
概要
日本において,新生児蘇生法(NCPR)は2016年現在で約16万件ほど行われています.また,主に分娩が行われる施設はNICUを含む総合病院,産科診療所,助産所などがあります.そのため,新生児科医だけでなく,産科医・助産師などの看護師も新生児蘇生法の訓練が必要で,その訓練の質を高めることが非常に重要視されています.
NCPRを習得する上で,新生児の状態判断・各手技の知識と技術・迅速かつ適切な手技の選択の3つが重要で,NCPRの一連の流れに応じた訓練が有効であると考えられています.また,総出生数に対する蘇生手技の実施割合は皮膚乾燥と刺激:15%,陽圧換気:5%,気管挿管:2%,胸骨圧迫,薬物投与:0.1%となっている.そのため,珍しい症例は経験が困難であると考えられ,ロボットシミュレータにより再現することでより質の高い訓練を行うことができると考えました.
これを受けて私たちは,ガイドラインに沿った各種シナリオが再現可能で,手技の定量的評価に基づいた助言提示機能を持つ,新生児蘇生法トレーニング・システムの開発を目的としています.2017年度には,新生児蘇生法アルゴリズムの中で最初の分岐点における指標となる呼吸動作のの再現と臨床経験が困難な胸骨圧迫手技の計測を可能にする新生児蘇生法シミュレータWAKABA-2(WAseda Kyotokagaku Airway BAby-No.2)を製作しました.

図1 WAKABA-2外観
機体の内部構造
WAKABA-2はWAKABA-1と同様に新生児の平均的な体格を模擬しており,顔や手足には柔軟素材を用いて新生児に近い外見となっています.また,口から肺までの気道も柔軟素材を用いており,舌や喉頭蓋,食道への分岐なども再現されています.これらの柔軟部品は,共同研究を行なう株式会社京都科学が製作しました.
WAKABA-2は,呼吸動作再現機構と胸骨圧迫手技計測機構が搭載されております.呼吸動作再現機構では,形状記憶合金(以下SMA)と冷却ファンへのPWMの入力時間によって制御しています.胸骨圧迫手技計測機構は新生児を模擬した胸骨と肋骨,およびトーションバネによる反力発生機構と圧迫深さ測定のためのフォトリフレクタで構成されています.上にシステム概要図と呼吸動作再現機構の概略図と制御手法の概要,および胸部の概略図を示します.
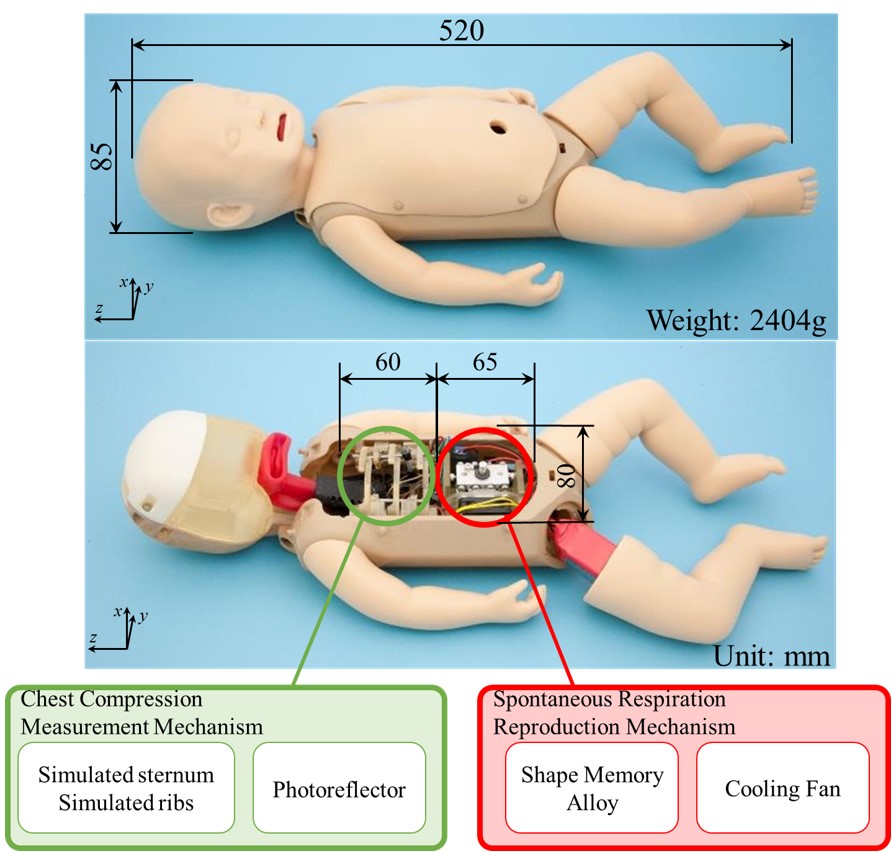
図2 WAKABA-2の外観及び内部機構
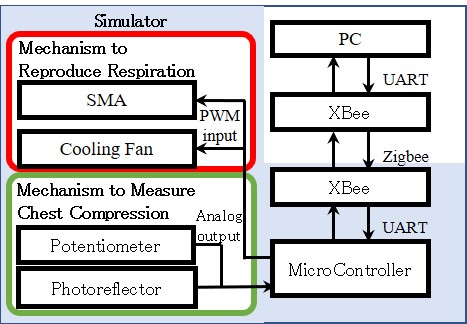
図3 システム概要図
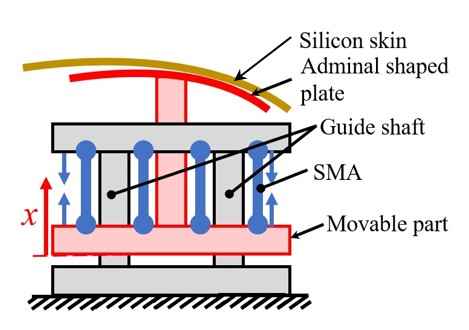
図4 呼吸動作再現機構の概略図
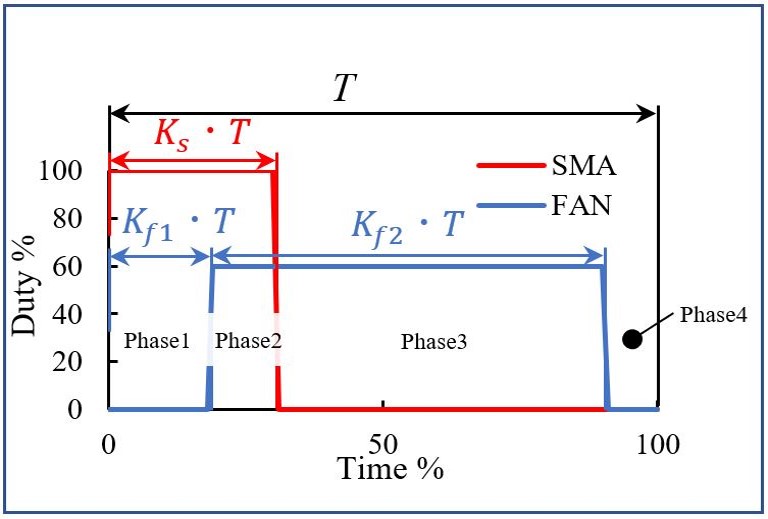
図5 制御手法の概要
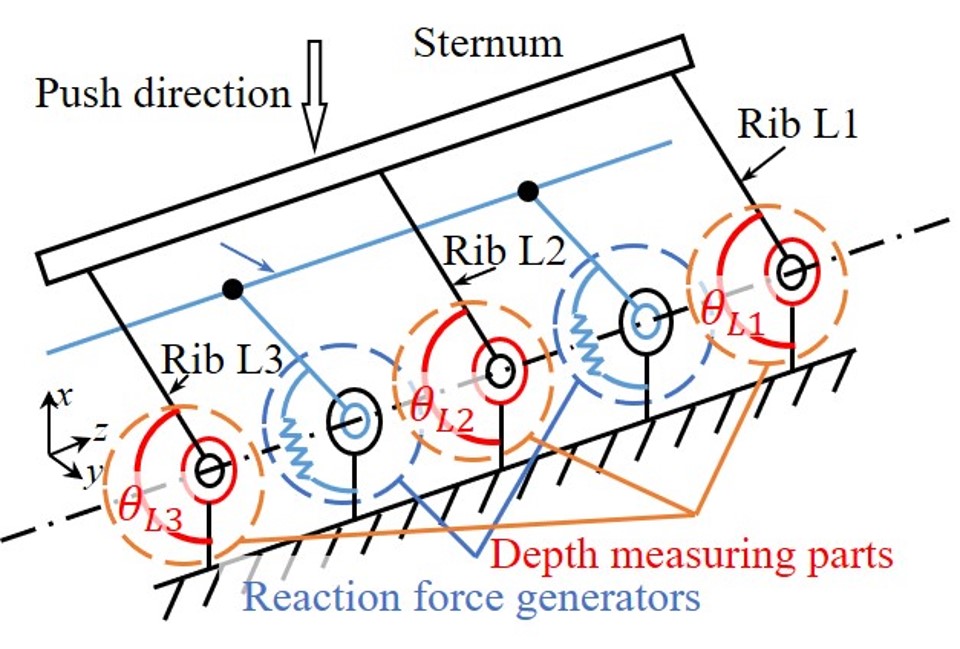
図6 胸部の概略図
今後は,陥没呼吸や心拍などのさらなるバイタルサイン模擬機能の追加とWAKABA-1との機能の統合を進めていきます.