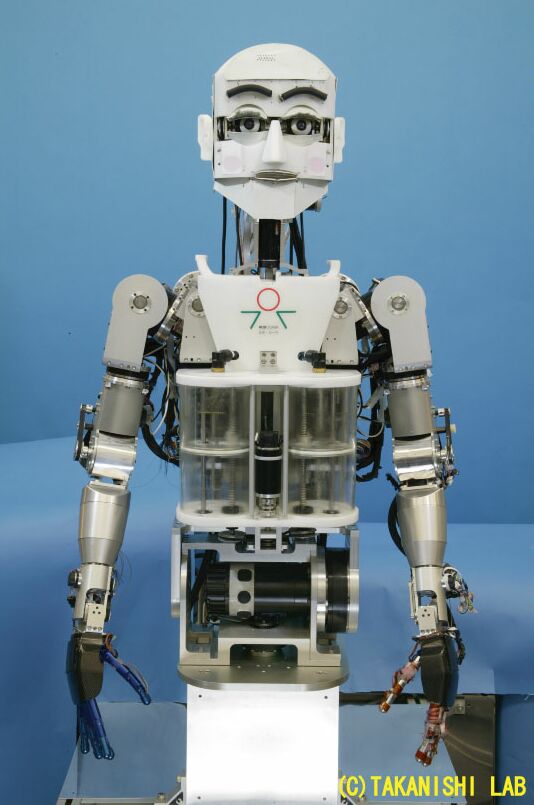
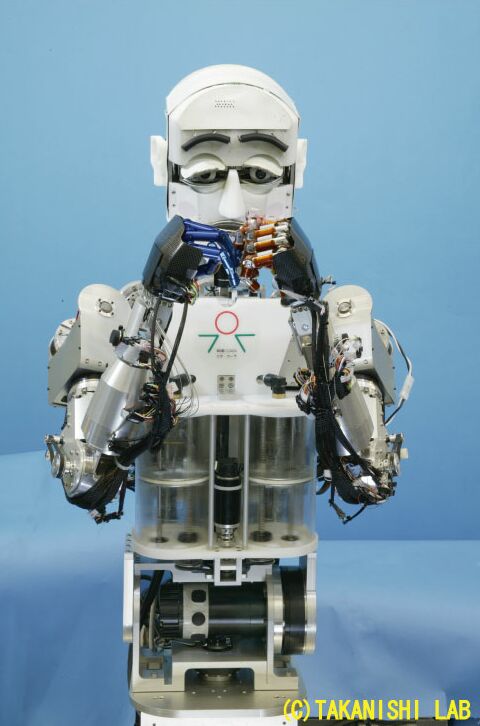
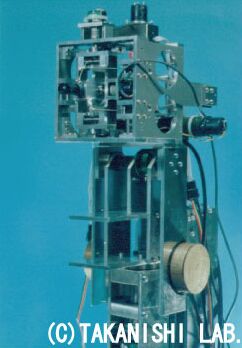
Fig. 1 WE-4RII (�S�̐}) |
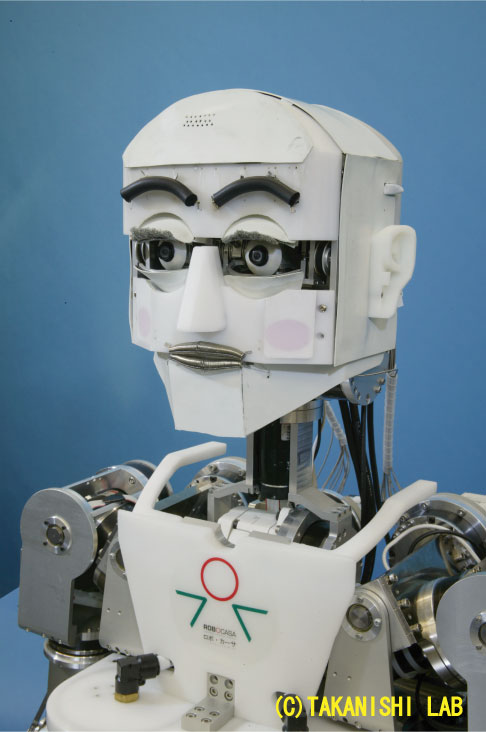
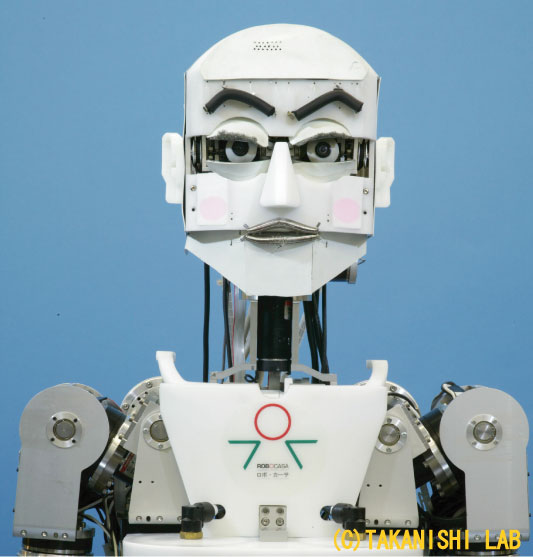
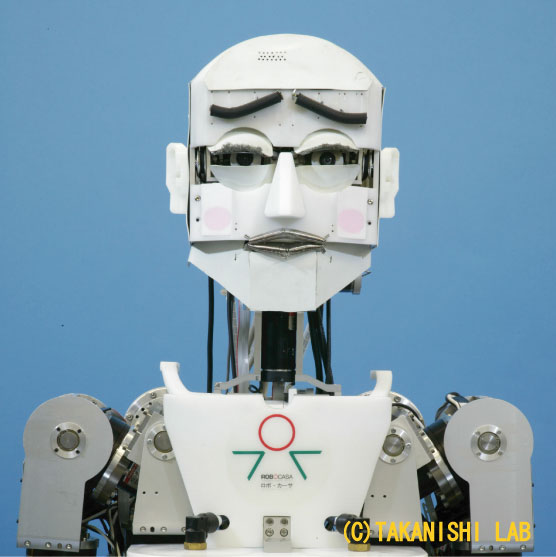
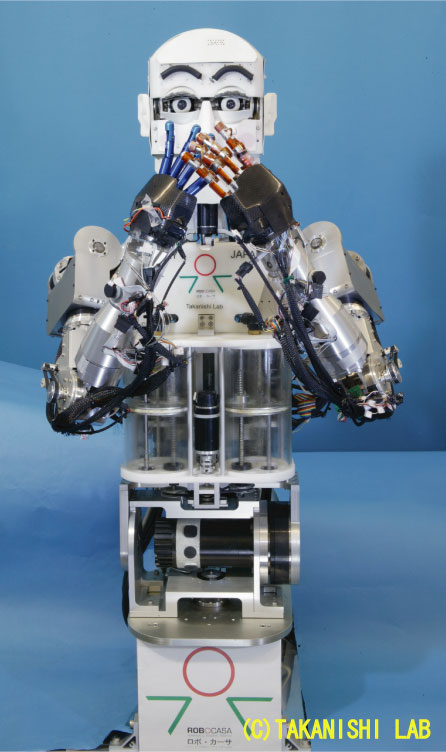
Fig. 2 WE-4RII (����) |
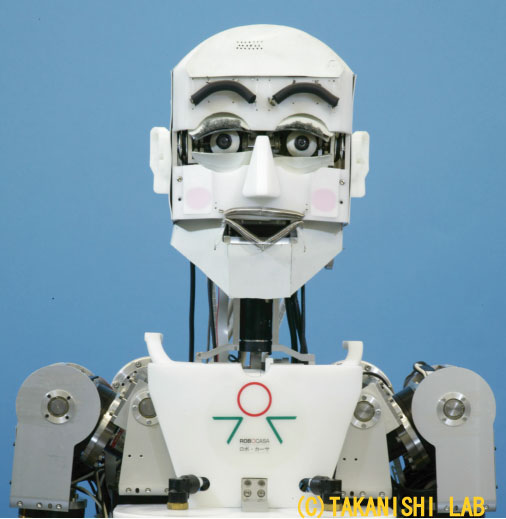
�{�����ł́C�l�Ԍ`�������{�b�g�̊J�����s�����Ƃɂ���āC�l�Ԃ̒m�o�E�F���@�\���H�w�I�ϓ_����𖾂��C�l�ԂƂ̉~���ȃR�~���j�P�[�V�������\�Ƃ��邽�߂ɕK�v�ȃ��{�b�g�̌`�ԂƋ@�\�̎�����ڕW�Ƃ��Ă��܂��D
�����������ł�1995�N��蓪�����{�b�gWE�V���[�Y�̊J����i�߂Ă���C2002�N�ɂ́C�\���ё̊��̓����ɂ���\�o���\��WE-4 (Waseda Eye No.4)���J�����C2003�N�C���L���ȏ�\�o��ڎw���CWE-4�ɐS���u���^9���R�x���{�b�g�A�[���𓋍ڂ�����\�o�q���[�}�m�C�h���{�b�gWE-4R (Waseda Eye No.4 Refined)���C������2004�N�C�Ў�6���R�x�̏�\�o�E�c���E�G�o�@�\��L����l�Ԍ`���{�b�g�n���hRCH-1 (RoboCasa Hand No.1)��WE-4R�ɓ������邱�Ƃɂ���\�o�q���[�}�m�C�h���{�b�gWE-4RII (Waseda Eye No.4 Refined II)���J�����܂����D
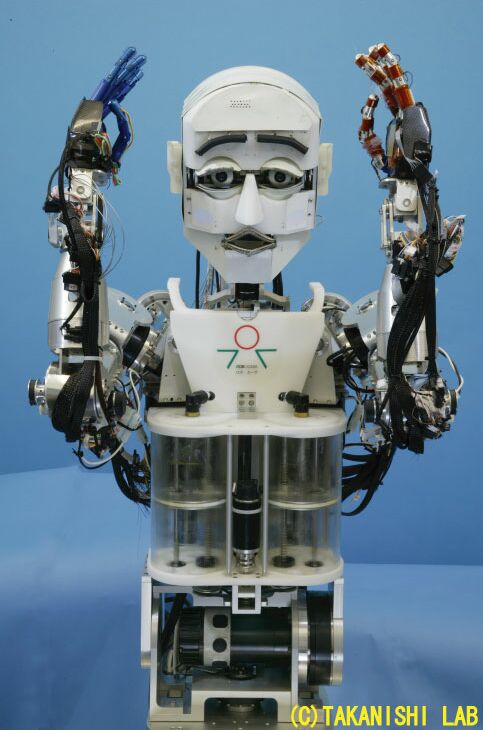
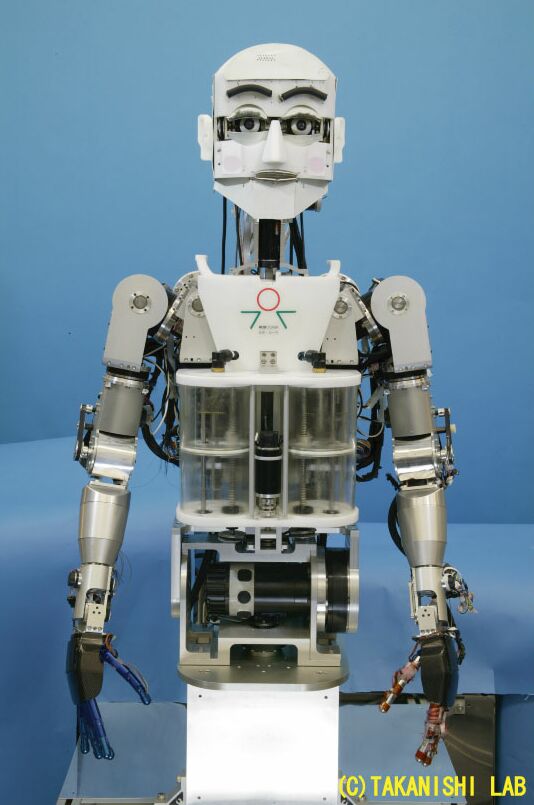
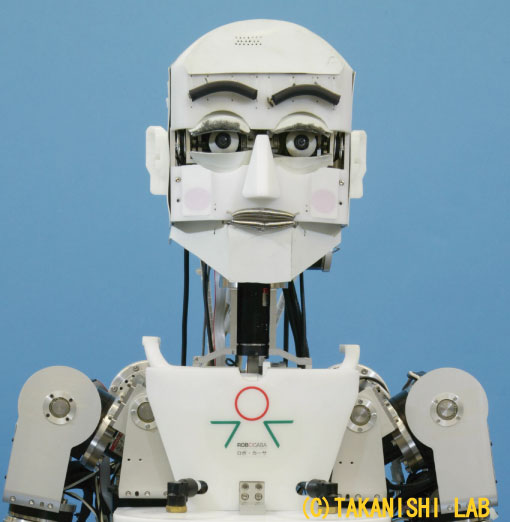
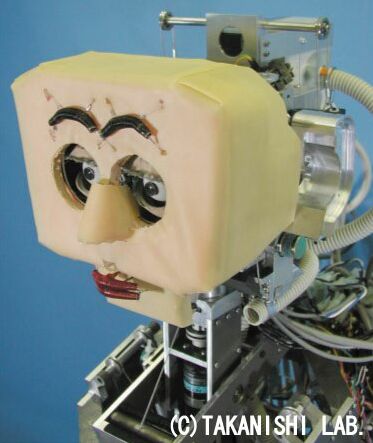
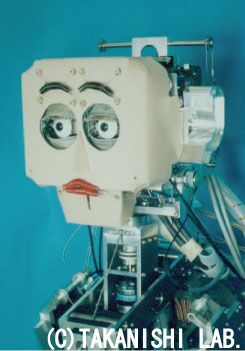
���̎ʐ^����\�o�q���[�}�m�C�h���{�b�gWE-4RII�ł��DWE-4RII�͑S59���R�x(��F12�C�r�F18�C���F2�C��F4�C�ዅ�F3�C���فF6�C���F8�C���O�F4�C�{�F1�C�x�F1)��L���Ă���C�O������̎h���ɑ��銴�o�튯�Ƃ��āC����̃Z���T(���o�C���o�C�G�o�C�k�o)�𓋍ڂ��Ă��܂��D�ȉ��ɏڍׂ�������܂��D
|
Fig. 1 WE-4RII (�S�̐}) |
Fig. 2 WE-4RII (����) |
�ዅ����3���R�x�ŁC�s�b�`�������E���ʂɂȂ��Ă��܂��D�ዅ�̍ō��p���x��600[deg/s]�Ɛl�ԂƓ����̉^�����\��L���܂��D���ٕ��͕Б�3���R�x�ŁC�㉺�̊J����ɉ����C�㕔���ٕ��ɂ͉�]���삪�\�ŁC�ڐK�̏グ�������\�ɂȂ��Ă��܂��D�܂��C���كt���[���ɂ̓S�����̖���\��t���Ă��܂��D���ٕ��̊J�ɂ�����ő�p���x�͐l�ԂƓ�����900�mdeg/s�n�ł���C0.3[s]�ȓ��̏u�ڂ��\�ł��D
WE-4�ł́C�����̊ዅ���Ɗ��ٕ�����̍\�������ዅ���j�b�g���J�����邱�ƂŁC�����̏��^�E�y�ʉ����������܂����D����ɁC�ዅ�̃s�b�`���̓����Ɗ��ق̊J��������J�j�J���ɓ�������\���Ƃ��C�n�[�h�E�F�A�ɂ��ዅ�Ɗ��ق̋���������������܂����D
Fig. 3 �ዅ�E���ٕ��@�\�}
�͏㕔�s�b�`�E�����s�b�`�E���[�E���[������4���R�x�ƂȂ��Ă��܂��D�s�b�`����2���������邱�ƂŁC���˂��o������C�������肷�铮�����\�ł��D��̉^�����\�͐l�ԂƓ����ŁC160[deg/s]�œ���\�ł��D
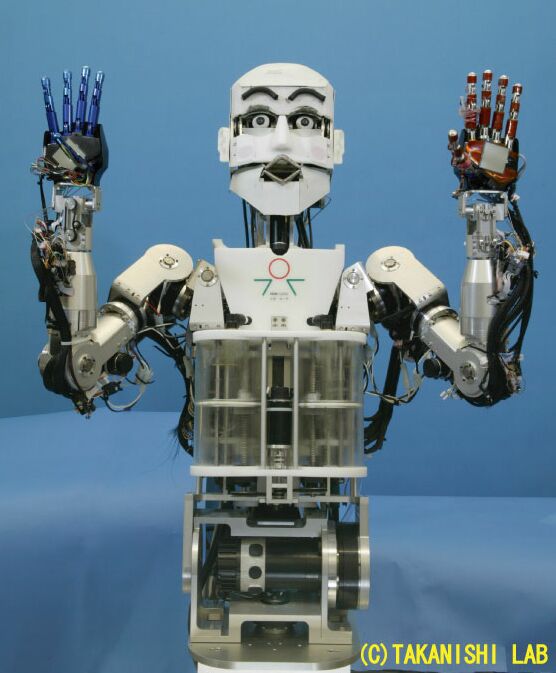
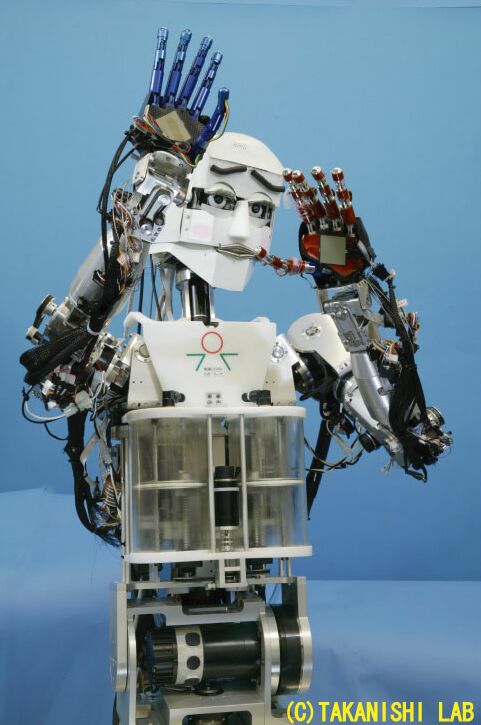
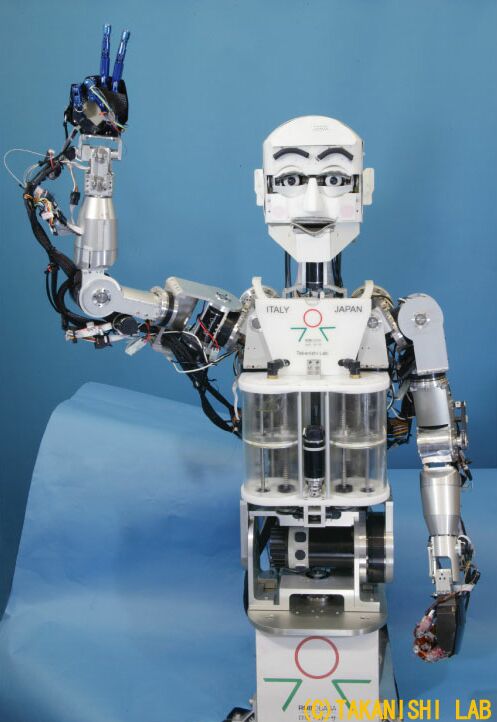
�r���ɂ́C���S�̂������ƂŁC��\�o�\�͂����コ����9���R�x�S���u���^�q���[�}�m�C�h�A�[���𓋍ڂ��Ă��܂��D��̓I�ɂ́C���t����(�s�b�`�E���[��)�C��(�s�b�`�E���[�E���[����)�C�I(�s�b�`��)�C���(�s�b�`�E���[�E���[����)����\������Ă��܂��D����ɂ��C�u�{��v�̎��͌��������点����C�u�߂��݁v�̎��͌��𗎂Ƃ����肷�邱�Ƃ��ł��C�r�ɂ��L���ȏ�\�o���\�Ƃ��Ă��܂��D
Fig. 4 �S���u���^9���R�x���{�b�g�A�[��
�n���h���̓q���[�}�m�C�h���ۋ��������� ROBOCASA �ɂĊJ�����s���C�C�^���A�̐��A���i��w�@��w ARTS Lab. �ɂĐv�E���삳�ꂽ�l�Ԍ`���{�b�g�n���hRCH-1 (RoboCasa Hand No.1)�𓋍ڂ��Ă��܂��D

Fig. 5 RCH-1
RCH-1�̊e�w�̓��C���쓮�ƂȂ��Ă���CFig. 6�̂悤�ɃA�N�`���G�[�^�ɐڑ����ꂽ���C���́C�v�[���ƃo�l������ɔz�u���ꂽ�e�߂�ʂ�C�w��ɂȂ����Ă��܂��D�e�߂̃v�[���͂������������Ɏ��R�ɉ�]�\�ƂȂ��Ă��邽�߃A�N�`���G�[�^���쓮���C���C�������������Ă�����Fig. 7�̂悤�ɁC���̂̌`��ɂȂ炤�悤�ɁC�w�����Ȃ��Ă����܂��D����́C�e�߂̃v�[�����Ɨ����ĉ�]�\�Ȃ��߂ŁC���G�Ȑ����p�����ɋ@�\�ɂ����肵���c�����\�ł��D
Fig. 6 �w���@�\
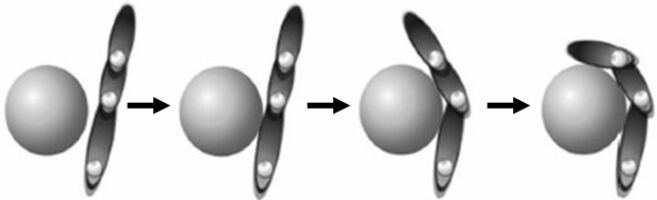
Fig. 7 �c���@�\
�q�g�͋���̕��̂�c������ꍇ�ɂ͐e�w���O�]�����ɊJ���C���w�ƌ����������悤�Ȉʒu�Œ͂ނ̂ɑ��C�~����̕��̂�c������ꍇ�́C�e�w����]�����ɉ�]�������w�ƌ����������ʒu�Ŕc�����Ă��܂��D���̐e�w�̓��]�E�O�]�^���ɂ��C���̂̈��肵���c�����\�ƂȂ��Ă��܂��D
RCH-1�ɂ͐G�o�@�\�Ƃ��āC���z�^on/off�R���^�N�g�Z���T�CFSR�C3D Force �Z���T��3��ނ̃Z���T������Ă��܂��Don/off�R���^�N�g�Z���T�́C������̃X�C�b�`�ł���CFig. 8�̂悤�Ɏw�̕�15�ӏ��C��1�ӏ��̍��v16�ӏ��ɔz�u���Ă��܂��DFSR��WE-4�V���[�Y�̓����ɗp�����Ă�����̂Ɠ���̂��̂�2�w�ɏd�ˍ��킹�邱�ƂŁC�ڐG���̗͂̑傫�������ł͂Ȃ��C�ȂŁE�������E������3��ނ̐G��������ʉ\�ł��D�܂��C3D Force �Z���T�͐e�w�Ɛl�����w�̎w��ɓ�������Ă���C�w��̗͂𑪒�\�ł��D
Fig. 8 RCH-1�G�o�Z���T
WE-4RII�ł̓��[���ƃs�b�`���ō\������鍘��̊����Ɏ����Ă��܂��D�����̓����ɂ��C���łȂ��㔼�g�S�̂ɂ�郍�{�b�g�̏�\�o���\�ƂȂ��Ă��܂��D
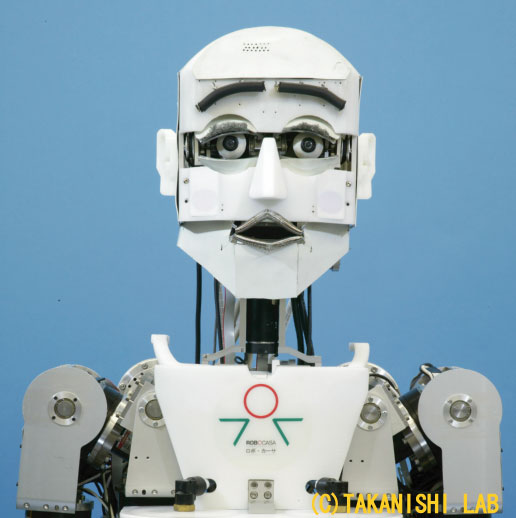
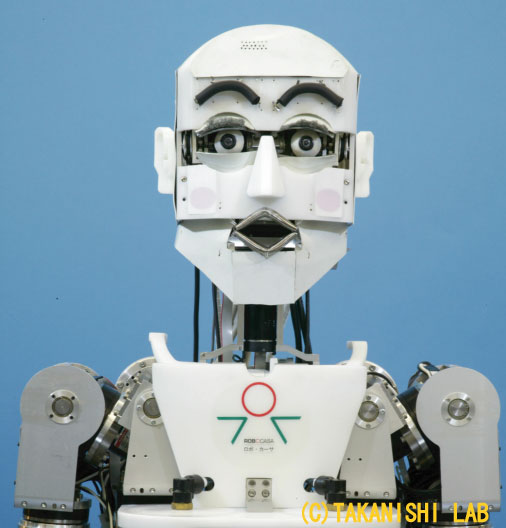
WE-4RII�͔��E���O�E�{�E��F�E���ɂ���\�o���\�ł��D���ɂ͐L�k���������X�|���W���g���Ă���C�Д�4���R�x��L���܂��D�����4�_�����C���ŏ㉺�ɋ쓮���邱�ƂŁC�`�ω����܂��D
���O���ɂ͖a���`�̃o�l���g�p���Ă���C���E4�������烏�C���ň�������C�`���ω������C�{���g�p���ĊJ���s���܂��D
��F�Ƃ��āC�ԐF�ƐF��EL(Electro Luminescence)�V�[�g���g�p���邱�ƂŁC2�F��F���\�o�\�ł��DEL�͍��E�̖j�ɔz�u���܂����D
�����ɂ͌����ɏ��^�X�s�[�J�[�𓋍ڂ��CLaLaVoice 2001(����)�ɂ�鍇�����ɂ�锭�������܂��D
Fig. 9 �\��\�o�@�\
���o�Z���T�Ƃ��āC����ɃJ���[CCD�J�����𓋍ڂ��Ă��܂��D2��CCD�J��������擾���ꂽ�f���́C�摜�L���v�`���{�[�h�ɂ���ăp�\�R���Ɏ�荞�܂�܂��DWE-4RII�͓����ɔC�ӂ�8�F�����W�Ƃ��邱�Ƃ��ł��C������ɂ����鎋�W�̖ʐς���яd�S���v�����C������ځE��E���ɂ���ĒǏ]�ł��܂��D����ɂ��C�C�ӂ̐F�������W�ɑ���3������ԓ��ł̒Ǐ]���������Ă��܂��D
Fig. 10 ���o�Z���T
���o�Z���T�Ƃ��āC���E�̎��̉��ɏ��^�R���f���T�}�C�N�𓋍ڂ��Ă��܂��D�����č��E�̉��������特���̕�����m�o�ł��܂��D
�畆���o�Ƃ��āC�G�E���o�ƁC���o�𓋍ڂ��Ă���D�G�E���o�Z���T�ɂ́CFSR(Force Sensing Resistor)���g�p���Ă��܂��DFSR�͔��Ɏア�͂ł����o���\�ł���C�����Čy�ʂȃf�o�C�X�ł��D�������́C2����FSR���d�˂ē\�邱�Ƃɂ��C�͂̑傫���݂̂łȂ��C�u�����v�u�Ȃł�v�u�������v�̐G����̈Ⴂ�����o���邱�Ƃ��\�Ƃ��܂����D����C���x�Z���T�Ƃ��ẮC�T�[�~�X�^��p�����Z���T�𓋍ڂ��Ă��܂��D�܂��C��̍b�ɂ�FSR��\��C�Ώە��̐ڐG�̗L�������m�\�Ƃ��Ă��܂��D
�k�o�Z���T�Ƃ��ẮC�@�̉���4��̔����̃K�X�Z���T��z�u���C�x�ɂ���ĕ@���瑧���z�����ނ��ƂŁC�u�A���R�[���v�u�A�����j�A�v�u�����̉��v��3��ނ̃j�I�C�����ʂł��܂��D
Fig. 11 �k�o�Z���T
�����s�b�`�����[�^�ɗ����d�����C�d���Z���T�Ōv�����邱�ƂŁC���m���������Ƃ��̑Ώە��̏d�ʂ�F���\�Ƃ��Ă��܂��D
��\�o�q���[�}�m�C�h���{�b�gWE-4RII�̑S�V�X�e���\����Fig. 12�̂悤�ɂȂ��Ă��܂��D���{�b�g�̐���ɂ�3��̃p�[�\�i���R���s���[�^(PC/AT�݊��@)���g�p���Ă���CEthernet�ɂČ݂��ɐڑ�����Ă��܂��D
PC1(Pentium 4, 2.66[GHz]�COS: Windows XP)�ł́C�k�o�E�畆���o�Z���T����̏o�͂�12�r�b�gA/D�{�[�h�Ŏ擾���C�h���̉�͂��s���Ă��܂��D�܂��C�T�E���h�J�[�h��p���āC���o�����擾���Ă��܂��D�����̏���PC2���瑗�M���ꂽ�n���h�̃Z���T���сCPC3���瑗�M���ꂽ���o�������C���{�b�g�̐S����Ԃ���эs�������肵�Ă��܂��D����ɁC�Z���T���ƐS����ԁC�o�͂���s���Ɋ�Â��āC�n���h�ȊO�̃��[�^�̈ʒu������s���Ă��܂��D�����ɁCPC2�ɑ��ăn���h�̐�����𑗐M���Ă��܂��DPC2(Pentium �V, 1.0[GHz]�COS: Windows 2000)�ł́CRCH-1�̃Z���T����12�r�b�gA/D�{�[�h����сC�f�W�^��I/O�{�[�h�ɂ��擾���C�h���̉�͂��s���Ă��܂��D��͂��ꂽ�Z���T����PC1�ɑ��M����C�܂��CPC1���瑗�M���ꂽRCH-1�̐�����Ɋ�Â��āCRCH-1�̈ʒu������s���Ă���DPC3(Pentium 4, 3.0[GHz], OS: Windows XP)�ł́CCCD�J��������̉f�����擾���C���W�̏d�S�v������ыP�x�v�����s���CPC1�ɑ��M���Ă��܂��D
Fig. 12 �V�X�e���\���}
�\��̐���ɂ�Ekman��6��{�\����̗p���Ă���C"���"�C"�{��"�C"����"�C"�߂���"�C"����"�C"����"�C6�̏�ɑΉ�����\���"�ʏ���"��������7�̊�{�\��p�^�[�������炩���ߒ�`���Ă��܂��D�����āC���{�b�g�̕\��\�o�p�����[�^�ł�����E���O�E��F�E��E�r�E��E���̕ψʂ�"�ʏ���"�Ƃ̊Ԃ�50�i�K�ɔ���Ԃ��C��̋����Ɗe���̓����̑傫����Ή������邱�ƂŁC���l�ȕ\��\�o���\�Ƃ��Ă��܂��DWE-4RII�ł�Fig. 14�Ŏ������\���\��p�^�[���Ƃ��Ē�`���Ă��܂��D�\��E�r�E��E���̓����ɂ�葽�l�ȕ\�o���\�ł��D

|
|
|
|
| (a) ��� | (b) ���| | ||
|
|
|

|
| (c) ���� | (d) �߂��� | ||

|
|
|
|
| (e) �{�� | (f) ���� | ||
|
|
||
| (g) �ʏ� | |||
|

|
|
|

|

|
||
| (h) �V��\�o�p�^�[�� | |||
Fig. 14 WE-4RII�̏�\�o
WE-4RII�̐S�����f���̍\�z�ɂ������āC�{�����ł́CFig. 14�̂悤�ɔ]�ˁE��E�m�\��3�w�\���ɕ����C���ˑ�����S�����f���̃A�v���[�`�������Ȃ��Ă��܂��D�����āC��̕��������̍�p���Ԃɂ���āC3�i�K�ɍ\�������C��p���Ԃ̒���������C�w�K�E�C���E�_�C�i�~�b�N���X�|���X�Ƃ��邱�ƂŁC�O�����邢�̓��{�b�g��������̎h���ɂ��S����ԑJ�ځC���Ȃ킿�CMental Dynamics�̎�����ڎw���Ă��܂��D
����ɁC���{�b�g�Ɛl�Ԃ̑o�����C���^���N�V�������������邽�߂ɁC�}�Y���[�̗~���K�w�_���Q�l�ɁC�H�~�E���S�~���E�T���~������\�������~�����f�������C�~���Ɋ�Â����s���������\�Ƃ��Ă��܂��D�܂��C���{�b�g�̍s���Ώۂm�ɂ��邽�߁C������̈ӎ��̂R�w�\�����Q�l�Ɉӎ����f�������C�s���̑��l�����������邽�߁C�I�y�����g�����t���w�K�ɂ��ƂÂ��s�����f�������܂����D
Fig. 14 �S�����f���ւ̃A�v���[�`
WE-4RII�͓��͂��ꂽ�h���ɂ���āC���ꍏ�Ǝ��g�̐S�����(=����)��ω������C�����\����F�C�̂̓����Ȃǂɂ���ĕ\�����܂��D�S�����f���̏��̗���Ƃ��āCFig. 15�̂悤�ȃ��f�����\�z���Ă��܂��D�����ɂ͑傫�ȗ��ꂪ2����C������O�E����̎h���ɂ�闬��C������������{�b�g�̓��I��Ԃɂ�闬��ł��D�܂��C�l�Ԃ͂ЂƂ�ЂƂ萫�i���قȂ��Ă���悤�ɁC���{�b�g�ɂ��p�[�\�i���e�B�����邱�ƂŁC�����������悤�Ƃ��Ă��܂��D���{�b�g�̐S����Ԃ�����ŁC�O��ɂ��銴����E�\�o����2�����{�b�g�p�[�\�i���e�B�ƂȂ�܂��D�~���Ɗ����2�w�\���ƂȂ��Ă���C�~���͊�������Ⴂ�w�Ɉʒu�Â��Ă��܂��D�܂��C�����������ƂŊ���Ɨ~���͑��ݍ�p���\�ƂȂ��Ă��܂��D
Fig. 15 �S�����f���ƃp�[�\�i���e�B
���{�b�g�p�[�\�i���e�B�͊�����ƕ\�o������Ȃ�C�O�҂͎h���������Ɋ���ɍ�p���邩���C��҂͊�����ǂ̒��x�\�o���邩�����肵�Ă��܂��D�����̃p�[�\�i���e�B�͔C�ӂɐݒ肷�邱�Ƃ��ł��C�e�Ղɑ��l�ȃp�[�\�i���e�B���\�ł��D����ɁCWE-4�ł́C�ߋ��̌o�����w�K���C���̊w�K�Ɋ�Â������I�ȃp�[�\�i���e�B���`�����邱�Ƃ��ł��܂��D
WE-4RII�ɂ́CFig. 17�̂悤�ɉ��x�C�o���x�C�m�M�x��3������Ȃ�S����Ԃ��`���Ă��܂��D�����āC�S����ԓ��ɒ�`������x�N�g��E�ɂ���ă��{�b�g�̐S����Ԃ͕\����܂��D����ɁC���{�b�g�ɋC��(���[�h)��\�������邽�߁C���x�C�o���x��2������\�������C���x�N�g��M�����܂����D
�C���x�N�g���̉��x�́C�O������̎h���ɂ���ď������ω�������̂Ƃ��܂����D����C�o���x�́C�����_�o�n�Ƃ��đ̓����v��g�ݍ��ނ��ƂŁC�\�����Ă��܂��D����ɂ��C���{�b�g�̊o�����x���ɐl�ԂƓ��l�Ɏ��������������邱�Ƃ��ł��܂����D
�O������h�������͂����ƁC���{�b�g�̐S����Ԃł����x�N�g��E�́C��������ƌĂ�ł���������ɏ]���ĕω����Ă����܂��DWE-4RII�ł͉^�������������f���ɂ���2�������������ɂ�������������Ă��܂��D����ɂ��C���{�b�g�̐S����Ԃɂ����āC�h����p��̒���Ԃ����łȂ��C�h������p���̉ߓn��Ԃ��\���\�ƂȂ�C��蕡�G�ő��l�ȏ�O�Ղ�������悤�ɂȂ�܂����D
�܂��C���{�b�g�̐S����Ԃɑ��āCFig. 17�̂悤��7��ނ̊�����}�b�s���O���Ă���C���{�b�g�̐S����Ԃ����肷�邱�ƂŁC���{�b�g�̊������ӂɌ��肵�܂��D
Fig. 16 �S�����
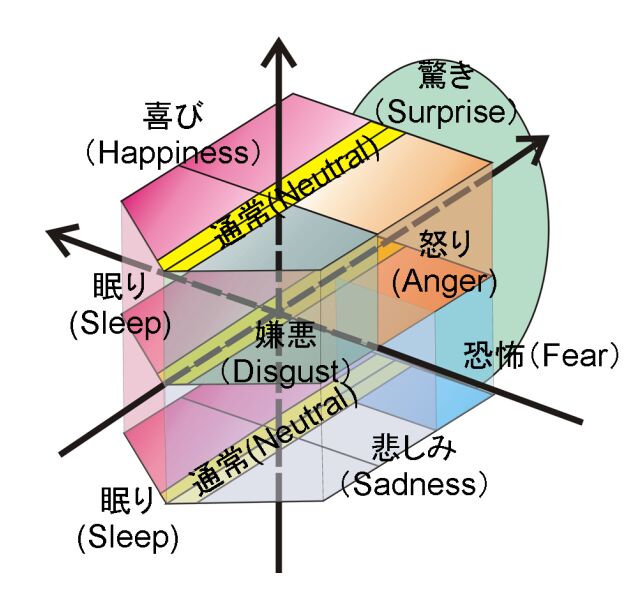
Fig. 17 ����}�b�s���O
���{�b�g�Ɛl�Ԃ̑o�����C���^���N�V�������������邽�߂ɂ́C���{�b�g����̎����I�ȍs�����K�v�ł���D�����ŁC���{�b�g�̗~����Ԃł���~���s��N�́C�~���������ƌĂ��C�h���Ɗ������ϐ��Ɏ��C1���̍����������ɂ���ĕ\������܂��D���݁C���{�b�g�̗~���́C�H�~�E���S�~���E�T���~����3�v�f�ɂ���č\�����Ă��܂����C�����I�ɂ͗v�f�����g���\�ƂȂ��Ă��܂��D
�H�~�͐l�Ԃ̏���G�l���M�[�Ɉˑ����C���Âɂ��Ă����Ԃł�������b��ӃG�l���M�[�Ɖ^���ɂ������G�l���M�[�̘a�Ƃ��ĕ\����܂��D��b��ӃG�l���M�[�̓��{�b�g�̐S����Ԃɂ���ĕω����C���{�b�g�̏���G�l���M�[�̓��{�b�g�ɗ���鑍�d���ʂȂǁC���I�������͊O�I�h���Ɉˑ�����ƍl���Ă��܂��D
���S�~���͐l�Ԃ����O�E�ɑ���h�q�ԓx�̈��ł����D�ߎ��̔����Ƃ��Đ��̖h�䔽�˂�����܂����C���̖h�䔽�˂������h���ɑ��锽�˓I�ȉ���s���ł���̂ɑ��āC���S�~���͔��ˍs���������ԓI�ɒ����h���ɑ���h�䔽���ƂȂ�C�ア�댯�h���ł����Ă��C�A���I�ɓ��͂���邱�ƂŁC���̊댯����F�����C�댯�����h�q�ԓx�Ȃǂ̍s���������N�����D�����̓��{�b�g���O�E����댯�h�����������Ƃ��ɁC�h�������͂��ꂽ���ʂƋ��x���L�������邱�Ƃň��S�~�����������܂����D
�T���~���Ƃ͐l�⓮�����V������ʂ�Ώۂɏo��ƁC�D��S�������ĒT���s�����N�����Ƃ�����{�I�~����1�ł��D���{�b�g�ɓ��͂��ꂽ���o�h���Ƃ��̑Ώە��������������֘A�Â��ċL�������邱�ƂŒT���~�����������܂����D
���{�b�g�̗~�������܂�ƁC�~���������߂Ƀ��{�b�g�������I�ɍs����I�����C���̍s����\�o���܂��D���̌��ʁC�~������������Ȃ��ꍇ�C�~�������������܂ŁC�~���������Ƃ��܂��D�܂��C�~�������{�b�g�̓��I�h���̈��Ƃ݂Ȃ��C�~���ɑ��銴������`���邱�ƂŁC�~���͍s���̐��������łȂ��S����Ԃւ̍�p�������N�����܂��D
�q�g�̍s�����\�o�ɂ͕K���ӎ������݂��C�ӎ��̑ΏۂɌ������āC�s���E��\�o���s���Ă��܂��D�����ŁC�ӎ����f�������邱�ƂŁC���{�b�g�̈ӎ����ǂ̑ΏۂɌ������Ă��邩�𖾂炩�ɂ��C���{�b�g�̍s������薾�m�Ȃ��̂ɂ��邱�Ƃ��\�ɂȂ�܂��D
�q�g�͊o���x���Ⴂ��Ԃł́C�h���ɑ��锽�����݂��Ȃ�X��������C�o�����x���̈ӎ��́C�q�g�̊o���x�ƍ������֊W�������Ă��܂��D�����ŁC���{�b�g�̊o���x�ɉ����Ĉӎ����ʂ��`���邱�ƂŁC���{�b�g�̊o���x���Ⴂ��Ԃł́C�ӎ����ʂ�0�ɋ߂��Ȃ�C�o�����x���̈ӎ����Ȃ���Ԃ�\���C�t�Ɋo���x��������Ԃł͈ӎ����ʂ��傫���Ȃ�ӎ��������Ԃ�\�����Ƃ��\�ł��D
�A�E�F�A�l�X�͓���̑Ώۂ⎖�ۂɌ������ӎ��̂��Ƃ��w���Ă���C�q�g�̏ꍇ�C�ӎ��̌����₷���͋����̗\�����C�h���̋��x����ї~����Ԃɑ傫���ւ���Ă��܂��D�A�E�F�A�l�X�ł͂����̗v���Ɋ�Â��āC�����̑Ώۂ����݂��Ă���ꍇ�ł��C���{�b�g���g���ł��傫�Ȉӎ��������Ă���h����I�����邱�Ƃ��\�ł��D����ɂ��C���^���N�V�������s���Ă��鑊��ɂǂ̑Ώە��ɑ��Ĉӎ��������Ă��邩��`���邱�Ƃ��\�ł��D
�q�g�̍s���͑��l����L���Ă���C�ɍ��킹�čœK�Ɣ��f�����s�����o�͂��邱�Ƃ��\�ł���C���̔��f�͎��g�̌o���ɂ���Ċw�K���邱�Ƃ��ł��܂��D���{�b�g�̍s���ɑ��Ă����l�ȃV�X�e�����K�v�ł���ƍl���C�S���w�ɂ�����s���̃��f���ł���I�y�����g�����t���w�K�Ɋ�Â��s�����f�������܂����D����ɂ��C���g�̐S����Ԃ�~����ԂɊ�Â��āC�����I�ɍs���̏o�͂��\�ƂȂ�܂����D
�l�Ԃ̋L���́C��ʂɁC�C���̉e������Ƃ���Ă��܂��D���̂P���C���̏�Ԉˑ����ŁC���̋C���ő̌������o�������C���̓��e�̉��C�s���ɂ�����炸�C�Ăё̌������Ƃ��̋C���ɂȂ�ƊȒP�ɍĐ������X���������܂��D����C������̋C���́C���̋C���ƈ�v����L�����ĂыN�����C�܂�C�����C���͉��L����z�N�����C�s���ȋC���͕s���L����z�N������X��������C������C���K�����Ƃ����܂��D�܂��C�l�Ԃ͊o���x���Ⴗ�����荂������Ƃ��܂��s���ł����C�K�x�Ȋo���x�̂Ƃ��œK�ȃp�t�H�[�}���X�������ƌ����Ă��܂��D���ȑg�D���}�b�v�ɂ��R�[�h�����f���C�J�I�X�j���[�����l�b�g���[�N�ɂ��z�N���f�����J�����C���{�b�g�������h���ɑ��Ă��C���̂Ƃ��̋C���C�o���x�C�H�~�ɍ������F�������邱�Ƃ��\�ɂȂ�܂����D
�摜���N���b�N���邱�Ƃɂ������f�������邱�Ƃ��ł��܂��D
|
��\�o(�\��) 7�̊�{����̕\���\�o���܂��D |
��\�o(�S��) �\��E�̊��E�r�E���p���ď�\�o���s���܂��D |
|
�h������ ���o�E�G�o�E���o�E�k�o������h���ɔ������܂��D |
�l�X�ȍs�� �_���x���^���Ȃǐl�Ԃɋ߂����������邱�Ƃ��ł��܂��D |
|
�ӎ� �����̎h���ɑ��C���{�b�g���g���ł� �ӎ��������Ă���h���ɔ������܂��D |

|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|
�{����������c��w�q���[�}�m�C�h�������ɂčs���܂����D�{�������̃q���[�}�m�C�h�R���\�[�V�A���ւ̎Q����Ƃɑ��Ċ��ӂ̈ӂ�\���܂��D�܂��{�����̓q���[�}�m�C�h���ی�����ROBOCASA�ɂčs���܂����D�C�^���A�O���ȕ����𗬐U���ǂ̌����E�U���Y�Ɖ��p���ƂɊ��Ӓv���܂��D����ɁC�{�����̈ꕔ�́C������̈ϑ��ł���WABOT-HOUSE �v���W�F�N�g�ɂ��s���܂����D�����Ɏӈӂ�\���܂��D�Ō�ɁC�����ɋ��͒����܂������A���i��w�@��wARTS Lab�C�\���b�h���[�N�X�E�W���p��(��)�C(��) NTT �h�R���C����c��w���H�w���������Z���^�[�C����c��w���w���ؑ��T�����Ɋ��ӂ̈ӂ�\���܂��D
Last Update: 2006-11-01