
Abstract
Approximately 160,000 newborn resuscitation laws (NCPR) are being held in Japan as of 2016 in Japan. In addition, there are general hospitals including NICU, obstetric clinics, midwifery facilities, etc., where labor is mainly performed. Therefore, not only neonatologists, nurses such as obstetricians and midwives also need to train neonatal resuscitation methods, and it is very important to raise the quality of their training.
In acquiring NCPR, it is considered that training based on NCPR's sequence is effective, as it is important to judge the condition of the newborn, knowledge of each procedure, selection of technique and quick and appropriate procedure . In addition, the percentage of resuscitation procedures relative to the total number of births is 15% for skin dryness and irritation, 5% for positive pressure ventilation, 2% for tracheal intubation, 0.1% for chest compression and drug administration. Therefore, it is considered that experiences are difficult for unusual cases, and I thought that it would be possible to perform higher quality training by reproducing with a robot simulator.
In response to this, we aim to develop a neonatal resuscitation training system that can reproduce various scenarios in line with the guidelines and have advisory presentation function based on quantitative evaluation of the procedure. In 2017, we manufactured the neonatal resuscitation simulator WAKABA-2 (WAseda Kyotokagaku Airway BAby-No.2), which makes it possible to reproduce the respiration behavior as the index at the first branch point in the neonatal resuscitation algorithm and to measure the chest compression procedure which is difficult to clinically experience.

Fig.1 WAKABA-2
Internal Structure
Like WAKABA-1, WAKABA-2 simulates the average physique of a newborn baby, and its appearance looks like a newborn baby using a flexible material for the face and limbs. In addition, the airway from the mouth to the lung uses flexible materials, and the tongue, epiglottis, branching to the esophagus, etc. are also reproduced. These flexible parts were produced by Kyoto Science Co., Ltd. which conducts joint research.
WAKABA - 2 is equipped with a respiratory motion reproduction mechanism and a chest compression procedure measurement mechanism. In the respiratory motion reproduction mechanism, it is controlled by the shape memory alloy (SMA) and PWM input time to the cooling fan. The chest compressive maneuvering mechanism consists of breastbone and ribs simulating newborn babies, and a reaction force generating mechanism by a torsion spring and a photo reflector for measuring compression depth. A schematic overview of the system outline drawing and breathing motion reproduction mechanism and an outline of the control method and a schematic drawing of the chest are shown above.
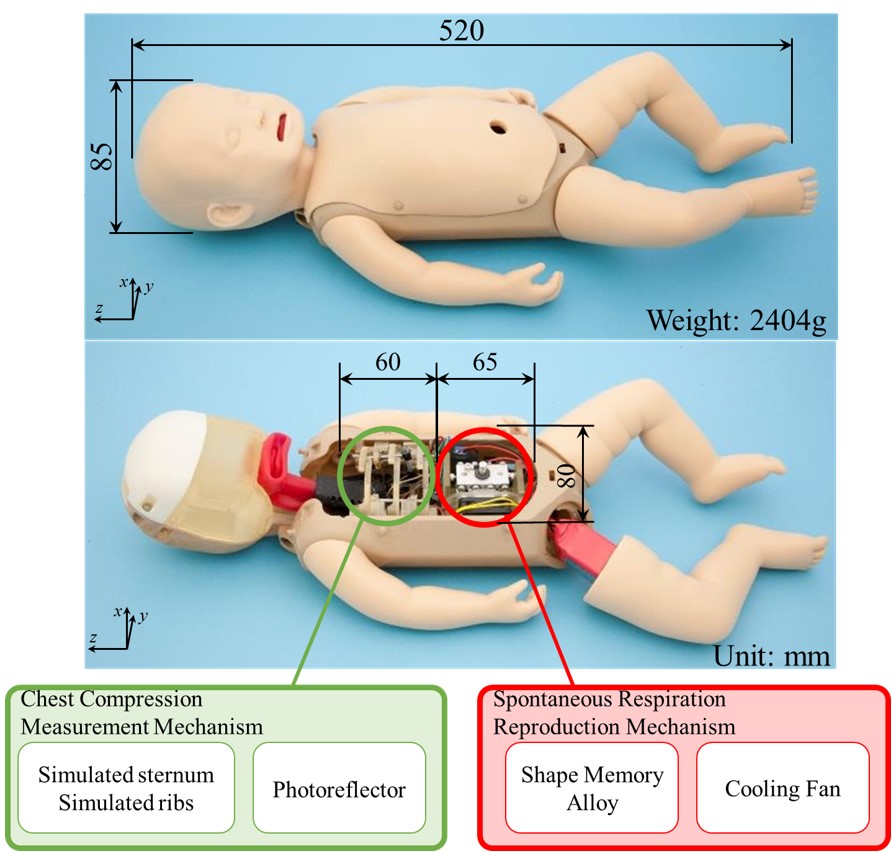
Fig.2 Internal Structure
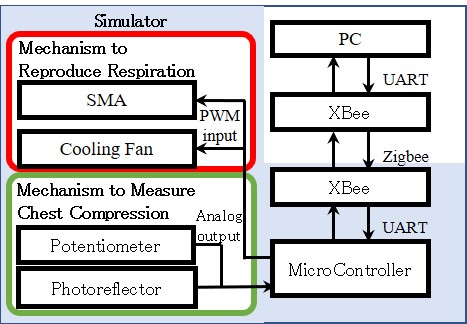
Fig.3 Entire System
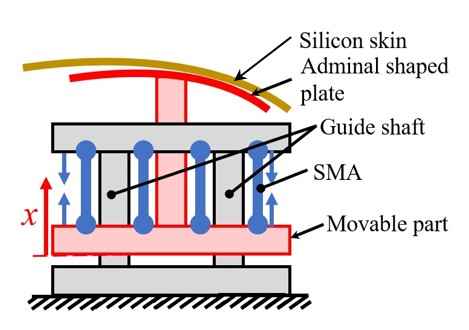
Fig.4 Mechanism to Reproduction Respiration
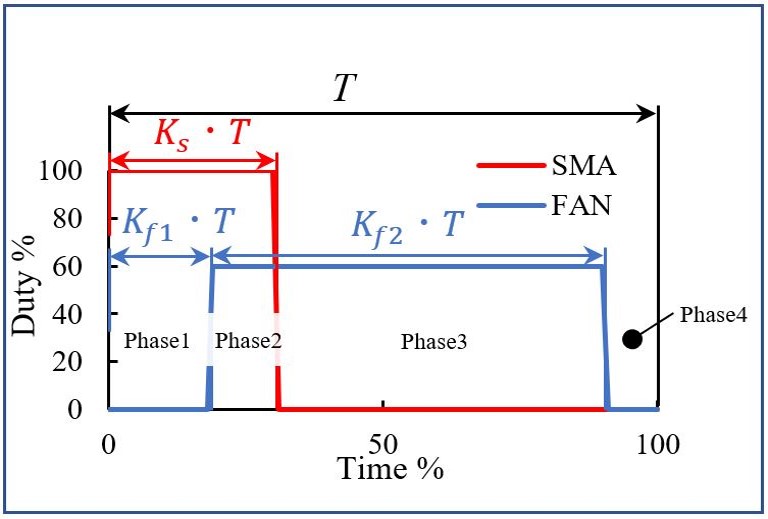
Fig.5 Control Method
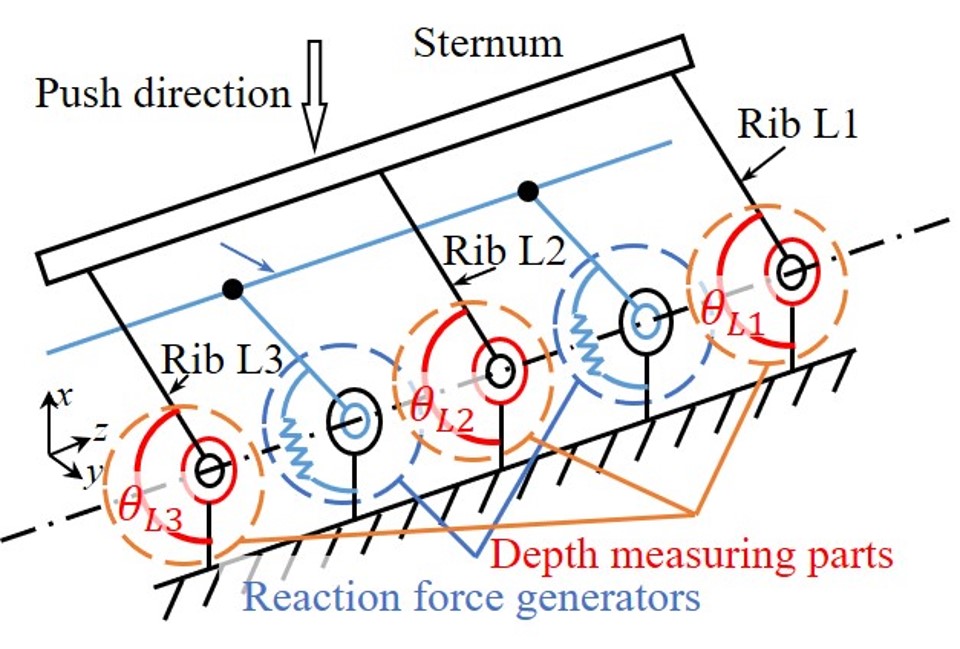
Fig.6 Chest Figure
In the future we will continue to add additional vital signs simulation functions such as depressed respiration and heartbeat and integrate functions with WAKABA-1.