概要
看護において最も基本的な手技のひとつに静脈血採血があります.臨床での実地訓練に代わってシミュレータと呼ばれる模型を用いた訓練方法が普及してきていますが,従来のシミュレータは訓練者へのフィードバック機能がなく技術習得に最も必要な要素が欠けていました.
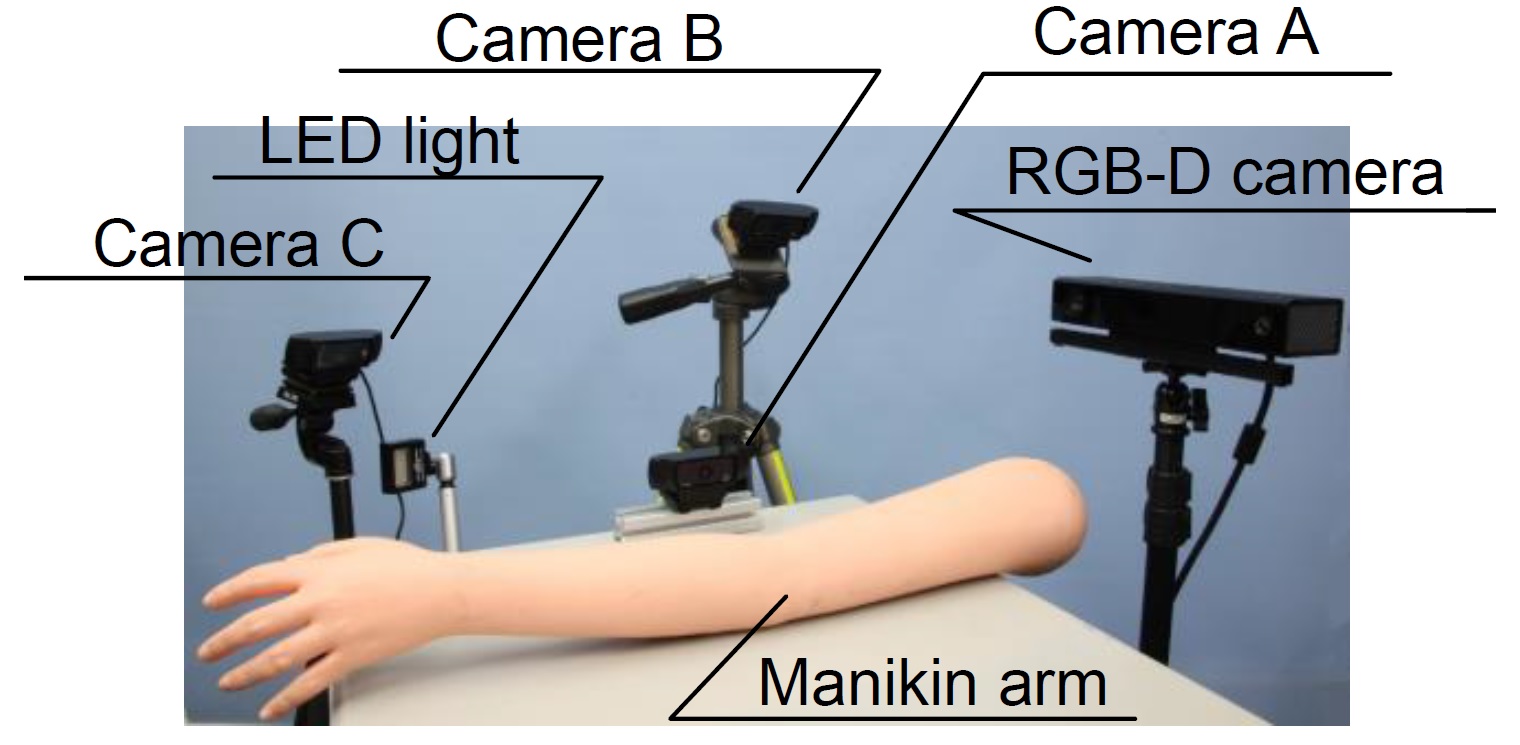
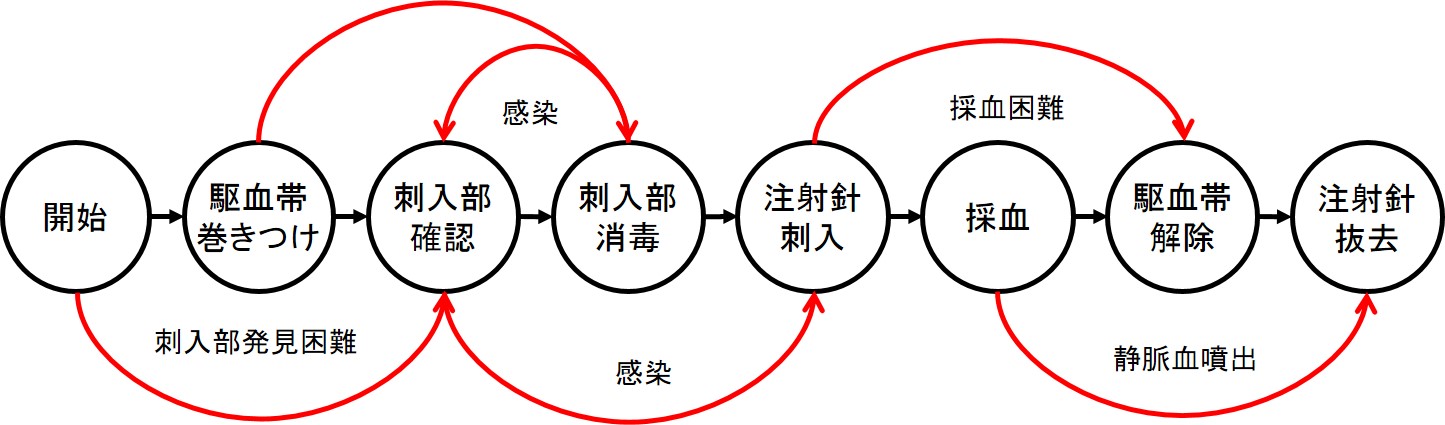
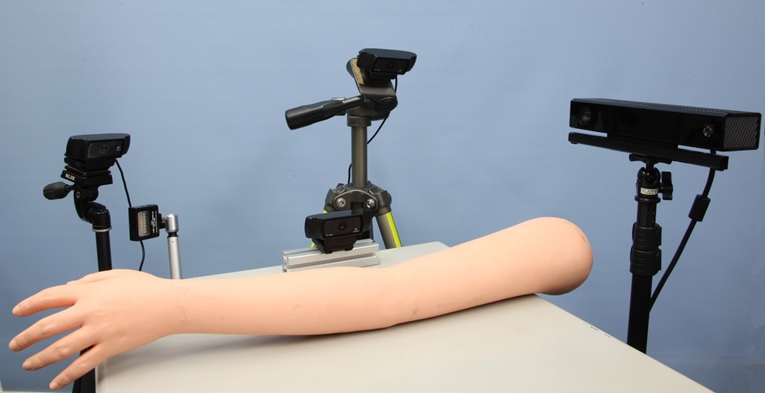
そこで本研究では,手技を自動的に認識し,それにもとづいて助言の提示を行う採血手技シミュレータの開発を目的としています.まず,一般的な静脈血採血の手技として,注射器を用いた肘正皮静脈からの採血手技を対象とした訓練システムを開発しました.本システムは,腕模型とその周囲に配置された3つのカメラ,RGB-Dカメラ(3Dカメラ),ノートパソコンから構成されています.複数のカメラから得られた画像を画像処理することで訓練者に助言を提示することができます.
実験の結果,本シミュレータが助言を提示することで採血手技を正しく習得可能なことが示されました.

図1 従来シミュレータ