Fig. 2.1 System Overview of WB-1R
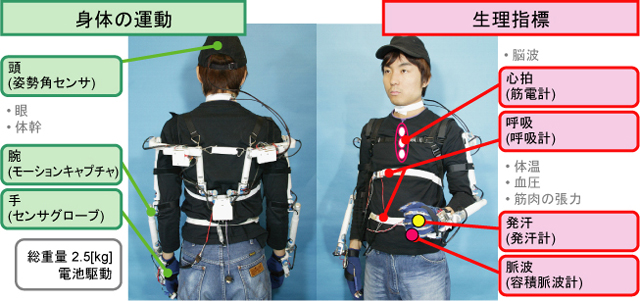
本研究では,ロボットとのインタラクション中に,人間がロボットから受ける心理的影響を客観的に計測することを目標としています.心理的影響は緊張度、感情,意識にでると考えられます.そして,これらは人間の生理指標と身体の動きを取ることにより計測できるのではないかと考えました.これにより心理的影響の計測装置の実現を目指します.
2005年度は,意識の向いている方向や把持状態・ジェスチャを計測するため,頭部姿勢角センサとセンサグローブを開発しました.これを2004年度に開発した生理指標計測システムWB-1に追加・統合し,人間計測システムWB-1R(Waseda Bioinstrumentation system No.1 Refined)を開発しました.
生理指標計測システムWB-1Rはモーションキャプチャ(頭部姿勢,腕部,手部),心電計,脈波計,呼吸計,発汗計より構成されております.総重量は2.5[kg]となっており,電池により駆動します.
Fig. 2.1 System Overview of WB-1R
低価格化および小型化に重点を置き,加速度センサ,圧電振動ジャイロ,地磁気センサで構成された姿勢角計測モジュールを開発しました.頭部Roll角,Pitch角,Yaw角,および首部Pitch角を計測することができます.
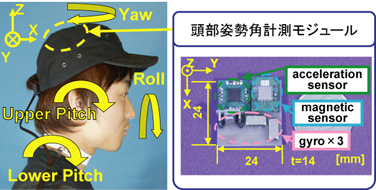
Fig. 2.2 Head Posture Measurement Module |
Video of Head Motion |
腕部モーションキャプチャは,各関節にポテンショメータを配置したシリアルリンク機構の機械式のモーションキャプチャになっています.自由度は両腕で24自由度です.背中から肩までに6自由度を配置することにより,肩のすくみなどに見られる肩の回転中心の移動を計測することができます.

Fig. 2.3 Motion Capture Overview |
Video of Motion Capture |
低価格化に重点を置き,曲げセンサを使用した15自由度のセンサグローブを開発しました.

Fig. 2.4 Sensor Glove |
Video of Hand Motion |
心電計は,心臓の活動の際に生じる微弱な電流を,体表面に電極を貼ることにより,計測します.他の筋電がのらないよう筋肉の少ない胸骨正中線上に,電極を貼り付けました.
また,閾値を設定することにより心拍数を算出します.
Fig. 2.5 心電電極位置 |
Fig. 2.6 心電図(安静時) |
脈波計は小指にLEDを照射し,その透過光をフォトダイオードを用いて計測することにより,血流量の変化を求め,計測します.
また脈波と心電図よりPWTT(脈波伝播時間)が求められ,これより血圧の相対変化を見ることができます.
Fig. 2.7 脈波計測原理図 |
Fig. 2.8 脈波波形(安静時) |
Fig. 2.9 PWTT(脈波伝播時間)
呼吸計はひずみゲージを貼り付けたゴムバンドを,胸部,腹部に巻きつけ,計測します.
胸式呼吸と腹式呼吸の両呼吸法を計測できます.

Fig. 2.10 呼吸計 |
Fig. 2.11 呼吸波形(安静時) |
発汗計は,人指し指と中指に電極を貼り付け,その間に微弱な電流を流すことで,皮膚抵抗の変化を計測します.これにより手のひらに現れる精神性の発汗を計測します.
Fig. 2.12 発汗計電極位置 |
Fig. 2.13 発汗波形 |
各計測装置により計測されたデータは,PICマイコンによりA/D変換され,RS232によりPCへと通信されます.
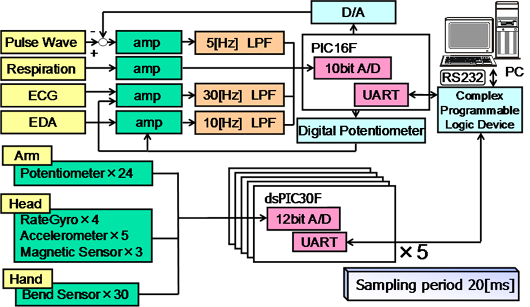
Fig. 3.1 システム構成
本研究は早稲田大学ヒューマノイド研究所にて行われました.本研究所のヒューマノイドコンソーシアムへの参加企業に対して感謝の意を表します.また本研究はヒューマノイド国際研究所ROBOCASAにて行われました.イタリア外務省文化交流振興局の研究・振興産業応用事業に感謝致します.さらに,本研究の一部は,岐阜県からの委託であるWABOT-HOUSE プロジェクトにより行われました.ここに謝意を表します.最後に,研究に協力頂きました聖アンナ大学院大学ARTS Lab,ソリッドワークス・ジャパン(株),早稲田大学理工学総合研究センター,早稲田大学文学部木村裕教授に感謝の意を表します.
Last Update: 2006-11-01