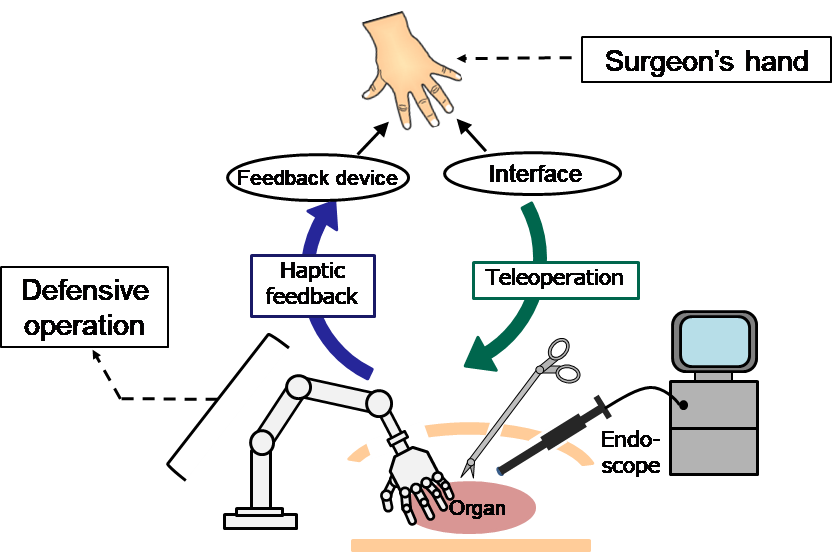
Fig. 1 システム概要図
近年,急速に腹腔鏡手術が普及しています.腹腔鏡手術は低侵襲で患者の負担が少ないという利点を持つ一方で, 器具のみを体内に挿入するため,触覚を使用できません.更に,eye-hand coordinationの難易度が非常に高いため習得難易度が高い手技であるといえます. この難易度を低減させるためにHALS(Hand Assisted Laoarosopic Surgery)という手技が開発されました.
HALSとは,術者の片手を患者の体内に挿入して行う手技のことで,これにより臓器の把持や索引,圧排などの愛護的な操作が可能となります.しかし,HALSは手を挿入した側の腕や肩の著しい疲労をもたらします. この問題を解決するために本研究室ではHALSで挿入する手をロボットハンドに置き換えてそれを術者が直感的に操作するシステムを開発します.
Fig. 1 システム概要図
本システムでは患者の体内に挿入する外科医の手の役割をロボットハンドが担います.HALSでは多くの場合,術者の利き手ではない方の手を挿入するため, 本研究でもロボットハンドは術者の利き手ではない手として機能し,臓器の把持や牽引による術野の確保や,臓器にテンションをかけることで切除等を行いやすくします. これらの動作はロボットハンドのみでは行えないため,ロボットハンドをエンドエフェクタとするマニピュレータも用意し,これも同時に操作します. これらロボットハンド及びマニピュレータは外科医が入力インターフェースを介して操作します. その際,ロボットハンドの動きは外科医の手の動きを反映して動くマスタースレーブ方式をとり,直感的な操作性を目指します. また,外科医の手をロボットハンドに置き換えることで触覚が失われますが,これは操作する指に触覚フィードバックデバイスをつけることで補います. また,内視鏡で得た映像を映すモニタで組織の状態なども提示することで,より安全な手術を可能にすることを目指します.
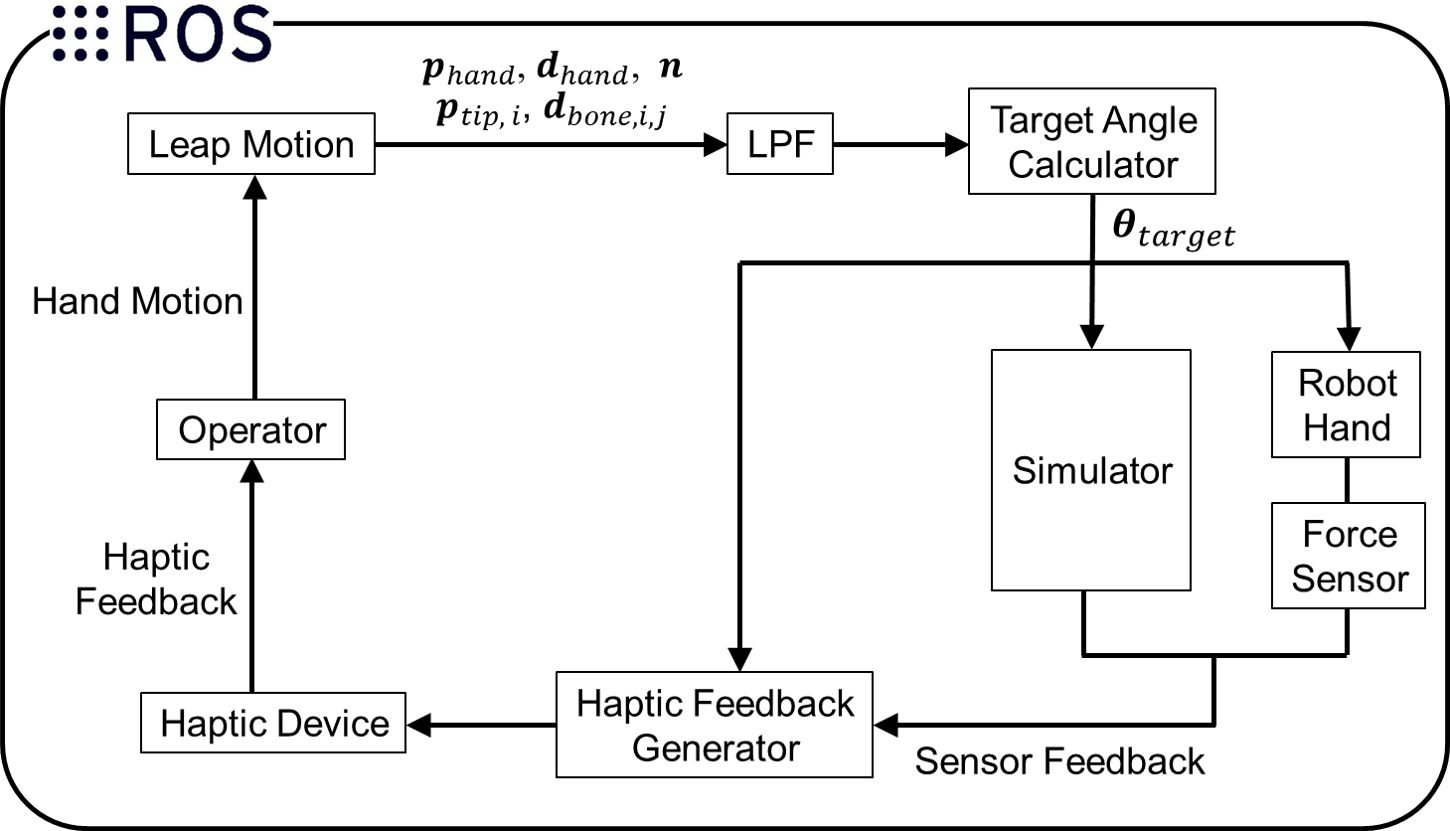
Fig. 2 システム構成図
本研究のシステムはROS(Robot Operating System)を用いています.Leap Motionという入力インターフェースによって手術者の手の関節角度などを検出し, ロボットハンドを動かします.そして,この時受けた力や指の移動量をもとに,触覚デバイスを駆動します. これにより患者体内に挿入されたロボットハンドで臓器などを触った感触を知覚できます.
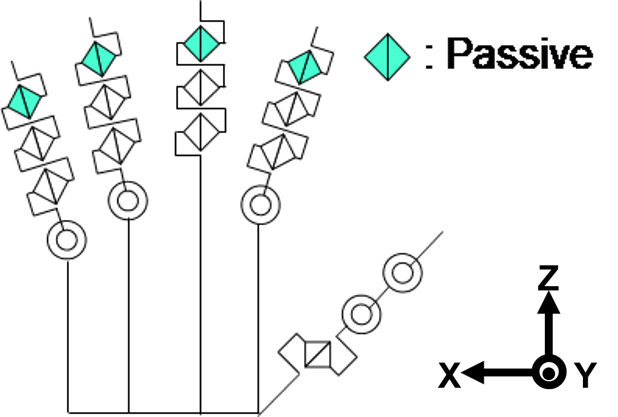
Fig. 3 自由度配置図 |
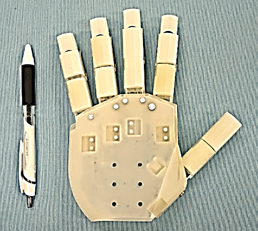
Fig. 4 ロボットハンドの写真 |
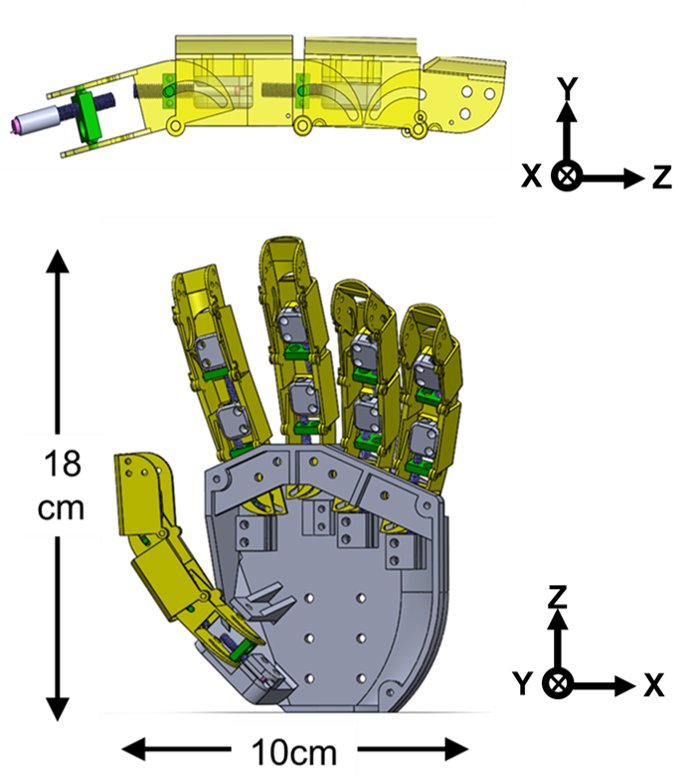
Fig. 5 ロボットハンドのCAD図
人間の手に基づいてロボットハンドを設計しました.ロボットハンドは計14自由度を有します. 機械的な動力損失を最小限に抑え、関節の運動精度を高めるために、関節により近い各指の内側にアクチュエータを配置しました。 アクチュエータは、ねじによる直動運動を曲線型のガイドにより回転運動に変換して関節を駆動します. 現在このロボットハンドをシミュレーション上で動かすことに成功しています.
関連論文
・ A.Omer, et al., "Development of a Remotely Controlled Robotic Hand System for Surgical Application".
Proceeding of the 15th IEEE International Conference on Advanced Robotics and its Social Impacts (ARSO 2019), Beijing, China, November 2019.

Fig. 6 Leap Motion
ハンドトラッキング技術は既に様々な手法にて実現されています.本研究では,手術中の着脱の手間や 触覚フィードバックデバイスを指先につけることを考慮して,非接触式センサを用いることにしました. 用いたセンサはLeap Motion社から販売されているLeap Motionという手専用の小型モーションセンサです.内部には赤外線ステレオカメラが内蔵されており, 奥行きも含めた三次元上の手や各関節の位置情報を取得することができます. ROSと親和性の高いシミュレーションソフトのGazebo上で上述のロボットハンドを動かすことに成功しています.
関連論文
・ A.Omer, et al., "Development of a Remotely Controlled Robotic Hand System for Surgical Application".
Proceeding of the 15th IEEE International Conference on Advanced Robotics and its Social Impacts (ARSO 2019), Beijing, China, November 2019.
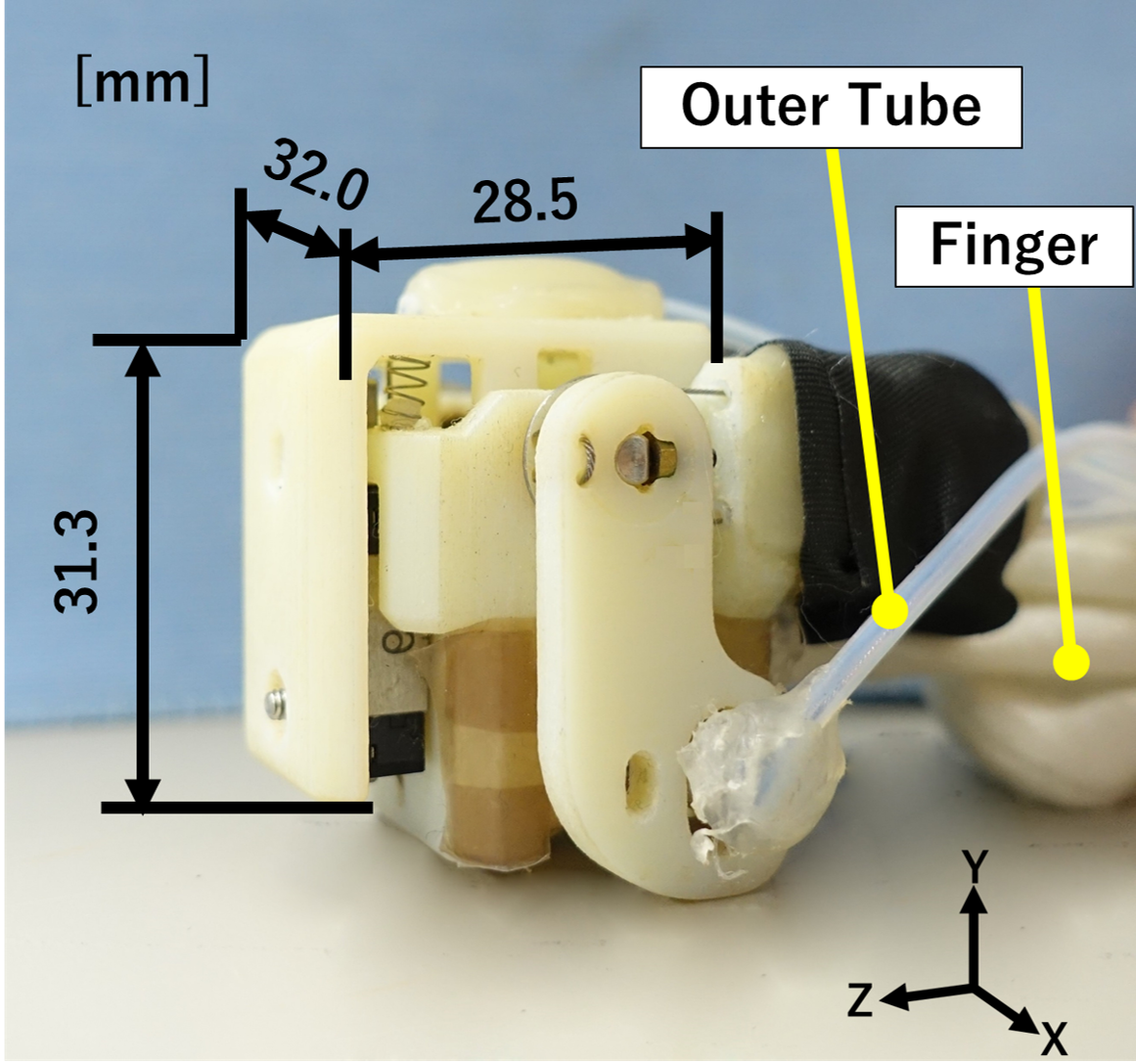
Fig. 7 触覚デバイスの写真
物体との三次元的な接触を知覚できるよう,垂直方向の力(Y軸方向)と二方向のせん断力(X,Z軸方向)を提示可能な触覚デバイスを開発しました. 触覚提示はプラスチック製のプレートを能動的に動かして人間の指腹を変形させることで実現します.デバイスに直接モータを 取り付けず,ワイヤ伝達によって駆動することでより軽く小さな設計を目指しました.これにより装着者の指にかかる負担を軽減します.
本研究は,サウジアラビアのウンム・アル・クラ大学外科部門のジャマル・ハムディ教授の協力を得て実施された. 本研究は早稲田大学次世代ロボット研究機構の下で実施された. ロボットハンド機構の設計と開発における 株式会社テムザック の支援と支援に感謝します。 本研究で用いられた3DCADはソリッドワークス・ジャパン株式会社 化学研究費補助金(15K21436,18K18406)の支援を受けた.各社・官公庁に感謝致します.
Last Update: 2019-11-15