Development of Simulation System for Medical Education
Abstract
Takanishi lab aim to develop a patient robot for medical training. We regard two functions of the patient robot as important for effective trainings: function to simulate the physical features and the scenarios of various patients and function to evaluate the validity of diagnosis and treatment to the robot. We have been developing such patient robots for each region and we are going to develop a whole-body patient robot by integrating them.
This work is a joint research with Kyoto Kagaku Co., Ltd and has been supported by the following subsidies and grants:
Robotic Advanced Medical Cluster in Gifu and Ogaki Region
Innovation Commercialization Venture Support Project of NEDO
The Strategic Core Technology Advancement Program (Supporting Industry Program)
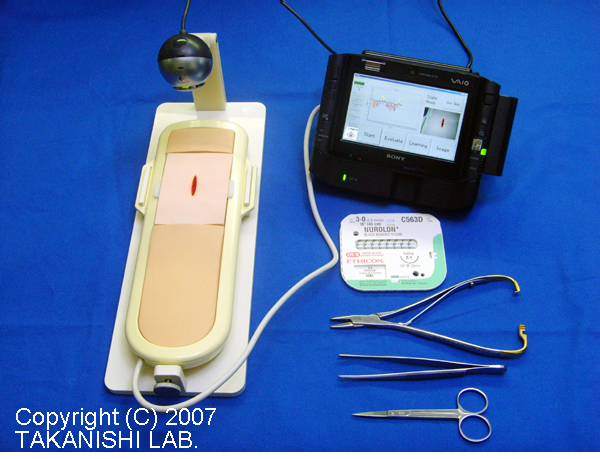
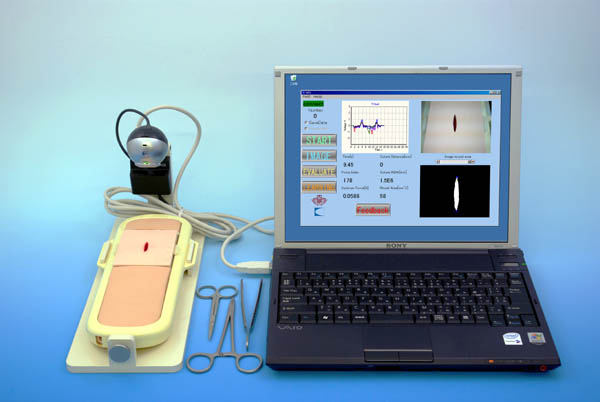
WKS (Waseda Kyotokagaku Suture) series
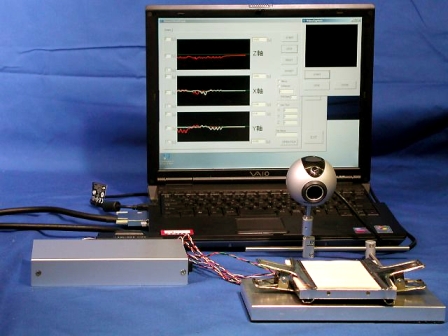
WKS-1
2005-2006
WKS-2R
2006-2007
WKS-2RII
2007-2008

Suture Evaluation Simulator
2008-2009
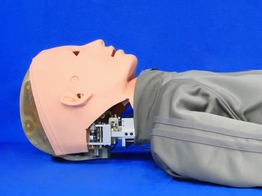
WKA (Waseda Kyotokagaku Airway) series
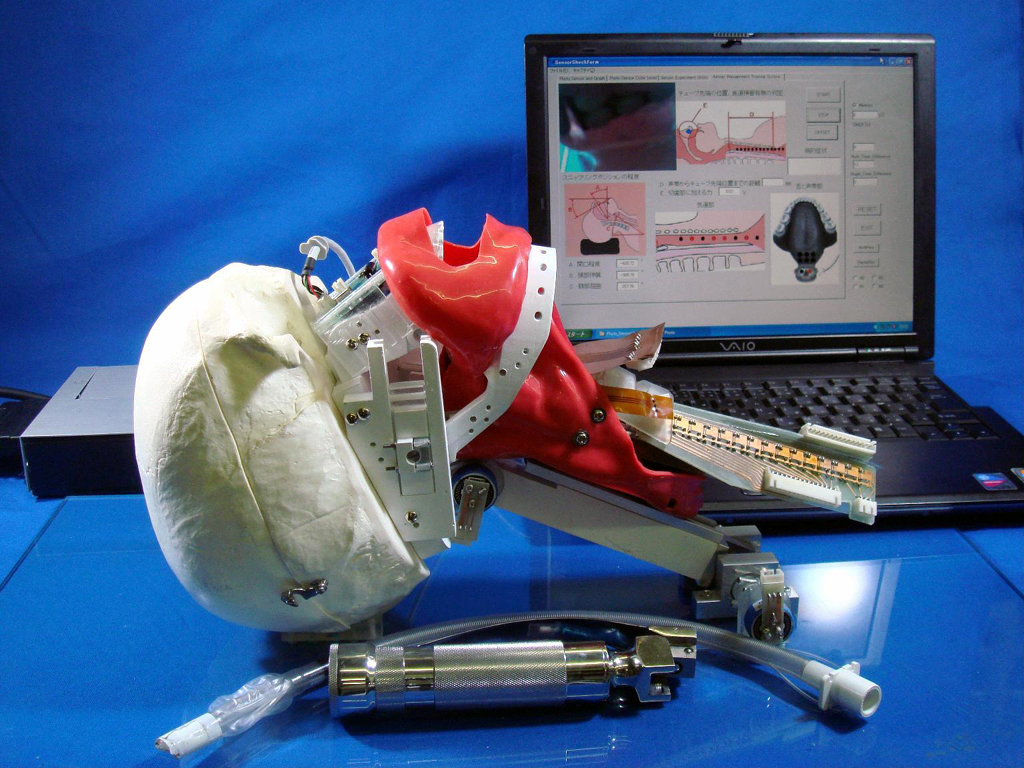
WKA-1R
2007-2008
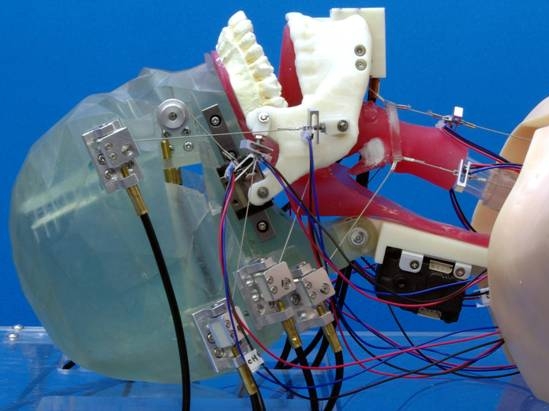
WKA-2
2007-2008
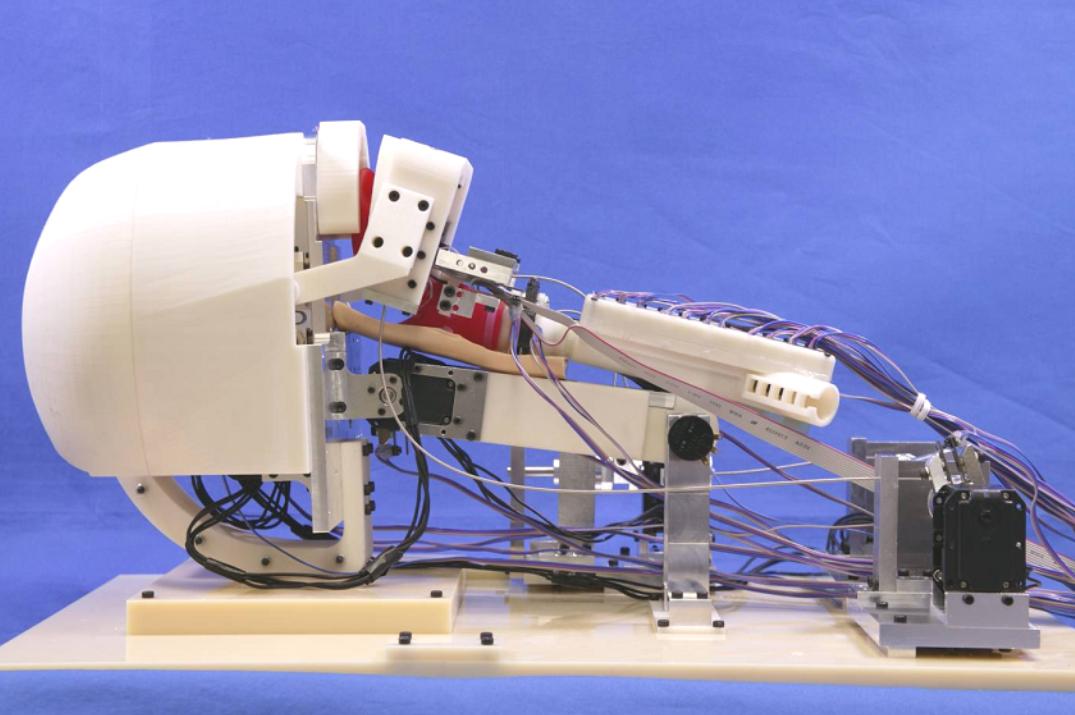
WKA-3
2008-2009
WKA-4
2009-2010

WKA-5
2010-2011
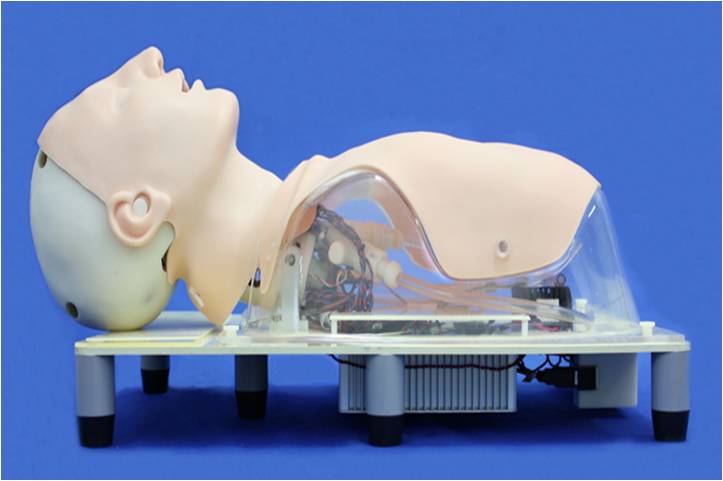
WKA-5R
2011-2012

DAM Simulator Assessment System
2012-
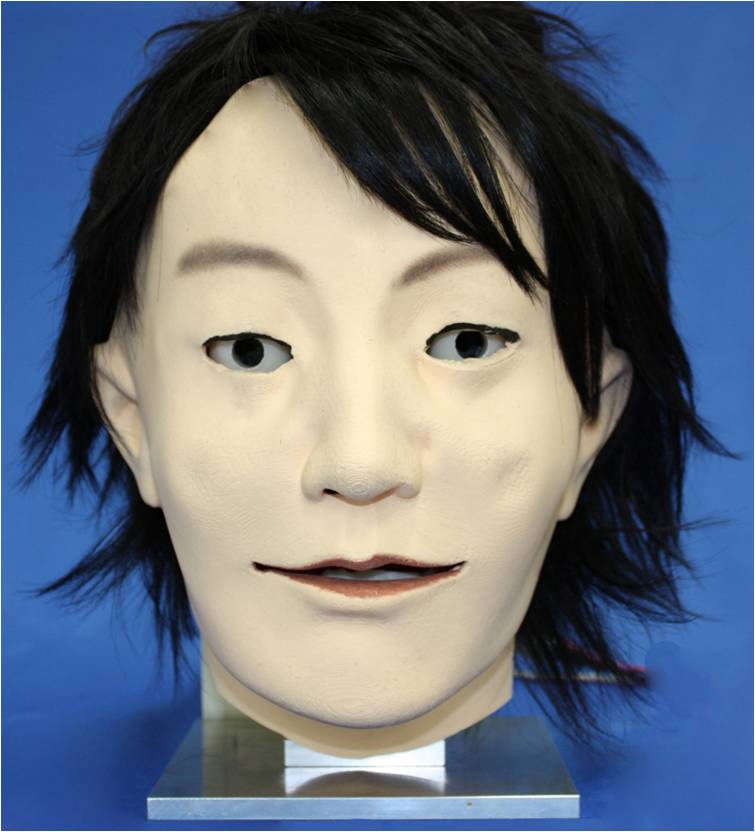
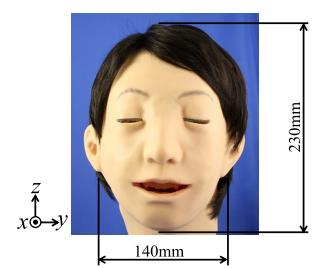
WKH (Waseda Kyotokagaku Head) series

WKE (Waseda Kyotokagaku Elbow) series
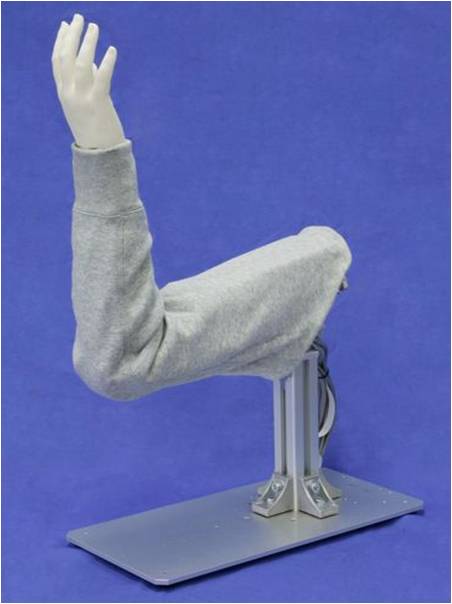
WKE-1
2011-2012
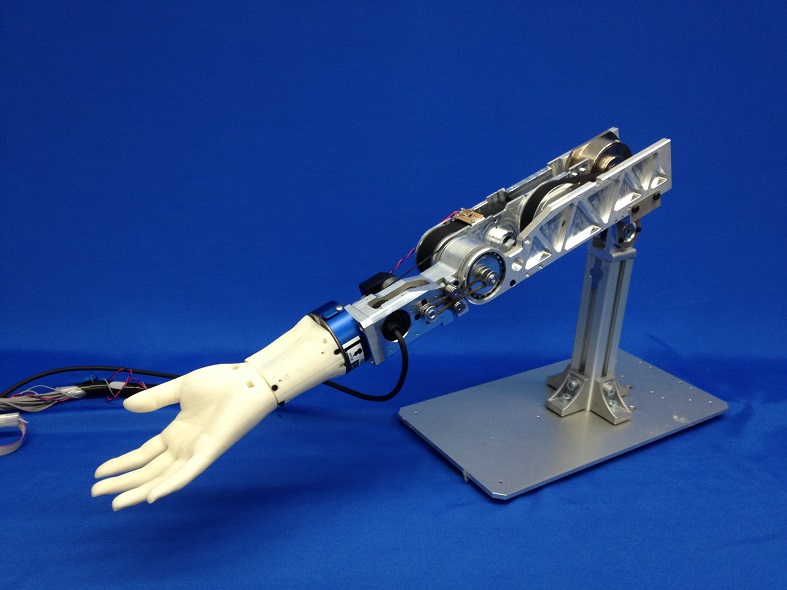
WKE-2
2012-2013
WAKABA (WAseda Kyotokagaku Airway BAby) series

WAKABA-1
2016-2017

WAKABA-2
2017-2018

WAKABA-3
2018-2019

WAKABA-4
2019-2020

WAKABA-5
2020-2021
Training Systems
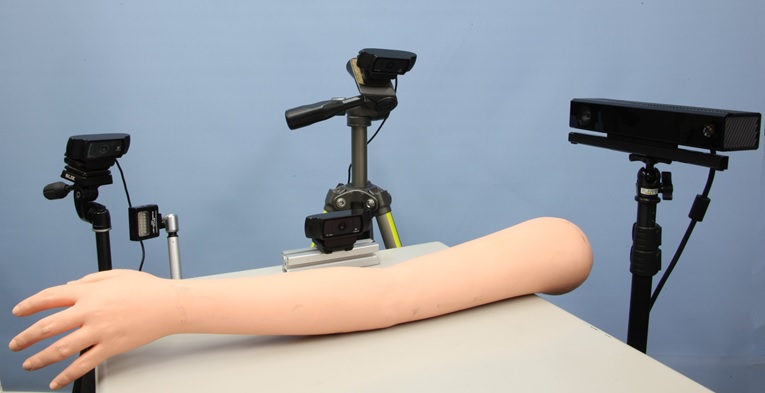
Venipuncture Training System
2015-2016

Ultrasonography Training System
2015-2016
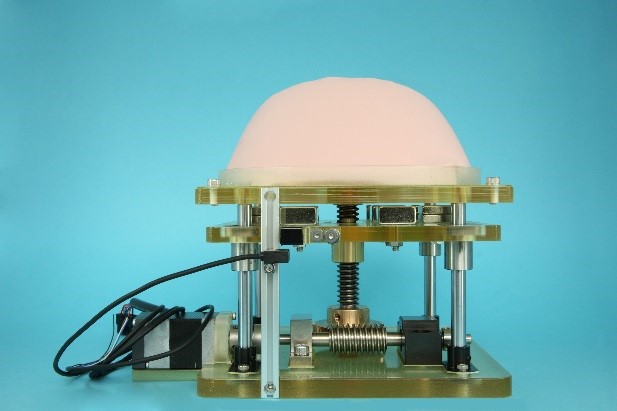
Palpation_Simulator
2017-2018
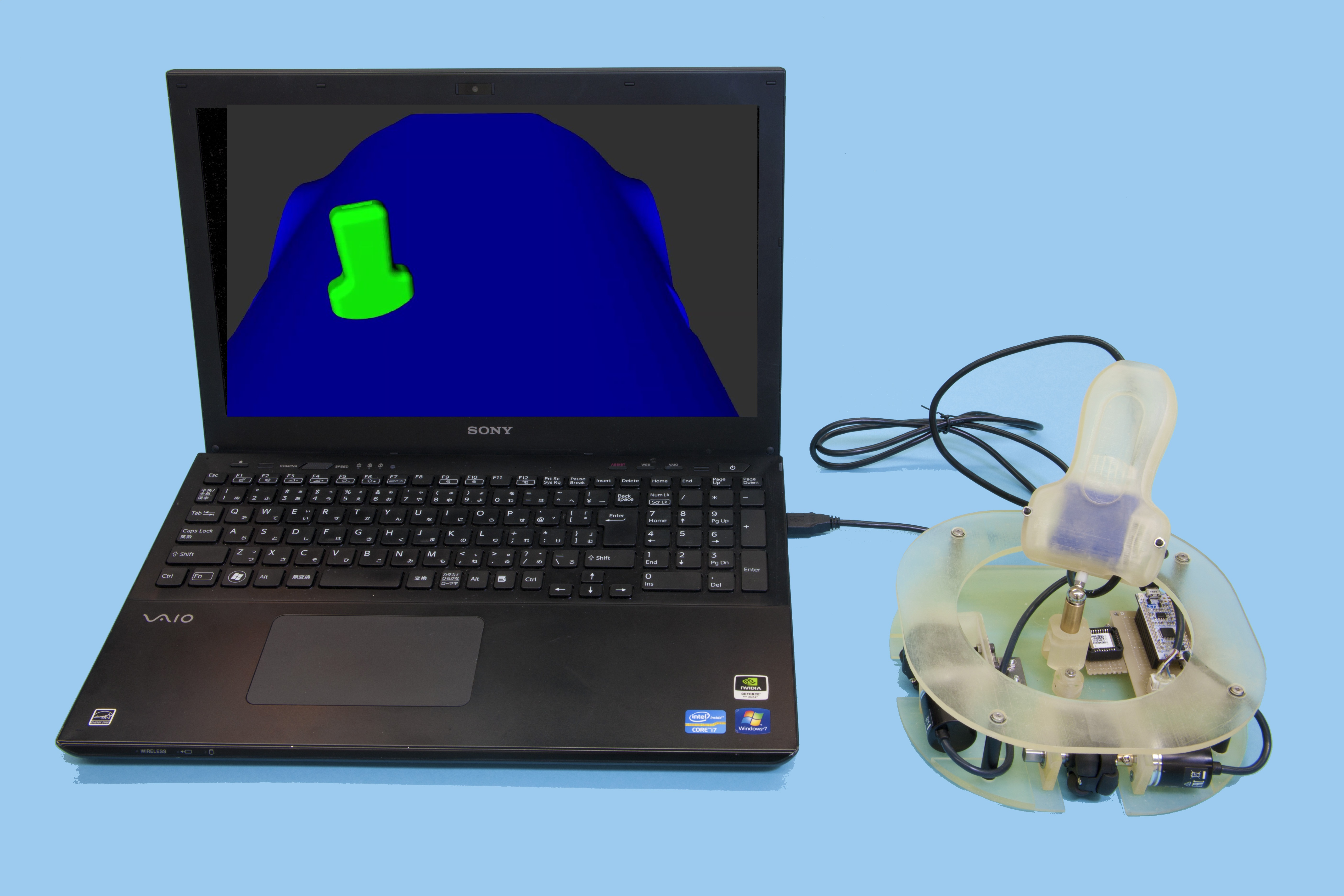
Ultrasonography Training Simulator
2021-2022
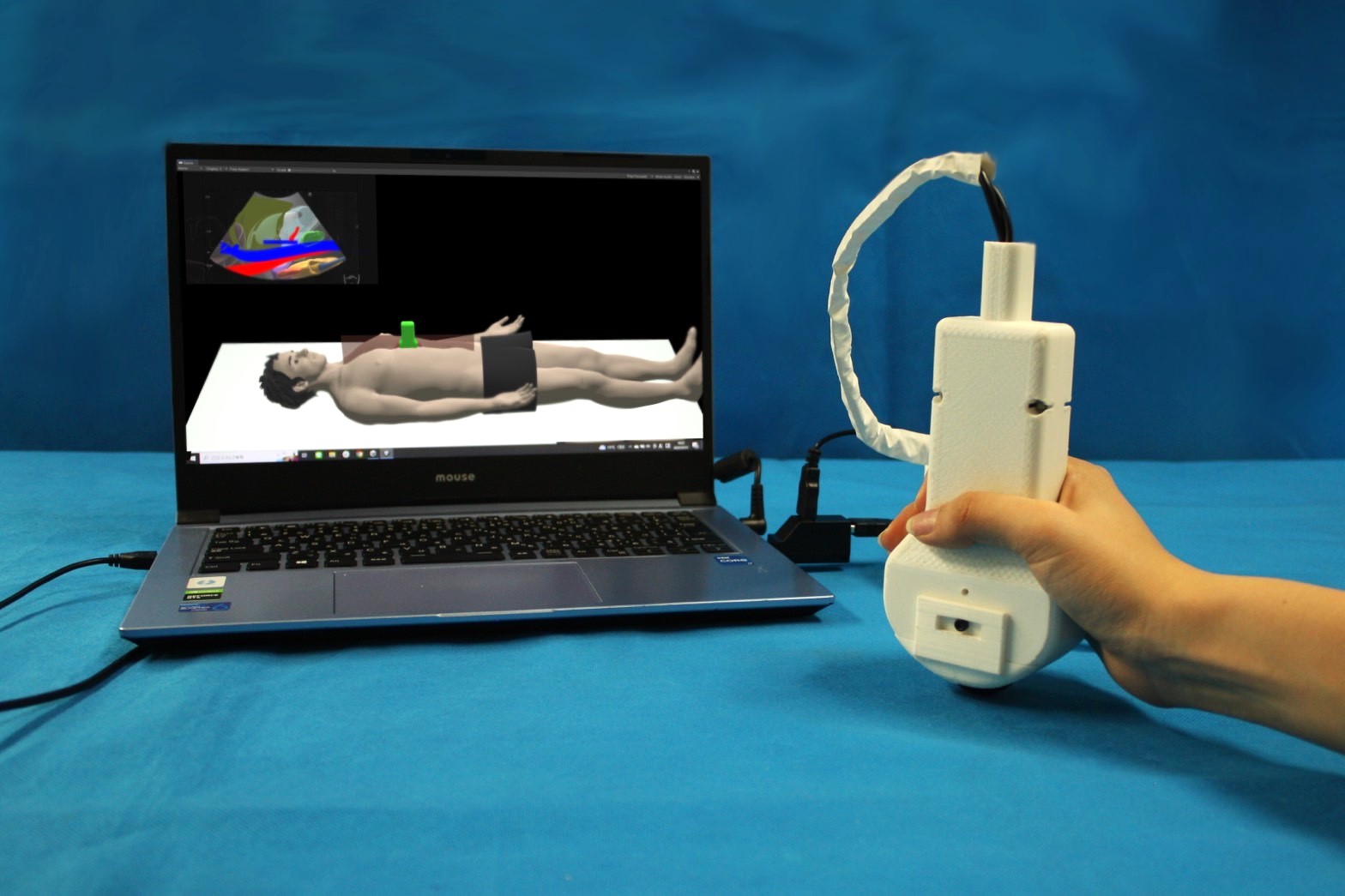
Ultrasonography Training Simulator ver2
2022-2023