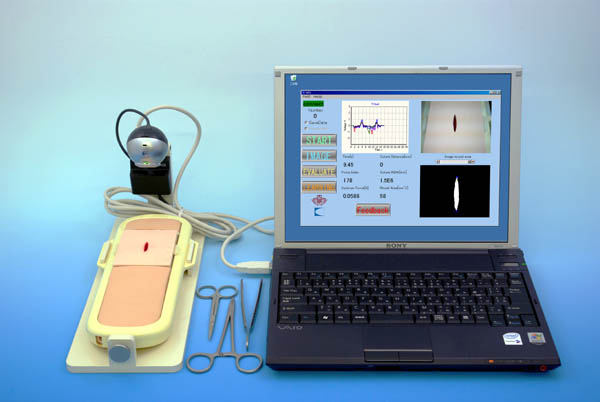
WKS-2RII
2007-2008

縫合手技評価 シミュレータ
2008-2009
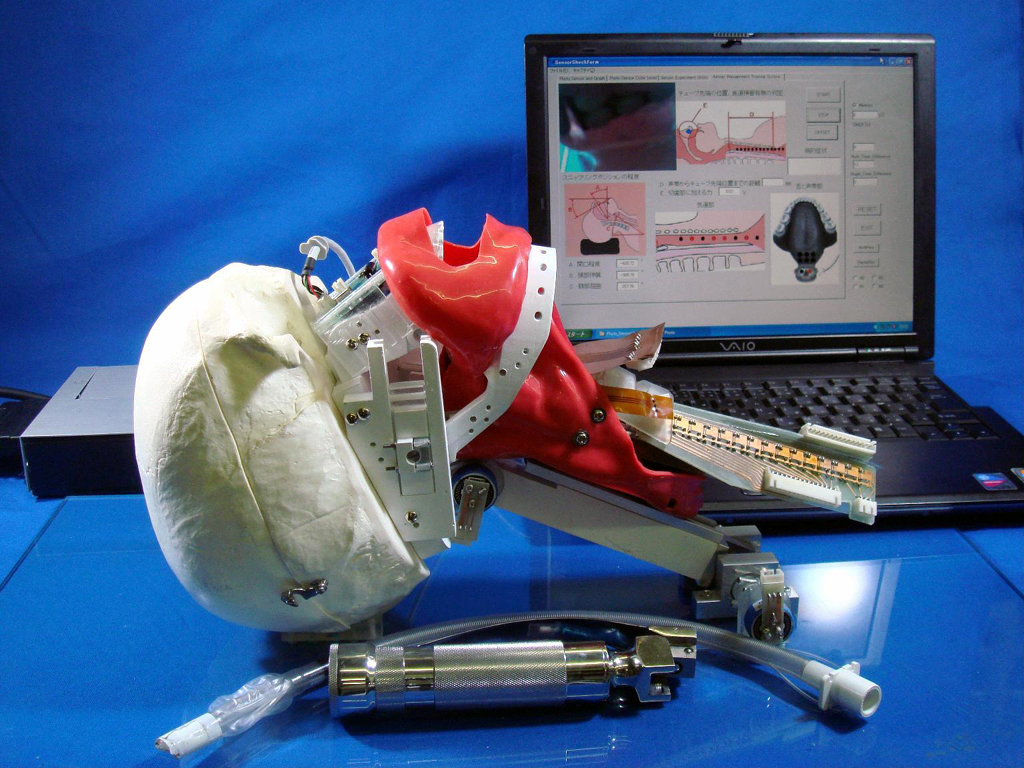
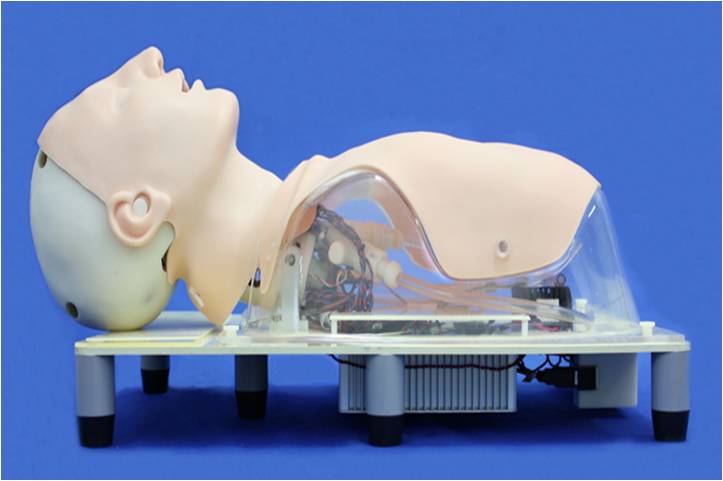
WKA (Waseda Kyotokagaku Airway) シリーズ
WKA-1R
2007-2008
WKA-2
2007-2008
WKA-3
2008-2009
WKA-4
2009-2010

WKA-5
2010-2011
WKA-5R
2011-2012

評価型気道管理 シミュレータ
2012-
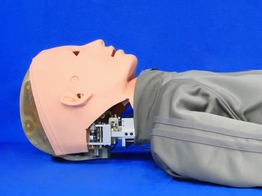
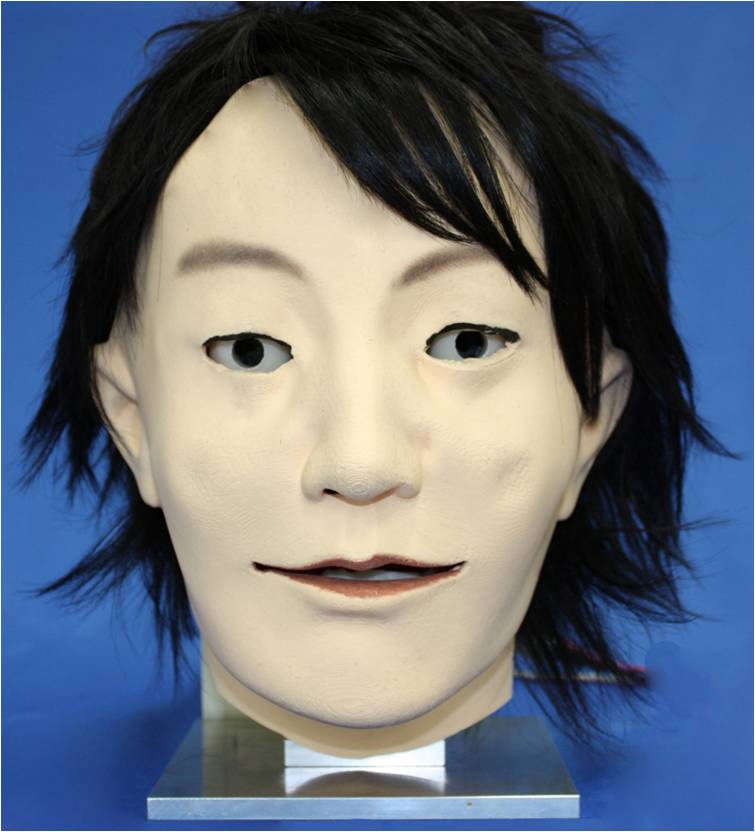
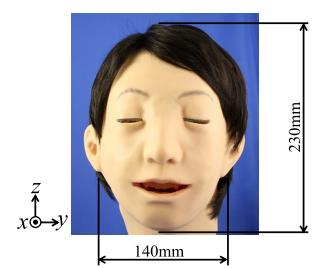
WKH (Waseda Kyotokagaku Head) シリーズ

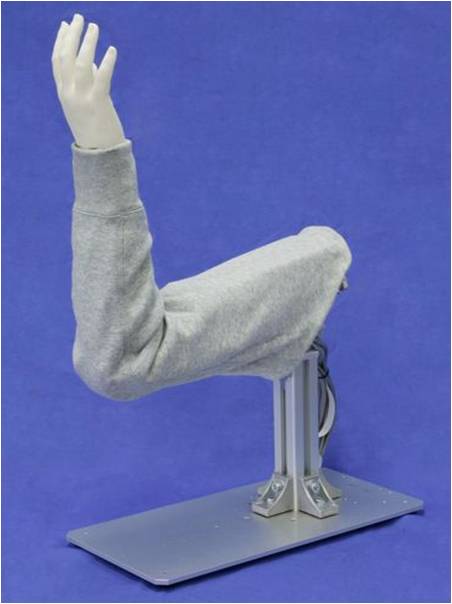
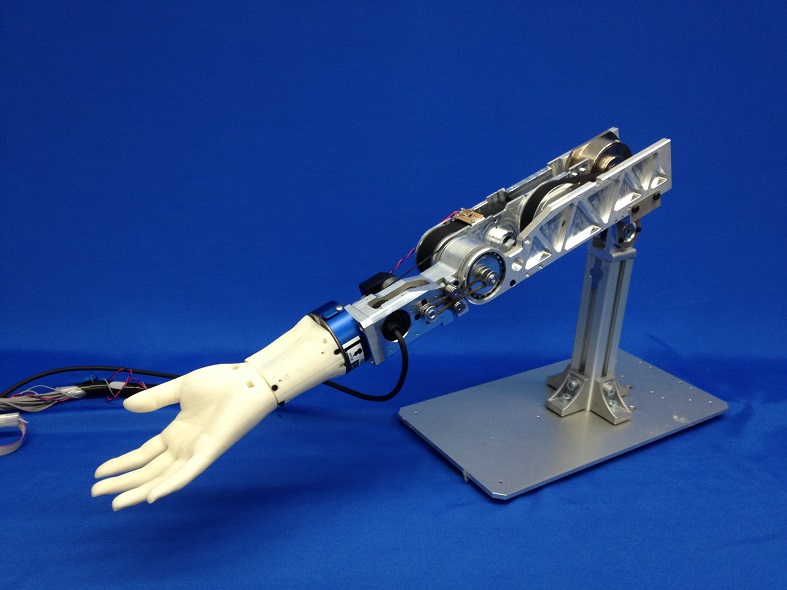
WKE (Waseda Kyotokagaku Elbow) シリーズ
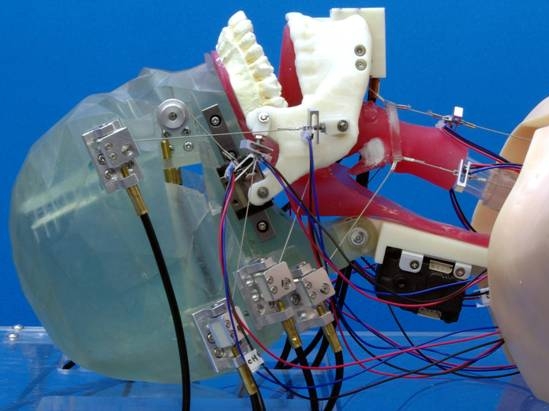
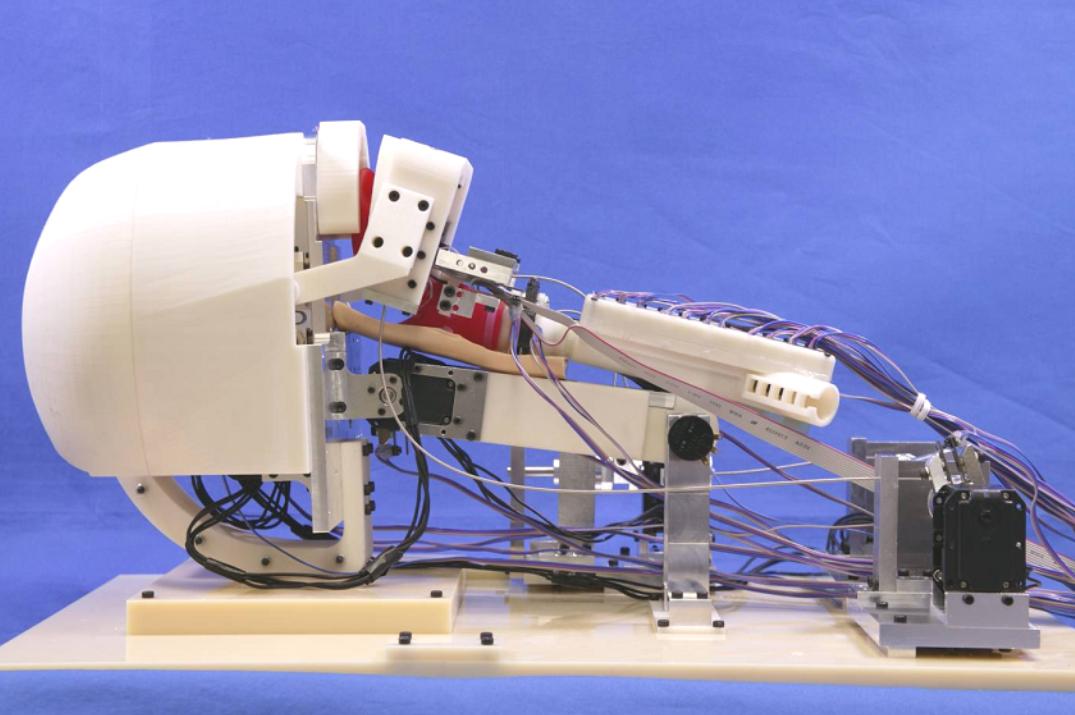
WAKABA (WAseda Kyotokagaku Airway BAby) シリーズ

WAKABA-1
2016-2017

WAKABA-2
2017-2018

WAKABA-3
2018-2019

WAKABA-4
2019-2020

WAKABA-5
2020-2021
各種訓練システム
注射手技 訓練システム
2015-2016

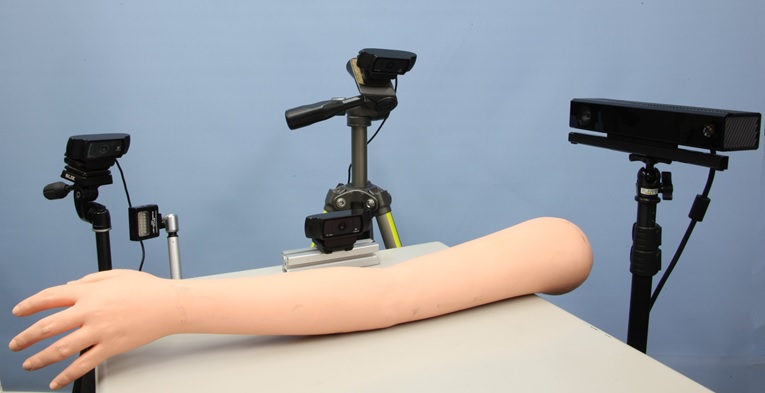
超音波検査手技 訓練システム
2015-2016
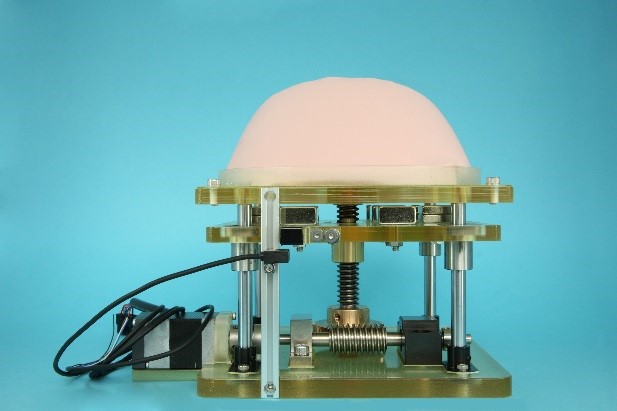
医学教育用触診シミュレータ
2017-2018
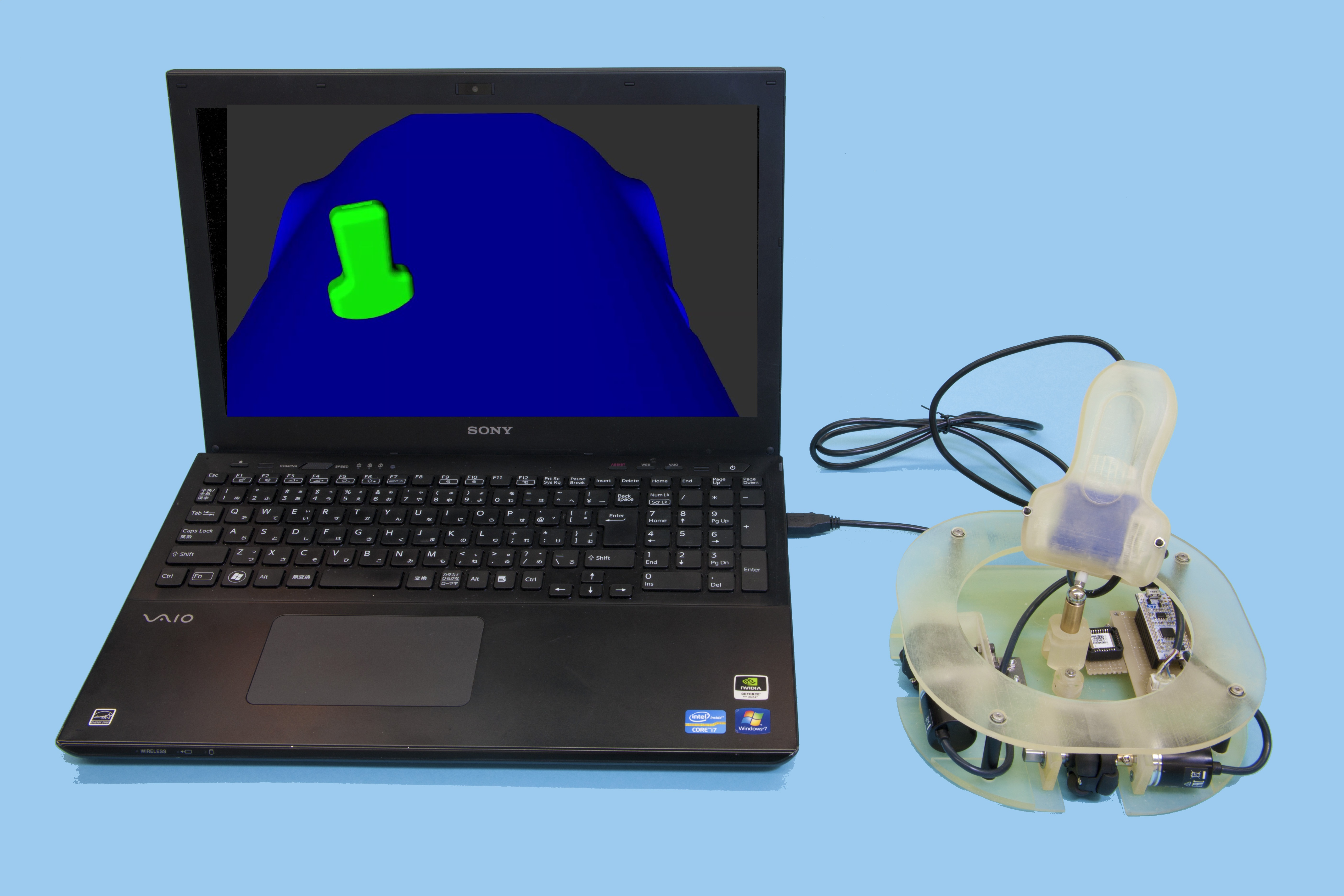
超音波検査訓練シミュレータ
2021-2022
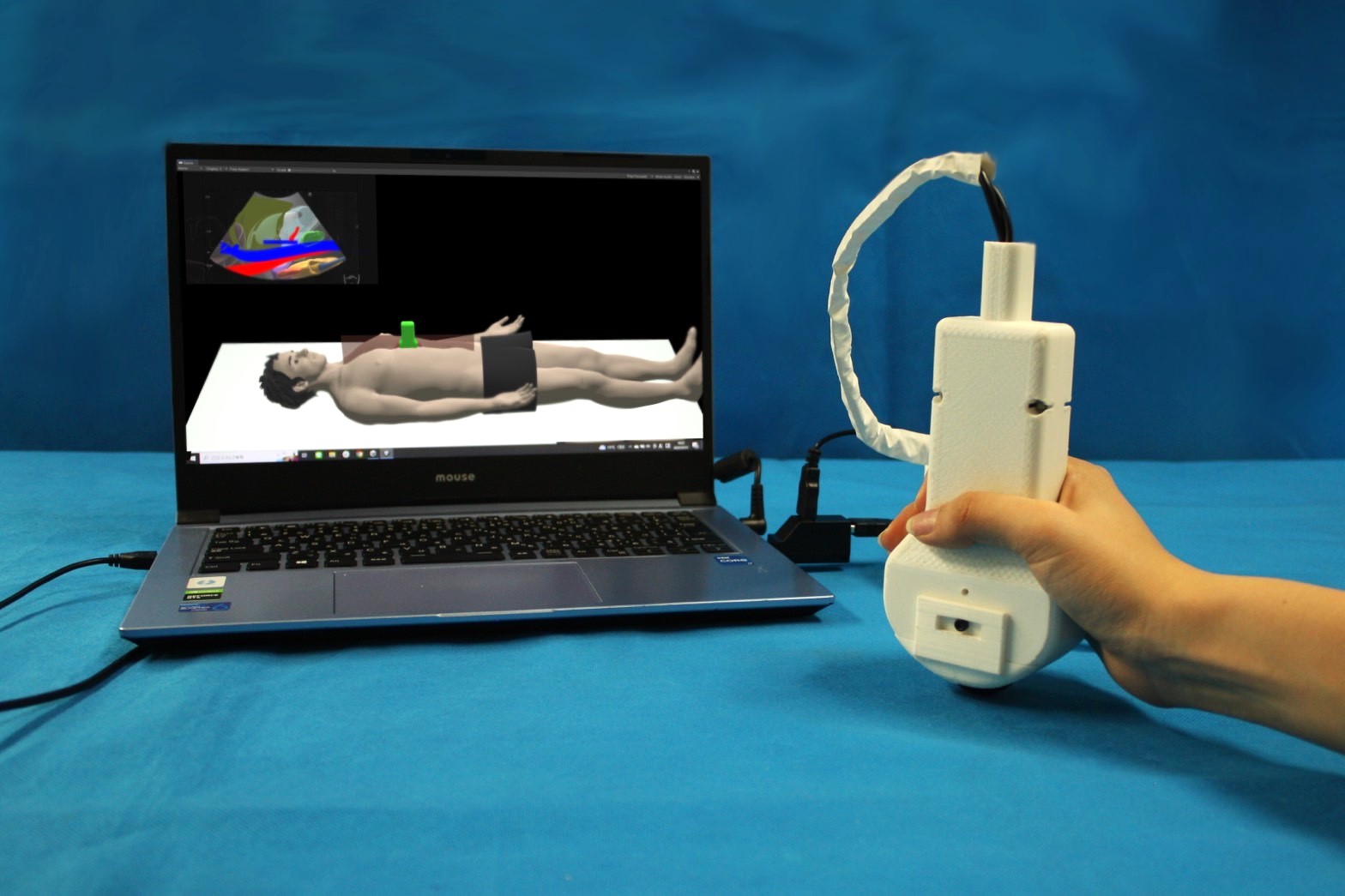
超音波検査訓練シミュレータver2
2022-2023