 |
 |
 |
|
|
|
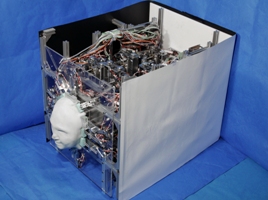
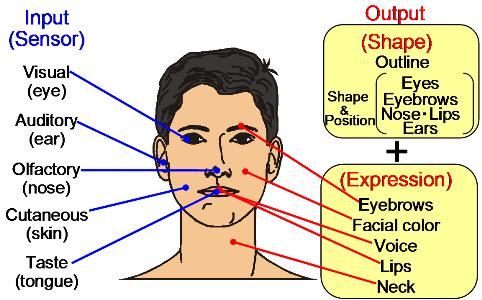 Fig1.恖娫偺摢晹 |
嬤擭丆恖娫偲偺嫟惗傗嫟摨嶌嬈傪栚揑偲偟偨僷乕僜僫儖儘儃僢僩偑搊応偟丆彨棃壠掚傊偺晛媦偑峫偊傜傟傑偡丏偦偺傛偆側儘儃僢僩偵偼丆変乆恖娫偲僐儈儏僯働乕僔儑儞傪偲傞婡擻偑昁梫偵側偭偰偔傞偲峫偊傜傟傑偡丏 偱偼丆恖娫偑偳偺傛偆偵僐儈儏僯働乕僔儑儞傪偲偭偰偄傞偐偵偮偄偰偱偡偑丆僐儈儏僯働乕僔儑儞偵偍偄偰廳梫側傕偺偲偟偰丆傑偢婄偑偁偘傜傟傞偲巚偄傑偡丏 恖娫偺摢晹偵偼帇妎丒挳妎丒怗妎丒歬妎丒枴妎偲偄偆屲姶偺偡傋偰偑懚嵼偟偰偍傝丆奜晹娐嫬偵懳偟偰偡偖傟偨擖椡婡擻傪桳偟偰偄傑偡丏 傑偨丆恖娫偺婄偵偼丆妟偑戝偒偄丆娽偑棧傟偰偄傞側偳丆椫妔傗娽丒旲丒岥摍偺宍忬丒攝抲偵摿挜偑偁傝丆偦偺堎側偭偨峔憿傪偟偨婄柺偺偆偊偱丆昞忣傪昞弌偟偰偄傑偡丏 偮傑傝丆恖娫偺婄偵偼乽婄偺宍忬乿偲乽婄偺昞忣乿偺2偮偺弌椡婡擻偑偁傝丆乽婄偺宍忬乿偵傛偭偰屄恖偺摿掕丆乽昞忣乿偵傛偭偰怱棟忬懺偺摿掕偑偍偙側傢傟丆偦偙偱弶傔偰屄恖偺婄偑昞尰偝傟偰偍傝傑偡丏 偦偙偱杮尋媶偱偼丆1戜偱懡條側婄偺摿挜検傪昞弌壜擻側儘儃僢僩傪奐敪偡傞偙偲偑偱偒傟偽丆儘儃僢僩偺奜娤帺恎偵屄惈傪帩偨偣傞偙偲偑偱偒傞偺偱偼側偄偐丆傑偨偦偺婡擻偲忣摦昞弌婡擻傪慻傒崌傢偣傞偙偲偱丆廬棃偺儘儃僢僩傛傝傕崅搙側僐儈儏僯働乕僔儑儞擻椡偑幚尰偱偒傞偺偱偼側偄偐丏傑偨丆尰嵼偺揹榖傗丆俀師尦夋憸側偳偱偼昞尰偱偒側偄懚嵼姶傪傕揱偊傞偙偲偑偱偒傞偺偱偼側偄偐偲峫偊丆 屄恖偺摿挜検傪昞弌壜擻側婄儘儃僢僩偺奐敪傪栚揑偲偟偰偍傝傑偡. |
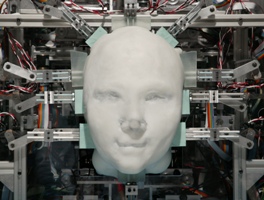
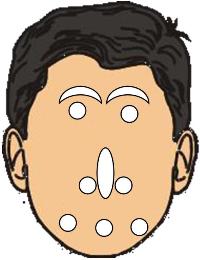
婄傪曄宍偝偣傞忋偱偺僐儞僙僾僩偵偮偄偰偼壓偺傛偆偵 丂婄忋偵栚丆旲偲偄偭偨婄偺摿挜傪昞偡揰傪愝掕偟傑偡丏偦偺揰傪摿掕偺屄恖偺宍忬偵偁偆傛偆偵摦偐偡偙偲偵傛傝丆 丂偝傑偞傑側婄偺宍忬傗丆戝偒偝側偳傪昞尰偟傑偡. |
 |
 |
|
 |
 |
|
| Fig2.婄柺曄宍偺僐儞僙僾僩 | 丂||
| 儘儃僢僩偺徻嵶 |
| 摿挜揰 | 愙崌晹嵽 | 婄儅僗僋 |
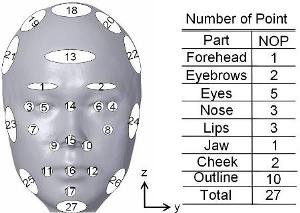 Fig5.摿挜揰攝抲恾 |
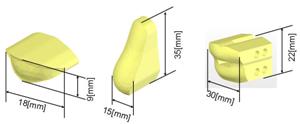 Fig6.愙崌晹嵽 |
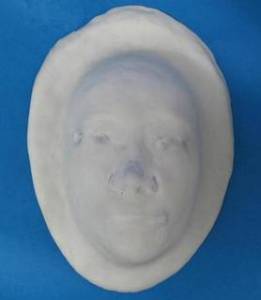 Fig7.婄儅僗僋 |
| 婡峔偵傛傝嬱摦偡傞摿挜揰偼丆栚丆旲,椫妔側偳婄偺摿挜傪昞偡偲巚傢傟傞応強偵27揰攝抲偟傑偟偨丏 | 愙崌晹嵽偼丆暯嬒摢晹柾宆傛傝奺晹埵傪愗傝弌偟偰嶌惉偟傑偟偨丏 | 婄儅僗僋偼丆怢弅惈丆懴媣惈偵偡偖傟偨僙僾僩儞偲偄偆慺嵽偱偱偒偰偄傑偡丏偙偺傗傢傜偐偄儅僗僋傪婡峔偵傛傝帺桼偵曄宍偝偣傑偡丏傑偨儅僗僋偵偼巁壔僠僞儞傪崿崌偟偰偍傝丆岝傪斀幩偡傞偨傔僗僋儕乕儞偲偟偰偺栶妱傪壥偨偟傑偡丏 |
| 婄撪晹嬱摦婡峔 | 椫妔嬱摦婡峔 | |
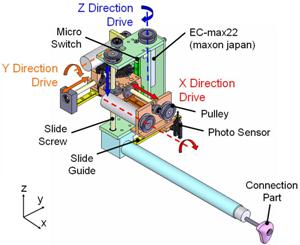 Fig8.婄撪晹嬱摦婡峔 |
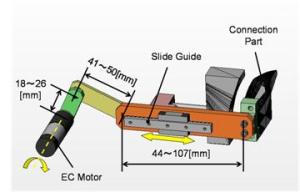 Fig9.椫妔嬱摦婡峔 |
|
| 婄撪晹嬱摦婡峔偼丆儌乕僞乕偲偡傋傝偹偠偵傛傝峔惉偝傟偰偍傝丆倶丆倷丆倸偺俁幉曽岦偵擟堄偺検偩偗愭抂偺婄宍忬晹嵽傪嬱摦偡傞偙偲偑偱偒傑偡丏 | 丂椫妔嬱摦婡峔偵偼僗儔僀僟乕僋儔儞僋婡峔傪嵦梡偟偰偍傝丆愭抂偺椫妔晹嵽偑婄偺椫妔宍忬傪昞偡傛偆偵侾侽屄攝抲偝傟傑偡丏婄偺戝偒偝傪曄壔偝偣傞曽岦偵侾帺桼搙偱帺桼偵嬱摦偡傞偙偲偑偱偒傑偡丏 | 丂
| 儘儃僢僩慡懱恾 |
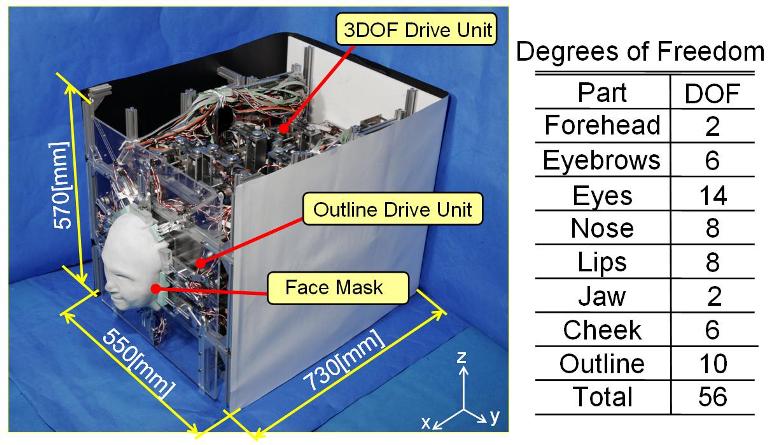
| 俀侽侽俆擭偵奐敪偟偨怴婄儘儃僢僩倂俢亅俀偼壓偺傛偆偵側偭偰偄傑偡丅廮傜偐偄慺嵽偱偱偒偨婄偺儅僗僋忋偺摿挜揰傪丆屻傠偵偲傝偮偗偨婄撪晹嬱摦婡峔乮俁幉嬱摦儐僯僢僩乯丆椫妔嬱摦婡峔偵傛傝慡俆俇帺桼搙偱偦傟偧傟x,y,z幉曽岦偵擟堄偺検偩偗嬱摦偟丆條乆側恖偺婄宍忬傪昞尰偟傑偡丏 摿挜揰偺悢偼婄撪晹侾俈揰丄椫妔侾侽揰偺寁侾俈揰偱偁傝丄婄撪晹偺揰偼俁帺桼搙乮傑偨偼俀帺桼搙乯丄椫妔偼婄偺戝偒偝傪曄偊傞偨傔偺侾帺桼搙偱擟堄偺埵抲偵嬱摦偝傟傑偡丅 |
| 僔僗僥儉峔惉恾 |
儘儃僢僩僔僗僥儉偺峔惉偼壓偺傛偆偵側偭偰偄傑偡丏儘儃僢僩偵傛偭偰昞弌偝傟偨婄宍忬偵偦偺恖偺俀師尦塮憸傪搳幩偡傞偙偲偵傛偭偰婄傪俁師尦揑偵昞弌偡傞偙偲偑偱偒傑偡丏婡峔偼侾帺桼搙枅偵僷僜僐儞偱惂屼偝傟偰偄傑偡丏埲壓儘儃僢僩偺徻嵶偵偮偄偰愢柧偟傑偡丏 丂 |
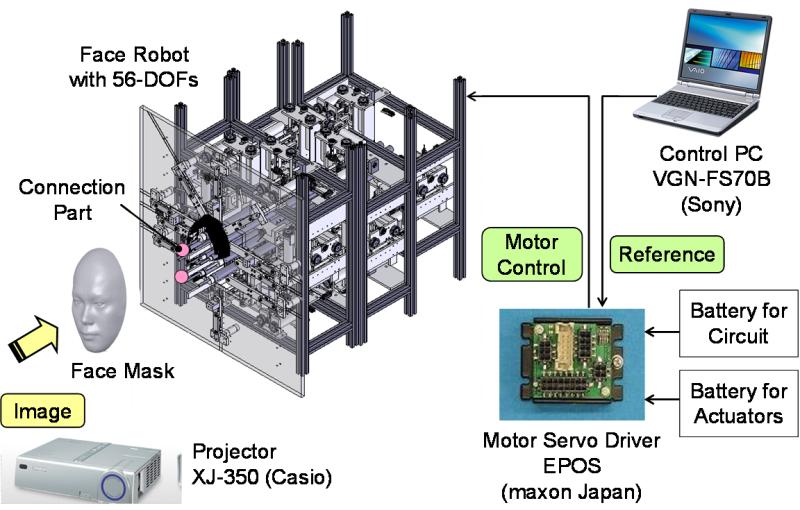 Fig11.僔僗僥儉峔惉恾 |
 |
 |
| 杮恖偺塮憸傪搳幩偟側偄忬懺偱丆俀庬椶偺婄宍忬傪楢懕偟偰昞弌偟偰偄傞塮憸偱偡丏婄儅僗僋忋偺摿挜揰偑堏摦偟偰丆婄宍忬偑曄傢偭偰偄偔條巕偑傢偐傝傑偡丏 | 係恖偺婄宍忬傪昞弌偟丆偦偺恖偺俀師尦塮憸傪儘儃僢僩偵搳幩偟偨偲偒偺塮憸偱偡丏幬傔係俆搙丆墶偐傜偺塮憸傪傒傞偲俀師尦塮憸偩偗偱偼昞尰偱偒側偄丆偦偺恖偺懚嵼姶傕昞弌偱偒偰偄傞偙偲偑傢偐傝傑偡丏 丂丂丂俀師尦塮憸偺婄偺曄傢傝栚偵丆儘儃僢僩偑曄宍偟偰偦偺恖偺婄宍忬傪昞弌偟偰偄傞偺偑傒偰偲傟傑偡丏 |
杮恖偺婄宍忬偲丆倂俢亅俀偵傛偭偰偦偺恖傪昞尰偟偨偲偒偺儘儃僢僩偺婄宍忬傪應掕偟偰斾妑偟傑偟偨丏惵偄晹暘偑岆嵎偺彫偝側晹暘丆愒偔側傞偵偟偨偑偭偰岆嵎偑戝偒偄晹暘偵側偭偰偄傑偡丏 丂丂丂丂寢壥傪傒傞偲丆椫妔偺堦晹傪偺偧偄偰傎傏偁傞屄恖偺婄宍忬傪儘儃僢僩偱昞尰偱偒偰偄傑偡丏婄宍忬慡懱偺暯嬒岆嵎傪應掕偟偨偲偙傠丆3.5mm偲偄偆寢壥偑偱傑偟偨丏 丂 |
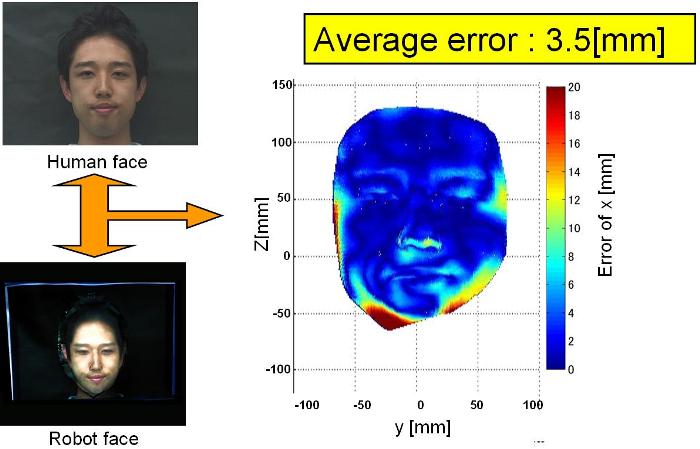 Fig12.昡壙幚尡寢壥 |
| 尋媶偵嫤椡偟偰捀偄偨丆(姅)俶俿俿僪僐儌偺奆條偵姶幱抳偟傑偡丏3DCAD僜僼僩僂僃傾傪偛採嫙偟偰捀偄偨僜儕僢僪儚乕僋僗丒僕儍僷儞(姅)丆僙僾僩儞帋尡曅傪採嫙偟偰捀偄偨(姅)僋儔儗偵姶幱抳偟傑偡丏 |