Abstract
In recent years, it is said that simulator medical education plays an important role in future medical education because it is an efficient learning by integrating knowledge, skills, attitudes of medical students. In addition, the medical education simulator increases the skill level and fulfills the responsibility to increase the safety for medical training and becomes an item necessary for providing high-quality medical care.
However, in palpation training, simulated patients and mannequin simulators are the main part of training, and there are few models specialized for this training. In addition, there are very few opportunities to palpate genuine diseases before clinical practice, and in many cases, training of palpation is conducted by a person without case, and knowledge of diagnostic criteria and palpation method. However, there are many sensory elements in the reference part, and it is difficult to convey the tactile sensation.
In response to this, we think that enhancement of palpation training and clarification of the criteria will lead to improvement of the medical skills of medical students, and we aimed to develop a palpatory training simulator aiming at achieving that requirement.

Fig.1 Example of medical education by using simulator
Description of the simulator
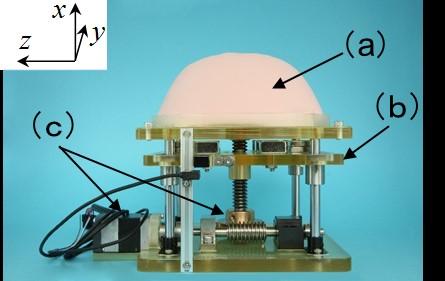
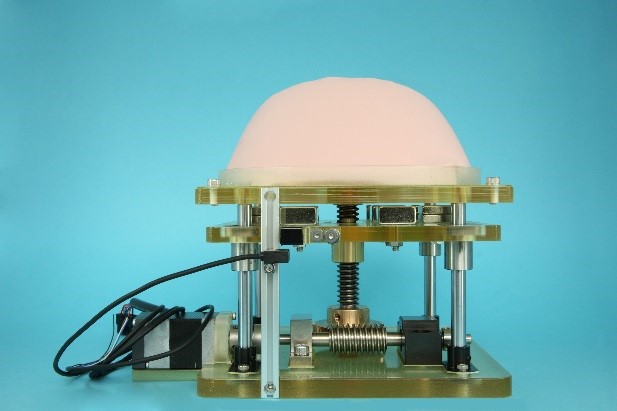
Fig.2 Appearance of palpation simulator
Simulated organ/tumor
As an outline, a tumorous organ is reproduced by embedding a simulated tumor which is an elastic variable mechanism in a simulated organ which is soft tissue. Septon provided by Kyoto Kagaku is used for simulated organs, and elastic variable mechanism is reproduced by using MR fluid.
Explain MR fluid used for simulated tumor. MR fluid is a functional fluid in which magnetic particles are mixed with an oil-based solvent. Magnetic polarization is induced by the application of a magnetic field, and particles are bonded to each other to form particle chains (clusters), and changing the rheological characteristics.
The MR fluid was adopted as the elastic variable mechanism in this simulator, So We consider parameters of its elastic change. (i) type of the magnetic material, (ii) type of the solvent, (iii) the mixing ratio of the magnetic material and the solvent, (iv) magnitude of magnetic flux density. Succeeded to satisfy the elastic change needed by changing these parameters.
Motion mechanism
The magnetic flux density is controlled by moving the center stage (b) where the permanent magnets are arranged up and down by a trapezoidal screw. On the lower stage (c), a motor and transmission parts for driving the trapezoidal screw are installed.
Documents
川崎智佑喜,今村健人,岩城直登,武部康隆,桂亮平,大原隆之,片山保,石井裕之,高西淳夫:"触診訓練用シミュレータの開発 ―MR流体を用いた弾性可変機構を有する触診シミュレータの設計・製作―",第36回日本ロボット学会学術講演会予稿集,2B2-01,2018.