|
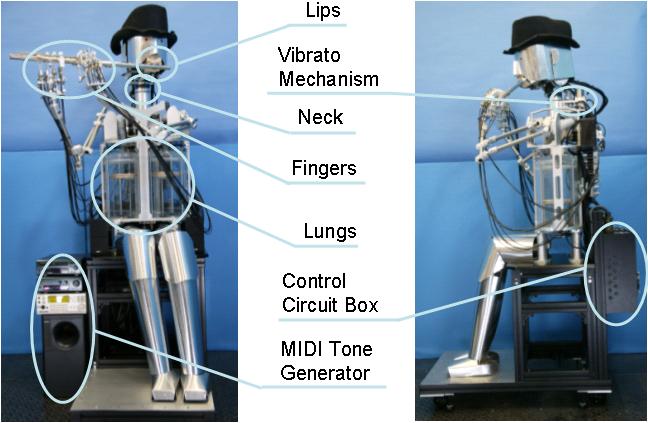
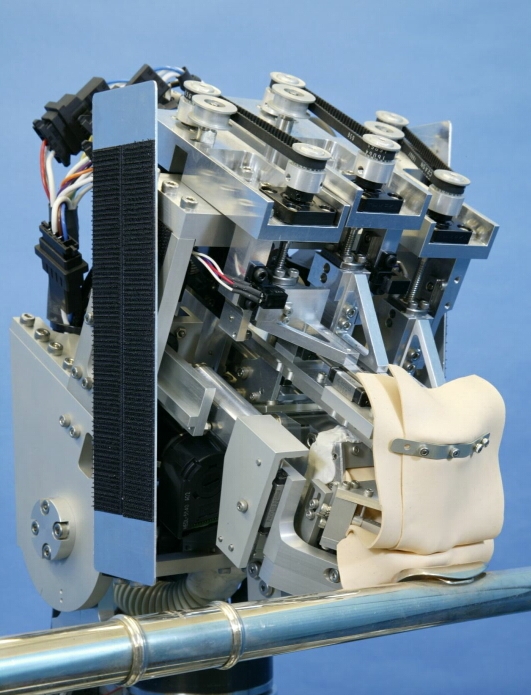
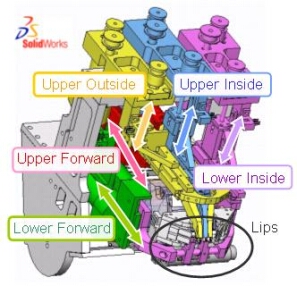
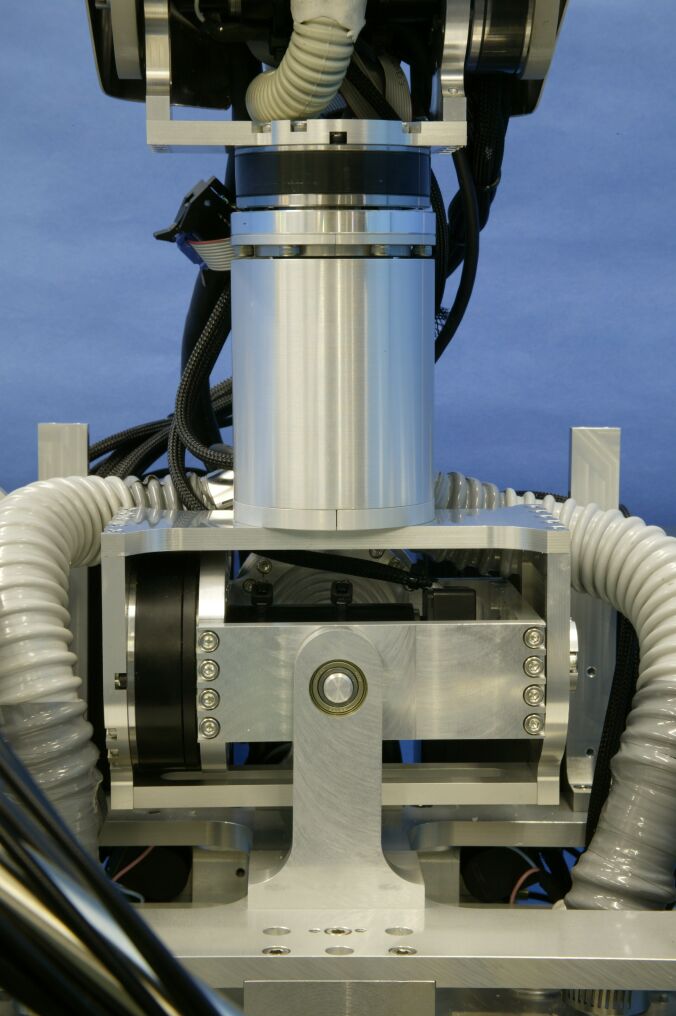
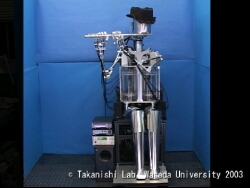
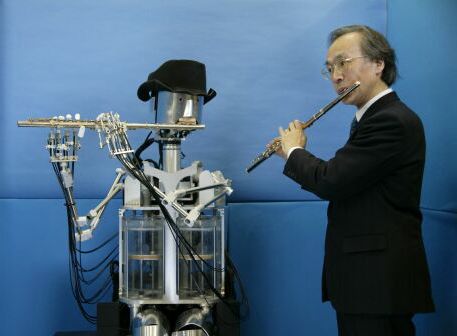
 We have been developing anthropomorphic flutist robots which mechanical design is similar to the human organs (lungs, neck, lips, fingers, tonguing, and vibrato) needed for playing the flute. Since 1990, the aim of this research is for clarifying the flute playing mechanism from an engineering viewpoint and for enabling the communication with humans at emotional level. We have been developing anthropomorphic flutist robots which mechanical design is similar to the human organs (lungs, neck, lips, fingers, tonguing, and vibrato) needed for playing the flute. Since 1990, the aim of this research is for clarifying the flute playing mechanism from an engineering viewpoint and for enabling the communication with humans at emotional level.
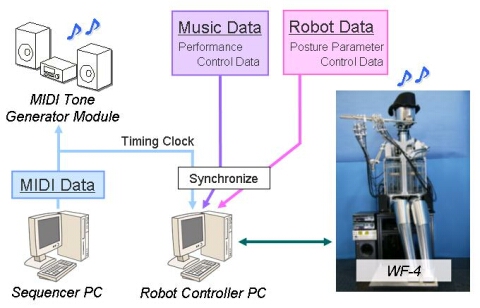
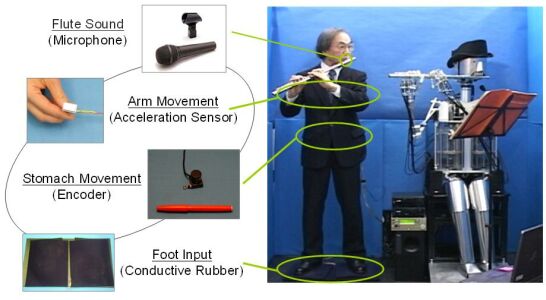
We are developing the human mimetic performance and a real-time interaction system for collaborating with a flutist player.
Click the below links to jump to the details of the previous flutist robot.
|
|