Abstract
Ultrasonography is used in many clinical fields because it is a noninvasive examination with no risk of radiation exposure and can acquire images of various parts of the body from any angle. Although ultrasonography is difficult to master because it depends on the examiner's ability, the problem is that adequate training is not provided. Ultrasound equipment and phantoms, which are human models used for training, are very expensive, and the time available to students is limited, so training during school is rarely provided.
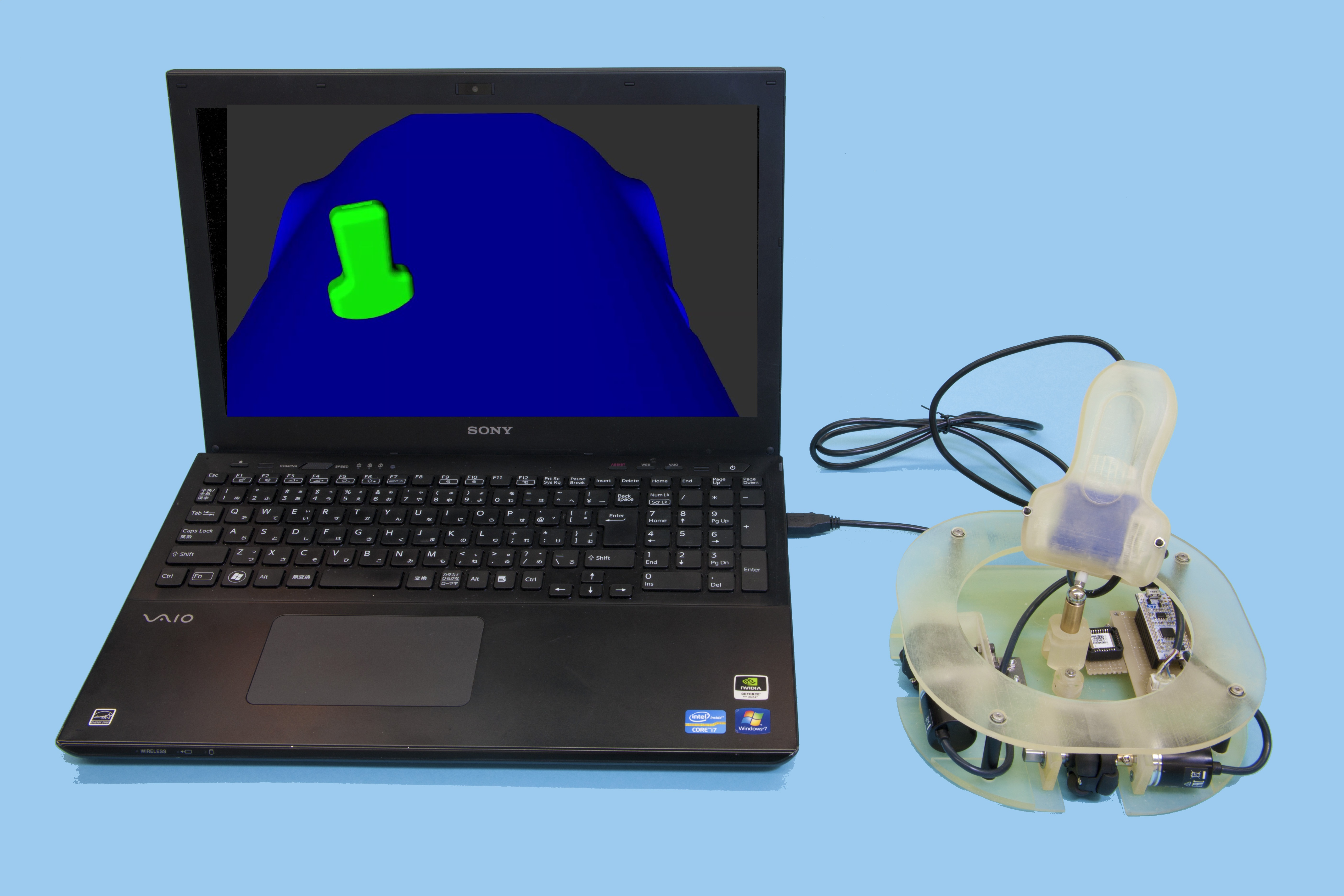
To solve this problem, we are developing a simulator that provides more practical training for ultrasound examinations. In this simulator, a probe-type controller that we have developed is moved by the user, and body markers indicating the examination position are displayed on the monitor screen as the user moves the controller. Ultrasound images corresponding to the positions of the body markers are displayed in real time to reproduce actual ultrasound examinations.