 |
 |
 |
|
|
|
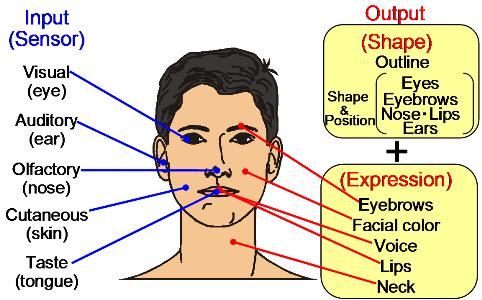 Fig1.Human head |
During human communication, a human distinguishes the partnerüfs individuals by the facial features such as the silhouette, the position and shape of each part, and gauges the mental state based on the facial expressions. Many researchers have developed the robots that can express their emotions using the facial expressions. However, a robot that can change individual facial aspects has not yet been researched. Therefore, we developed a face robot that expresses various faces by changing a shape of the mask and projecting a face image on the face mask. |
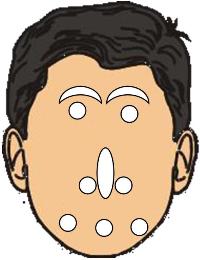
Firstly, we decide the position of the necessary points to express the outline, eyes, nose and so on of a certain person. The robot expresses his/her face by moving all points to the decided positions. |
 |
ü@ |
|
 |
ü@ |
|
| Fig2.Concept of changing face shape | ü@||
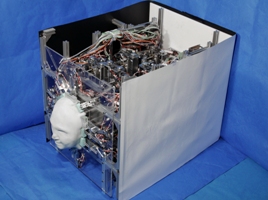
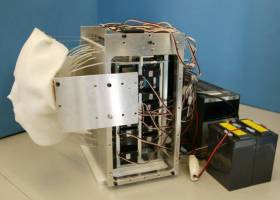 Fig3.WD-0(2003) |
This is the face robot WD-0 deveroped in 2003. The robot change face shape by driving the wire. |
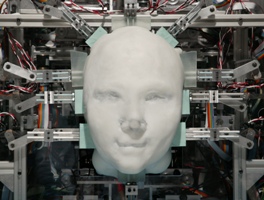
 Fig4.WD-1(2004) |
This is the face robot WD-1 deveroped in 2004. The robot has elastic mask made from avarage head dummy.And driving mask with 3DOF unit,The robot can express more accurate face. |
| The details of the robot |
| Control Point | Connection Parts | Face Mask |
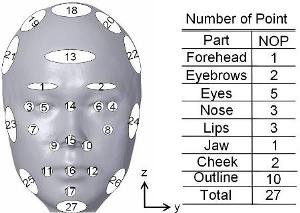 Fig5.Control Point |
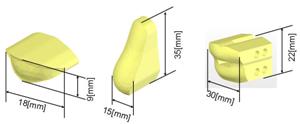 Fig6.Connection Parts |
 Fig7.Face Mask |
| To change the face shape, we decided 27 control points which drived by mechanism like eyes, nose and so on. | Their curved surface is same geometry with the corresponding part of the avarage head dummy(Digital Human Research Center, National Institute of Advanced Industrial Science and Technology) | The face mask is the minimum face of 60 persons. This was made of Septon which is superior in elasticity, rigidity and workability. Steel wool is mixed at a control point to increase in strength |
| 3DOF Drive Unit | Outline Drive Unit | |
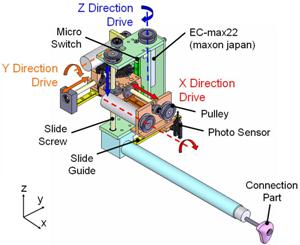 Fig8.3DOF Drive Unit |
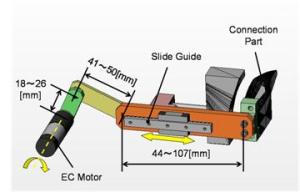 Fig9.Outline Drive Unit |
|
| A shaft is driven to certain direction by a DC motor via a pully and a slide screw. It moves to other two directions in the same way. A connection part set at the tip of the shaft is connected with a control point on the face mask. However, the control points on the middle line are not driven from side to side | ü@An outline drive unit is driven by a slider crank mechanism. The robot changes an outline using 10 outline drive units set around a faceüD | ü@
| A robot general view |
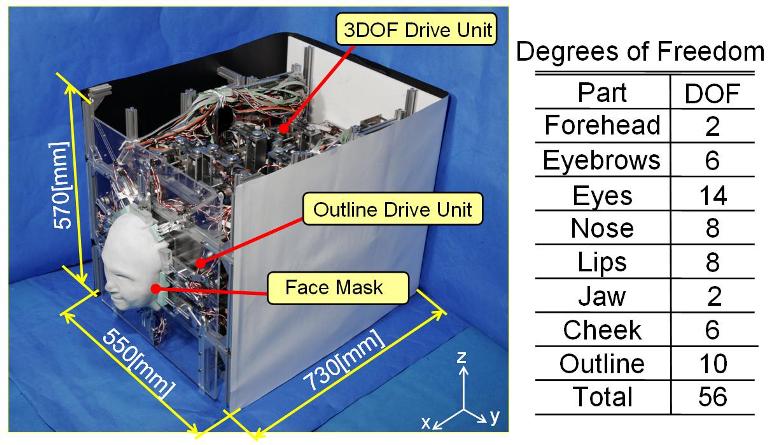
| Fig.10 shows the new face robot WD-2(Waseda-Docomo face robot No.2). 17 control points on the face mask made of the septon, is driven by the 3-DOFs drive units and the outline drive units. The robot has 56-DOFs in total. |
| System Configuration |
The system configuration is shown in Fig.11üDFirstly, the position of the feature points of a person are measured by a 3D scanner. The control points are driven to the measured positions using a notebook computer and 56 motor control boards. The robot can also express the hairstyle and facial color of the person by projecting his/her photo on the face mask which expresses the corresponding face shape.ü@ ü@ |
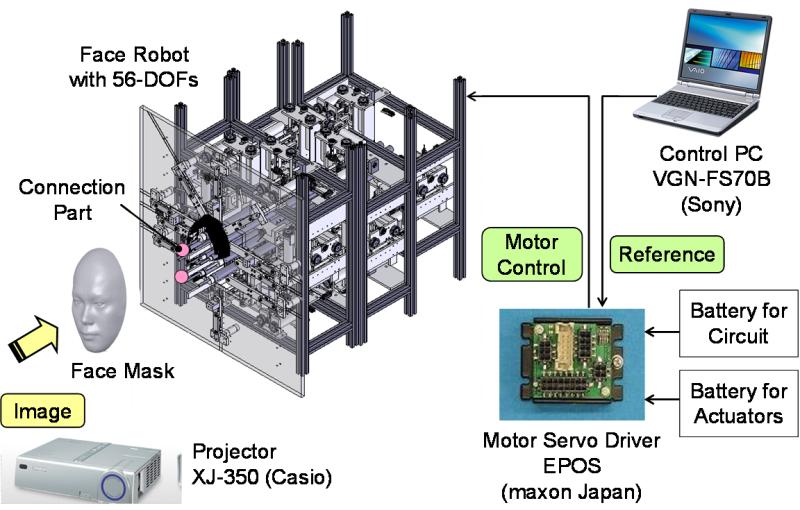 Fig11.System Configuration |
 |
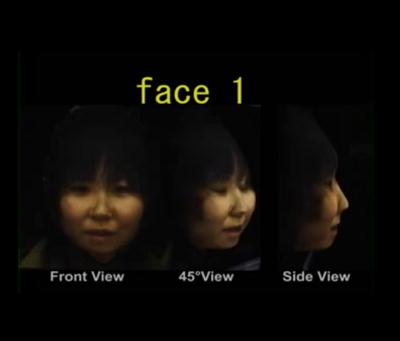 |
| The robot expresses two kind of faces continuously without projection in this movie. | The robot expresses the four faces and the corresponding photo is projected in this movie. Though a photo can not express human presence, the robot can do it. |
We compared the shape of robot which expresses a face with the shape of corresponding human face. Red and blue part show small error and big error, respectively. As a result, we have found that the average error is 3.5[mm]. ü@ |
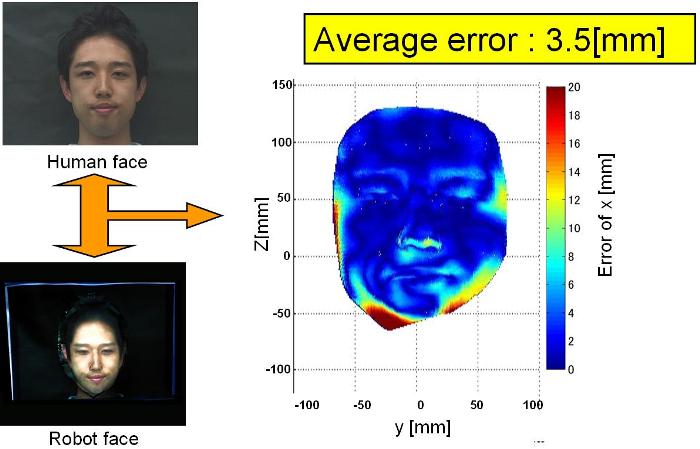 Fig12.Evaluation Result |
| We would like to thank to all researchers , NTT DoCoMo Co,Ltd. Kuraray Co, Ltd. and SolidWorks Japan K. K. for helping us to develop the robot's hardware |