概要
近年,シミュレーション教育は医学生の知識,技能,態度の統合を図り効率的な学習であることから,今後の医学教育において重要な役割を果たすと言われている.また,医学教育シミュレータは技能レベルを高めるとともに,医療訓練に対する安全性を高める責任を果たし,良質な医療を提供するために必要なアイテムとなってくる.
しかし,触診訓練においては模擬患者やマネキンシミュレータが訓練のメインとなっており,この訓練に特化したモデルが少ない現状にある.加えて臨床実習前に本物の疾患を触診する機会は非常に少なく,多くの場合症例の異なる(正常など)人間を触り,診断基準の知識や触診方法を伝えている.ただ,基準となる部分には感覚的要素が多く,触感を伝えるのは困難である.
これを受けて我々は触診訓練の充実とその基準の明確化が医学生の医療手技能力の向上につながると考え,我々はその要求の達成を目指した触診訓練用シミュレータの開発を目指した.

図1 医学教育用シミュレータの例
機体説明
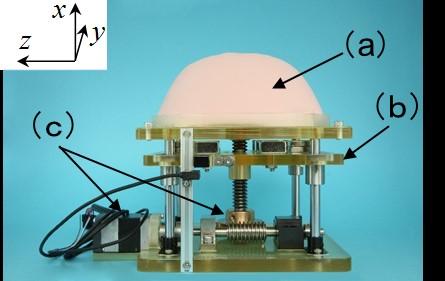
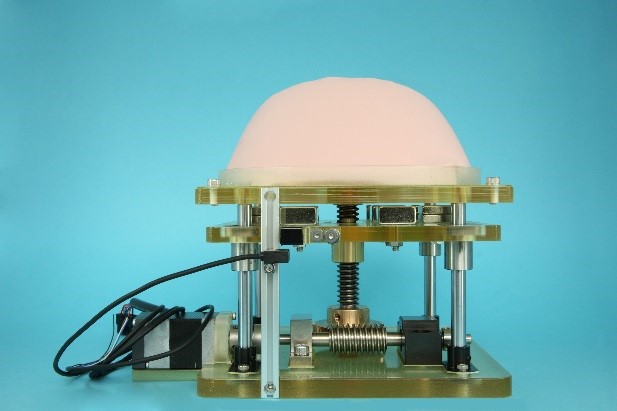
図2 触診シミュレータ 外観
本機体は触診による早期発見の代表例とされる乳房の触診シミュレータを試作した.
模擬臓器・腫瘤
概要としては,軟部組織である模擬臓器に弾性可変機構である模擬腫瘤を埋め込むことで臓器内の腫瘤の発生を再現している.模擬臓器には京都科学より提供されたセプトンを使用し,模擬腫瘤にはMR流体を採用することで硬さ可変を実現している.
MR流体とは磁性体粒子と油系溶媒とが混合された機能性流体のことである.磁場の印加によって磁気分極が起き,粒子同士が結合して粒子鎖(クラスター)を形成することでレオロジー特性が変化する性質を持つ.本機体では弾性可変機構としてMR流体を採用したことから,弾性可変のパラメータとしてを次の4つを挙げた.(i)磁性体の種類、(ii)溶媒の種類、(iii)磁性体と溶媒との混合比、(iv)磁束密度の大きさである.これらのパラメータを変更することで必要とされる弾性変化を満たすことに成功した.
動作機構
永久磁石を配置した中央のステージ(b)を台形ねじによって上下に運動させることで磁束密度を制御している.下部ステージ(c)には,台形ねじを駆動させるためのモータや伝達部品を設置している.
関連文献
川崎智佑喜,今村健人,岩城直登,武部康隆,桂亮平,大原隆之,片山保,石井裕之,高西淳夫:"触診訓練用シミュレータの開発 ―MR流体を用いた弾性可変機構を有する触診シミュレータの設計・製作―",第36回日本ロボット学会学術講演会予稿集,2B2-01,2018.