概要
日本では1年間におよそ100万人の新生児が生まれています.一方で,新生児の16%は出生後すぐに自発呼吸が開始せず,何らかの処置が必要となります.このような場合の対処法として,新生児蘇生法と呼ばれるガイドラインが設けられています.この中には,喉頭展開や気管挿管といった侵襲的な手技が含まれているので,医師には十分な経験が求められます.
しかし,これから訓練が必要な研修医にとって,臨床訓練だけで新生児蘇生法を十分な症例数まで経験することは困難です.シミュレーション訓練も普及しつつありますが,従来のマネキンシミュレータには訓練者へのフィードバック機能がないため,正しい手技を身につけるには不十分です.
これを受けて私たちは,ガイドラインに沿った各種シナリオが再現可能で,手技の定量的評価に基づいた助言提示機能を持つ,新生児蘇生法トレーニング・システムの開発を目的としています.2016年度には,新生児蘇生法の中で特に危険性の高い気管挿管手技に焦点を当て,定量的評価のための各種センサを搭載した新生児気道管理シミュレータWAKABA-1(WAseda Kyotokagaku Airway BAby-No.1)を製作しました.
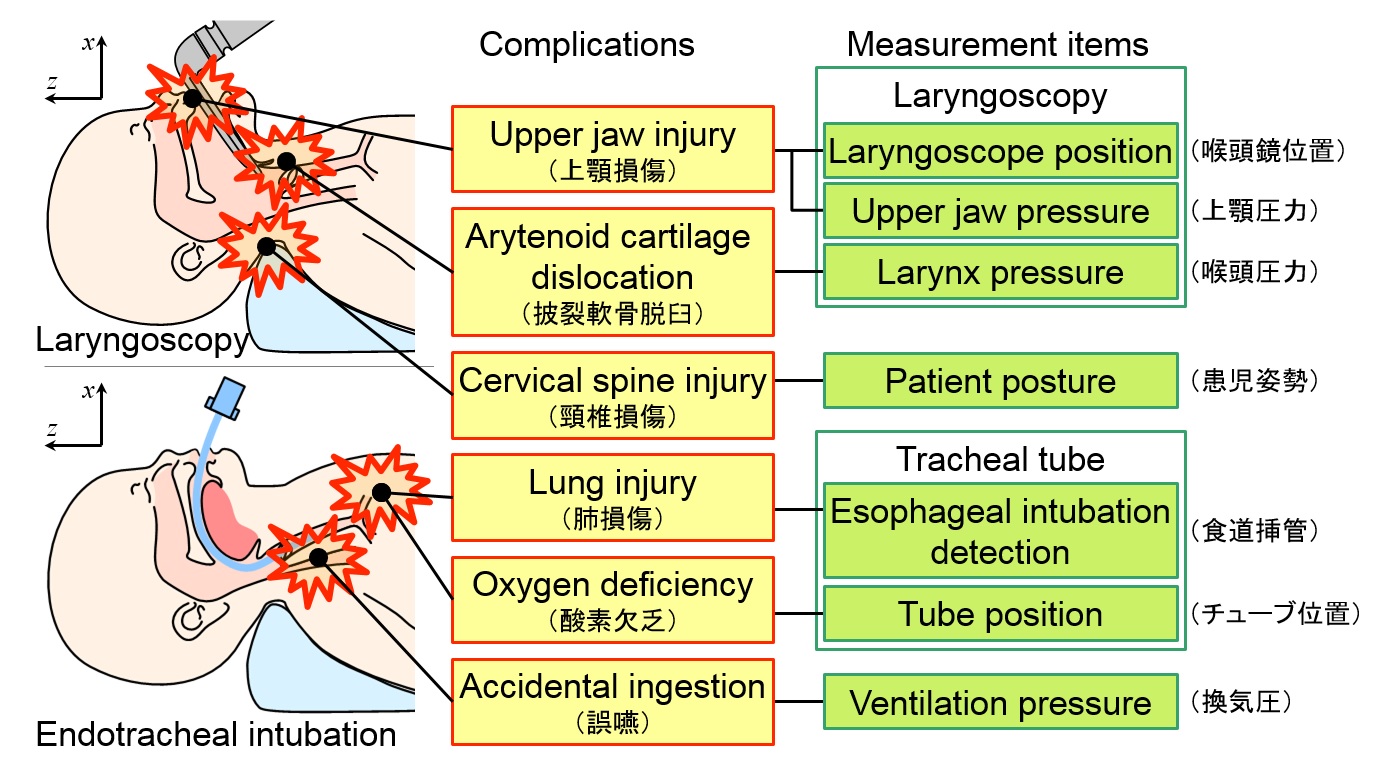
図1 気道管理手技の主な合併症とWAKABA-1の計測項目
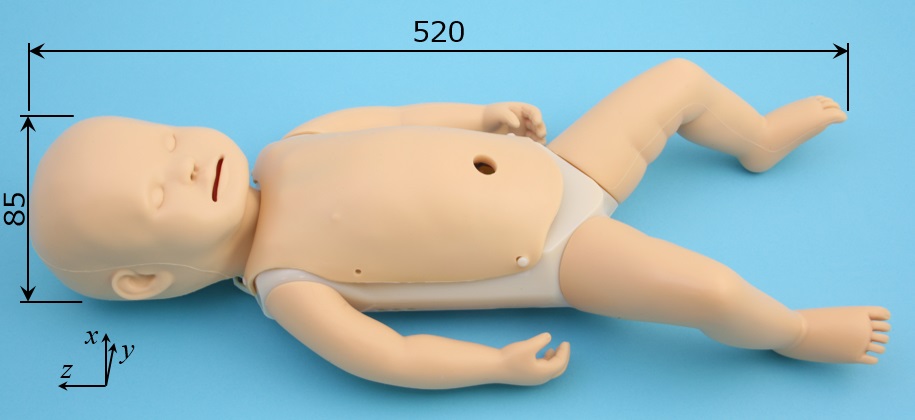
図2 WAKABA-1外観
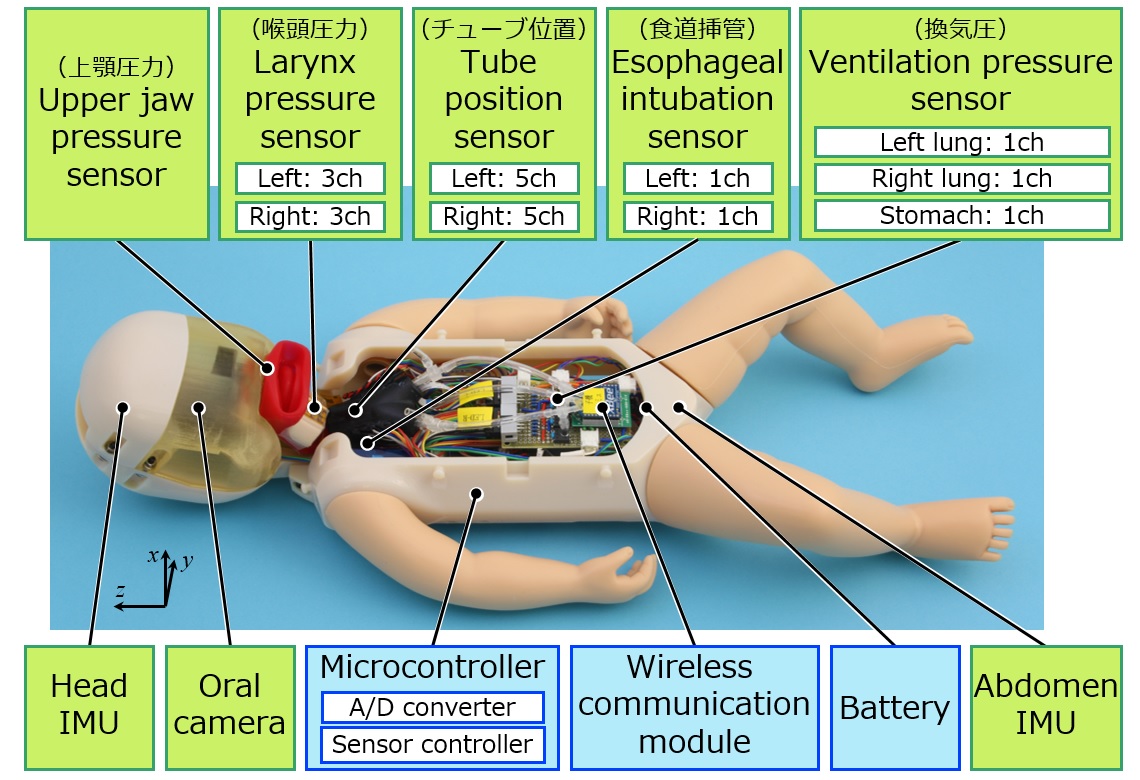
WAKABA-1は新生児の平均的な体格を模擬しており,顔や手足には柔軟素材を用いて新生児に近い外見となっています.また,口から肺までの気道も柔軟素材を用いており,舌や喉頭蓋,食道への分岐なども再現されています.これらの柔軟部品は,共同研究を行なう株式会社京都科学が製作しました.
WAKABA-1には,6種類25個のセンサが内蔵されており,気道管理手技において各種合併症に繋がる危険な操作を検知することができます.センサの計測データは,無線で外部コンピュータに転送されるので,手技の最中や終了後に訓練者へのフィードバックに用いることができます.
本研究では,実際にWAKABA-1を用いて医師の計測を行なっています.熟練医とそれ以外で計測結果を比べたところ,熟練医は喉頭展開に要する時間が短く,上顎・喉頭蓋にかかる圧力も小さいことがわかっています.
今後は,呼吸や心拍といったバイタルサインを模擬する機能を追加し,新生児蘇生法に沿ったシナリオ訓練への対応を進めていきます.また,医師による手技の計測を重ね,新生児蘇生法の定量的な評価方法を検討していきます.そして最終的には,訓練者に対してシミュレータが自動で助言を与える「インタラクティブ・チュートリアル・システム」の構築を目指します.